 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating 6-D Trajectories for Omnidirectional Multirotor Aerial Vehicles in Cluttered Environments
Apr 16, 2024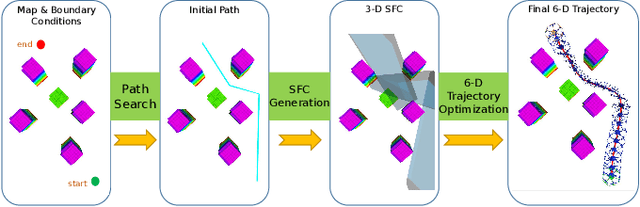

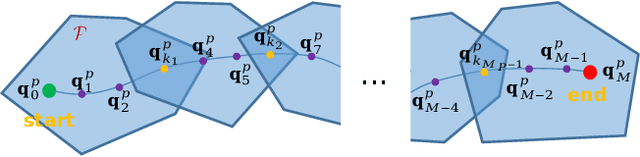
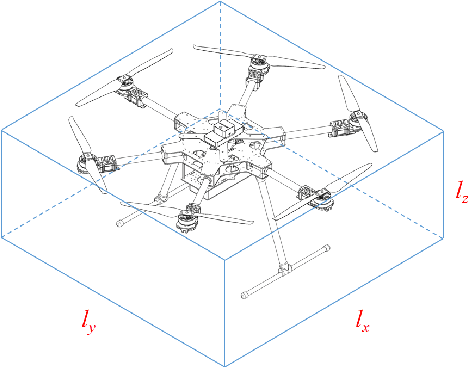
As fully-actuated systems, omnidirectional multirotor aerial vehicles (OMAVs) have more flexible maneuverability and advantages in aggressive flight in cluttered environments than traditional underactuated MAVs. %Due to the high dimensionality of configuration space, making the designed trajectory generation algorithm efficient is challenging. This paper aims to achieve safe flight of OMAVs in cluttered environments. Considering existing static obstacles, an efficient optimization-based framework is proposed to generate 6-D $SE(3)$ trajectories for OMAVs. Given the kinodynamic constraints and the 3D collision-free region represented by a series of intersecting convex polyhedra, the proposed method finally generates a safe and dynamically feasible 6-D trajectory. First, we parameterize the vehicle's attitude into a free 3D vector using stereographic projection to eliminate the constraints inherent in the $SO(3)$ manifold, while the complete $SE(3)$ trajectory is represented as a 6-D polynomial in time without inherent constraints. The vehicle's shape is modeled as a cuboid attached to the body frame to achieve whole-body collision evaluation. Then, we formulate the origin trajectory generation problem as a constrained optimization problem. The original constrained problem is finally transformed into an unconstrained one that can be solved efficiently. To verify the proposed framework's performance, simulations and real-world experiments based on a tilt-rotor hexarotor aerial vehicle are carried out.
MSI-NeRF: Linking Omni-Depth with View Synthesis through Multi-Sphere Image aided Generalizable Neural Radiance Field
Mar 16, 2024



Panoramic observation using fisheye cameras is significant in robot perception, reconstruction, and remote operation. However, panoramic images synthesized by traditional methods lack depth information and can only provide three degrees-of-freedom (3DoF) rotation rendering in virtual reality applications. To fully preserve and exploit the parallax information within the original fisheye cameras, we introduce MSI-NeRF, which combines deep learning omnidirectional depth estimation and novel view rendering. We first construct a multi-sphere image as a cost volume through feature extraction and warping of the input images. It is then processed by geometry and appearance decoders, respectively. Unlike methods that regress depth maps directly, we further build an implicit radiance field using spatial points and interpolated 3D feature vectors as input. In this way, we can simultaneously realize omnidirectional depth estimation and 6DoF view synthesis. Our method is trained in a semi-self-supervised manner. It does not require target view images and only uses depth data for supervision. Our network has the generalization ability to reconstruct unknown scenes efficiently using only four images. Experimental results show that our method outperforms existing methods in depth estimation and novel view synthesis tasks.
Proxy-based Super Twisting Control Algorithm for Aerial Manipulators
May 06, 2023



Aerial manipulators are composed of an aerial multi-rotor that is equipped with a 6-DOF servo robot arm. To achieve precise position and attitude control during the arm's motion, it is critical for the system to have high performance control capabilities. However, the coupling effect between the multi-rotor UAVs' movement poses a challenge to the entire system's control capability. We have proposed a new proxy-based super twisting control approach for quadrotor UAVs that mitigates the disturbance caused by moving manipulators. This approach helps improve the stability of the aerial manipulation system when carrying out hovering or trajectory tracking tasks. The controller's effectiveness has been validated through numerical simulation and further tested in the Gazebo simulation environment.
