 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteracting Multiple Model Proprioceptive Odometry for Legged Robots
Mar 31, 2026State estimation for legged robots remains challenging because legged odometry generally suffers from limited observability and therefore depends critically on measurement constraints to suppress drift. When exteroceptive sensors are unreliable or degraded, such constraints are mainly derived from proprioceptive measurements, particularly contact-related leg kinematics information. However, most existing proprioceptive odometry methods rely on an idealized point-contact assumption, which is often violated during real locomotion. Consequently, the effectiveness of proprioceptive constraints may be significantly reduced, resulting in degraded estimation accuracy. To address these limitations, we propose an interacting multiple model (IMM)-based proprioceptive odometry framework for legged robots. By incorporating multiple contact hypotheses within a unified probabilistic framework, the proposed method enables online mode switching and probabilistic fusion under varying contact conditions. Extensive simulations and real-world experiments demonstrate that the proposed method achieves superior pose estimation accuracy over state-of-the-art methods while maintaining comparable computational efficiency.
Gentle Manipulation Policy Learning via Demonstrations from VLM Planned Atomic Skills
Nov 08, 2025Autonomous execution of long-horizon, contact-rich manipulation tasks traditionally requires extensive real-world data and expert engineering, posing significant cost and scalability challenges. This paper proposes a novel framework integrating hierarchical semantic decomposition, reinforcement learning (RL), visual language models (VLMs), and knowledge distillation to overcome these limitations. Complex tasks are decomposed into atomic skills, with RL-trained policies for each primitive exclusively in simulation. Crucially, our RL formulation incorporates explicit force constraints to prevent object damage during delicate interactions. VLMs perform high-level task decomposition and skill planning, generating diverse expert demonstrations. These are distilled into a unified policy via Visual-Tactile Diffusion Policy for end-to-end execution. We conduct comprehensive ablation studies exploring different VLM-based task planners to identify optimal demonstration generation pipelines, and systematically compare imitation learning algorithms for skill distillation. Extensive simulation experiments and physical deployment validate that our approach achieves policy learning for long-horizon manipulation without costly human demonstrations, while the VLM-guided atomic skill framework enables scalable generalization to diverse tasks.
Robust Dynamic Control Barrier Function Based Trajectory Planning for Mobile Manipulator
Jun 22, 2024High-dimensional robot dynamic trajectory planning poses many challenges for traditional planning algorithms. Existing planning methods suffer from issues such as long computation times, limited capacity to address intricate obstacle models, and lack of consideration for external disturbances and measurement inaccuracies in these high-dimensional systems. To tackle these challenges, this paper proposes a novel trajectory planning approach that combines Dynamic Control Barrier Function (DCBF) with a disturbance observer to create a Robust Dynamic Control Barrier Function (RDCBF) planner. This approach successfully plans trajectories in environments with complex dynamic obstacles while accounting for external disturbances and measurement uncertainties, ensuring system safety and enabling precise obstacle avoidance. Experimental results on a mobile manipulator demonstrate outstanding performance of the proposed approach.
Dynamic Object Tracking for Quadruped Manipulator with Spherical Image-Based Approach
Jul 14, 2023Exactly estimating and tracking the motion of surrounding dynamic objects is one of important tasks for the autonomy of a quadruped manipulator. However, with only an onboard RGB camera, it is still a challenging work for a quadruped manipulator to track the motion of a dynamic object moving with unknown and changing velocities. To address this problem, this manuscript proposes a novel image-based visual servoing (IBVS) approach consisting of three elements: a spherical projection model, a robust super-twisting observer, and a model predictive controller (MPC). The spherical projection model decouples the visual error of the dynamic target into linear and angular ones. Then, with the presence of the visual error, the robustness of the observer is exploited to estimate the unknown and changing velocities of the dynamic target without depth estimation. Finally, the estimated velocity is fed into the model predictive controller (MPC) to generate joint torques for the quadruped manipulator to track the motion of the dynamical target. The proposed approach is validated through hardware experiments and the experimental results illustrate the approach's effectiveness in improving the autonomy of the quadruped manipulator.
