 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteracting Multiple Model Proprioceptive Odometry for Legged Robots
Mar 31, 2026State estimation for legged robots remains challenging because legged odometry generally suffers from limited observability and therefore depends critically on measurement constraints to suppress drift. When exteroceptive sensors are unreliable or degraded, such constraints are mainly derived from proprioceptive measurements, particularly contact-related leg kinematics information. However, most existing proprioceptive odometry methods rely on an idealized point-contact assumption, which is often violated during real locomotion. Consequently, the effectiveness of proprioceptive constraints may be significantly reduced, resulting in degraded estimation accuracy. To address these limitations, we propose an interacting multiple model (IMM)-based proprioceptive odometry framework for legged robots. By incorporating multiple contact hypotheses within a unified probabilistic framework, the proposed method enables online mode switching and probabilistic fusion under varying contact conditions. Extensive simulations and real-world experiments demonstrate that the proposed method achieves superior pose estimation accuracy over state-of-the-art methods while maintaining comparable computational efficiency.
Lie-algebra Adaptive Tracking Control for Rigid Body Dynamics
Feb 08, 2025


Adaptive tracking control for rigid body dynamics is of critical importance in control and robotics, particularly for addressing uncertainties or variations in system model parameters. However, most existing adaptive control methods are designed for systems with states in vector spaces, often neglecting the manifold constraints inherent to robotic systems. In this work, we propose a novel Lie-algebra-based adaptive control method that leverages the intrinsic relationship between the special Euclidean group and its associated Lie algebra. By transforming the state space from the group manifold to a vector space, we derive a linear error dynamics model that decouples model parameters from the system state. This formulation enables the development of an adaptive optimal control method that is both geometrically consistent and computationally efficient. Extensive simulations demonstrate the effectiveness and efficiency of the proposed method. We have made our source code publicly available to the community to support further research and collaboration.
Bias-VarianceTrade-off in Kalman Filter-Based Disturbance Observers
Oct 07, 2024The performance of disturbance observers is strongly influenced by the level of prior knowledge about the disturbance model. The simultaneous input and state estimation (SISE) algorithm is widely recognized for providing unbiased minimum-variance estimates under arbitrary disturbance models. In contrast, the Kalman filter-based disturbance observer (KF-DOB) achieves minimum mean-square error estimation when the disturbance model is fully specified. However, practical scenarios often fall between these extremes, where only partial knowledge of the disturbance model is available. This paper investigates the inherent bias-variance trade-off in KF-DOB when the disturbance model is incomplete. We further show that SISE can be interpreted as a special case of KF-DOB, where the disturbance noise covariance tends to infinity. To address this trade-off, we propose two novel estimators: the multi-kernel correntropy Kalman filter-based disturbance observer (MKCKF-DOB) and the interacting multiple models Kalman filter-based disturbance observer (IMMKF-DOB). Simulations verify the effectiveness of the proposed methods.
Multi-kernel Correntropy-based Orientation Estimation of IMUs: Gradient Descent Methods
Apr 13, 2023
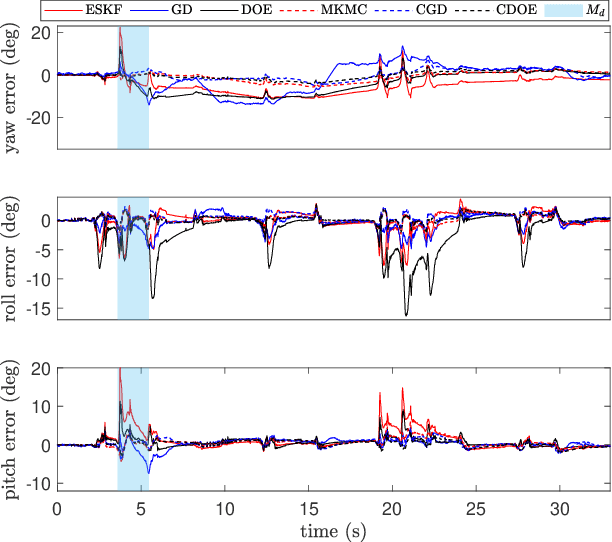
This paper presents two computationally efficient algorithms for the orientation estimation of inertial measurement units (IMUs): the correntropy-based gradient descent (CGD) and the correntropy-based decoupled orientation estimation (CDOE). Traditional methods, such as gradient descent (GD) and decoupled orientation estimation (DOE), rely on the mean squared error (MSE) criterion, making them vulnerable to external acceleration and magnetic interference. To address this issue, we demonstrate that the multi-kernel correntropy loss (MKCL) is an optimal objective function for maximum likelihood estimation (MLE) when the noise follows a type of heavy-tailed distribution. In certain situations, the estimation error of the MKCL is bounded even in the presence of arbitrarily large outliers. By replacing the standard MSE cost function with MKCL, we develop the CGD and CDOE algorithms. We evaluate the effectiveness of our proposed methods by comparing them with existing algorithms in various situations. Experimental results indicate that our proposed methods (CGD and CDOE) outperform their conventional counterparts (GD and DOE), especially when faced with external acceleration and magnetic disturbances. Furthermore, the new algorithms demonstrate significantly lower computational complexity than Kalman filter-based approaches, making them suitable for applications with low-cost microprocessors.