Active Implicit Object Reconstruction using Uncertainty-guided Next-Best-View Optimziation
Mar 29, 2023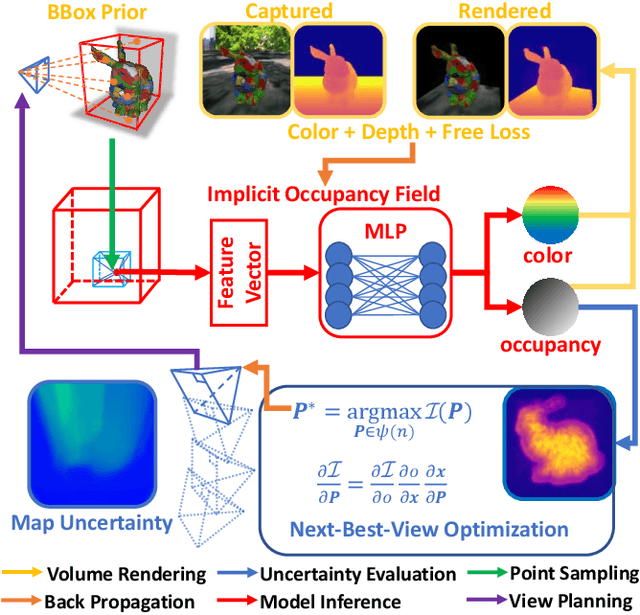
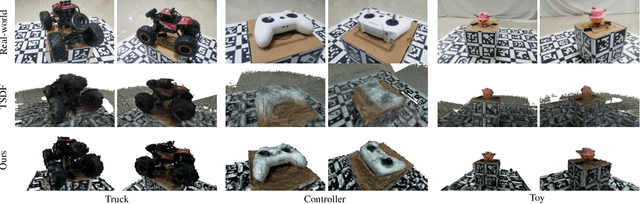
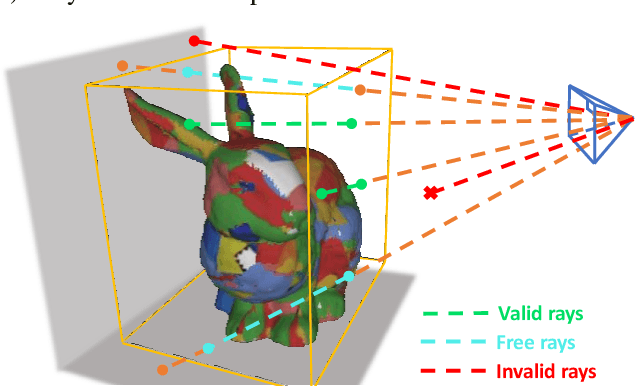
Actively planning sensor views during object reconstruction is essential to autonomous mobile robots. This task is usually performed by evaluating information gain from an explicit uncertainty map. Existing algorithms compare options among a set of preset candidate views and select the next-best-view from them. In contrast to these, we take the emerging implicit representation as the object model and seamlessly combine it with the active reconstruction task. To fully integrate observation information into the model, we propose a supervision method specifically for object-level reconstruction that considers both valid and free space. Additionally, to directly evaluate view information from the implicit object model, we introduce a sample-based uncertainty evaluation method. It samples points on rays directly from the object model and uses variations of implicit function inferences as the uncertainty metrics, with no need for voxel traversal or an additional information map. Leveraging the differentiability of our metrics, it is possible to optimize the next-best-view by maximizing the uncertainty continuously. This does away with the traditionally-used candidate views setting, which may provide sub-optimal results. Experiments in simulations and real-world scenes show that our method effectively improves the reconstruction accuracy and the view-planning efficiency of active reconstruction tasks. The proposed system is going to open source at https://github.com/HITSZ-NRSL/ActiveImplicitRecon.git.