Proxy-based Super Twisting Control Algorithm for Aerial Manipulators
May 06, 2023



Aerial manipulators are composed of an aerial multi-rotor that is equipped with a 6-DOF servo robot arm. To achieve precise position and attitude control during the arm's motion, it is critical for the system to have high performance control capabilities. However, the coupling effect between the multi-rotor UAVs' movement poses a challenge to the entire system's control capability. We have proposed a new proxy-based super twisting control approach for quadrotor UAVs that mitigates the disturbance caused by moving manipulators. This approach helps improve the stability of the aerial manipulation system when carrying out hovering or trajectory tracking tasks. The controller's effectiveness has been validated through numerical simulation and further tested in the Gazebo simulation environment.
PC-SNN: Supervised Learning with Local Hebbian Synaptic Plasticity based on Predictive Coding in Spiking Neural Networks
Nov 24, 2022Deemed as the third generation of neural networks, the event-driven Spiking Neural Networks(SNNs) combined with bio-plausible local learning rules make it promising to build low-power, neuromorphic hardware for SNNs. However, because of the non-linearity and discrete property of spiking neural networks, the training of SNN remains difficult and is still under discussion. Originating from gradient descent, backprop has achieved stunning success in multi-layer SNNs. Nevertheless, it is assumed to lack biological plausibility, while consuming relatively high computational resources. In this paper, we propose a novel learning algorithm inspired by predictive coding theory and show that it can perform supervised learning fully autonomously and successfully as the backprop, utilizing only local Hebbian plasticity. Furthermore, this method achieves a favorable performance compared to the state-of-the-art multi-layer SNNs: test accuracy of 99.25% for the Caltech Face/Motorbike dataset, 84.25% for the ETH-80 dataset, 98.1% for the MNIST dataset and 98.5% for the neuromorphic dataset: N-MNIST. Furthermore, our work provides a new perspective on how supervised learning algorithms are directly implemented in spiking neural circuitry, which may give some new insights into neuromorphological calculation in neuroscience.
DS-VIO: Robust and Efficient Stereo Visual Inertial Odometry based on Dual Stage EKF
May 02, 2019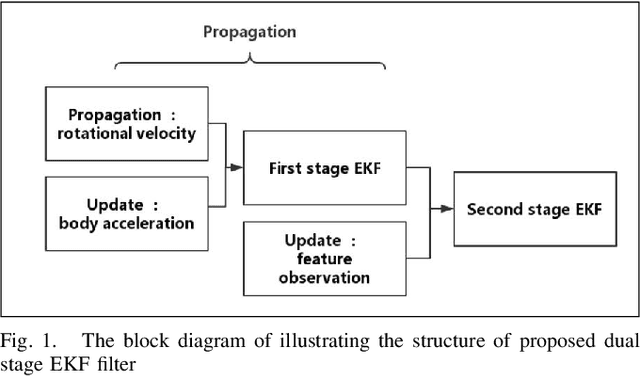
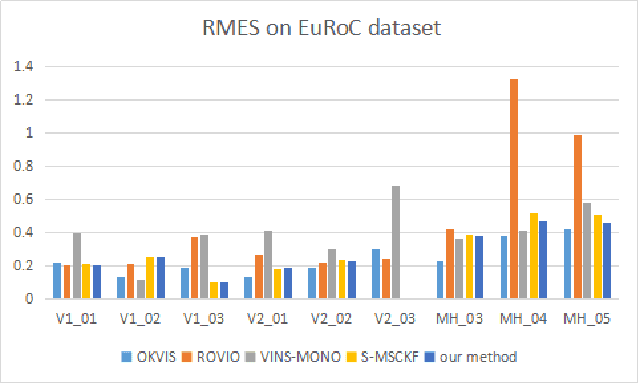
This paper presents a dual stage EKF (Extended Kalman Filter)-based algorithm for the real-time and robust stereo VIO (visual inertial odometry). The first stage of this EKF-based algorithm performs the fusion of accelerometer and gyroscope while the second performs the fusion of stereo camera and IMU. Due to the sufficient complementary characteristics between accelerometer and gyroscope as well as stereo camera and IMU, the dual stage EKF-based algorithm can achieve a high precision of odometry estimations. At the same time, because of the low dimension of state vector in this algorithm, its computational efficiency is comparable to previous filter-based approaches. We call our approach DS-VIO (dual stage EKFbased stereo visual inertial odometry) and evaluate our DSVIO algorithm by comparing it with the state-of-art approaches including OKVIS, ROVIO, VINS-MONO and S-MSCKF on the EuRoC dataset. Results show that our algorithm can achieve comparable or even better performances in terms of the RMS error