 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLie-algebra Adaptive Tracking Control for Rigid Body Dynamics
Paper and Code

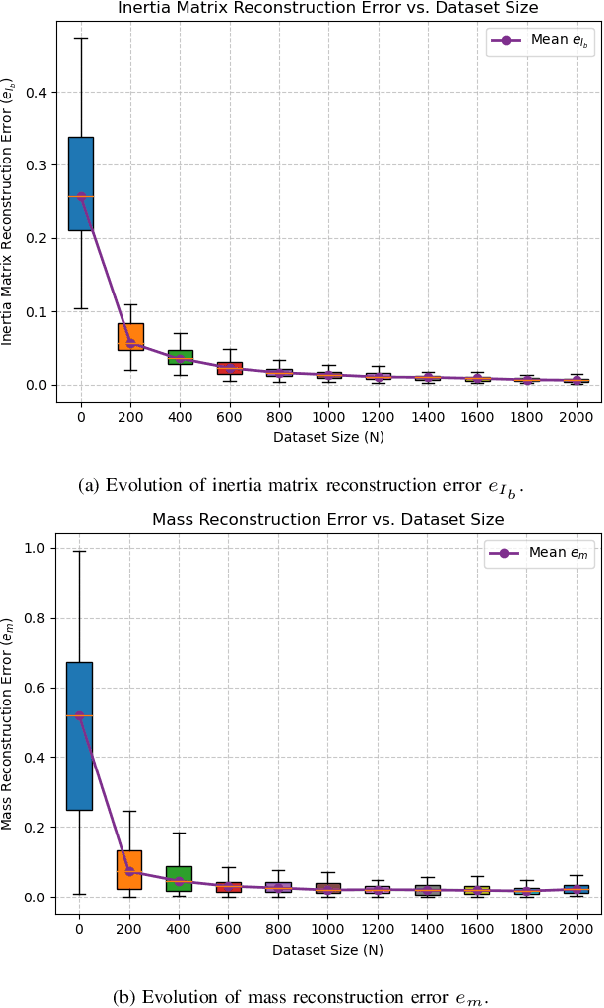


Adaptive tracking control for rigid body dynamics is of critical importance in control and robotics, particularly for addressing uncertainties or variations in system model parameters. However, most existing adaptive control methods are designed for systems with states in vector spaces, often neglecting the manifold constraints inherent to robotic systems. In this work, we propose a novel Lie-algebra-based adaptive control method that leverages the intrinsic relationship between the special Euclidean group and its associated Lie algebra. By transforming the state space from the group manifold to a vector space, we derive a linear error dynamics model that decouples model parameters from the system state. This formulation enables the development of an adaptive optimal control method that is both geometrically consistent and computationally efficient. Extensive simulations demonstrate the effectiveness and efficiency of the proposed method. We have made our source code publicly available to the community to support further research and collaboration.