Adaptive Nonlinear MPC for Trajectory Tracking of An Overactuated Tiltrotor Hexacopter
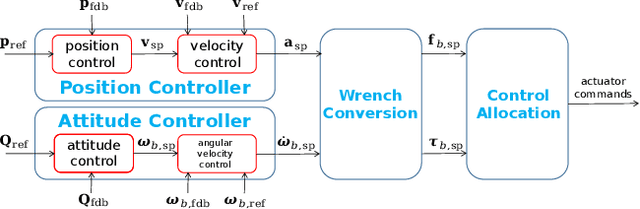
Nov 12, 2022Omnidirectional micro aerial vehicles (OMAVs) are more capable of doing environmentally interactive tasks due to their ability to exert full wrenches while maintaining stable poses. However, OMAVs often incorporate additional actuators and complex mechanical structures to achieve omnidirectionality. Obtaining precise mathematical models is difficult, and the mismatch between the model and the real physical system is not trivial. The large model-plant mismatch significantly degrades overall system performance if a non-adaptive model predictive controller (MPC) is used. This work presents the $\mathcal{L}_1$-MPC, an adaptive nonlinear model predictive controller for accurate 6-DOF trajectory tracking of an overactuated tiltrotor hexacopter in the presence of model uncertainties and external disturbances. The $\mathcal{L}_1$-MPC adopts a cascaded system architecture in which a nominal MPC is followed and augmented by an $\mathcal{L}_1$ adaptive controller. The proposed method is evaluated against the non-adaptive MPC, the EKF-MPC, and the PID method in both numerical and PX4 software-in-the-loop simulation with Gazebo. The $\mathcal{L}_1$-MPC reduces the tracking error by around 90% when compared to a non-adaptive MPC, and the $\mathcal{L}_1$-MPC has lower tracking errors, higher uncertainty estimation rates, and less tuning requirements over the EKF-MPC. We will make the implementations, including the hardware-verified PX4 firmware and Gazebo plugins, open-source at https://github.com/HITSZ-NRSL/omniHex.
Collision-Free 6-DoF Trajectory Generation for Omnidirectional Multi-rotor Aerial Vehicle
Sep 26, 2022


As a kind of fully actuated system, omnidirectional multirotor aerial vehicles (OMAVs) has more flexible maneuverability than traditional underactuated multirotor aircraft, and it also has more significant advantages in obstacle avoidance flight in complex environments.However, there is almost no way to generate the full degrees of freedom trajectory that can play the OMAVs' potential.Due to the high dimensionality of configuration space, it is challenging to make the designed trajectory generation algorithm efficient and scalable.This paper aims to achieve obstacle avoidance planning of OMAV in complex environments. A 6-DoF trajectory generation framework for OMAVs was designed for the first time based on the geometrically constrained Minimum Control Effort (MINCO) trajectory generation framework.According to the safe regions represented by a series of convex polyhedra, combined with the aircraft's overall shape and dynamic constraints, the framework finally generates a collision-free optimal 6-DoF trajectory.The vehicle's attitude is parameterized into a 3D vector by stereographic projection.Simulation experiments based on Gazebo and PX4 Autopilot are conducted to verify the performance of the proposed framework.
Simulation Platform for Autonomous Aerial Manipulation in Dynamic Environments
Mar 19, 2021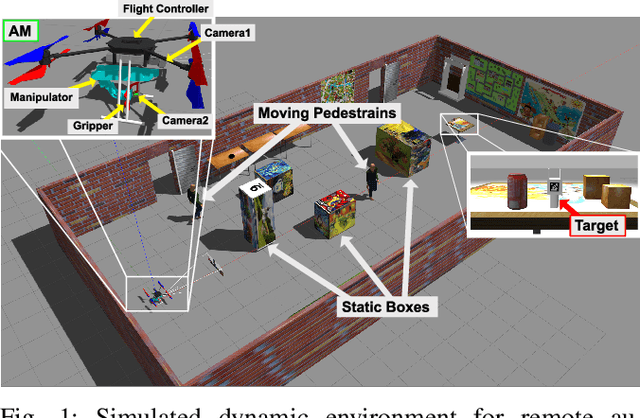
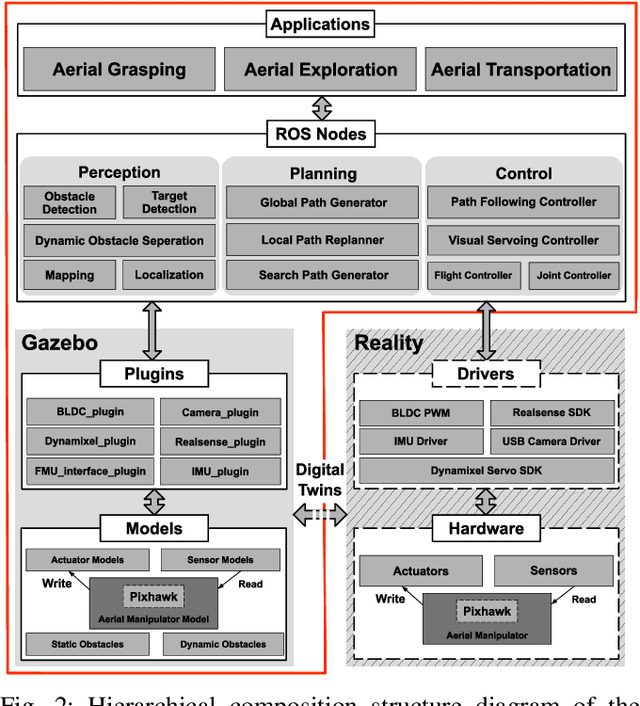
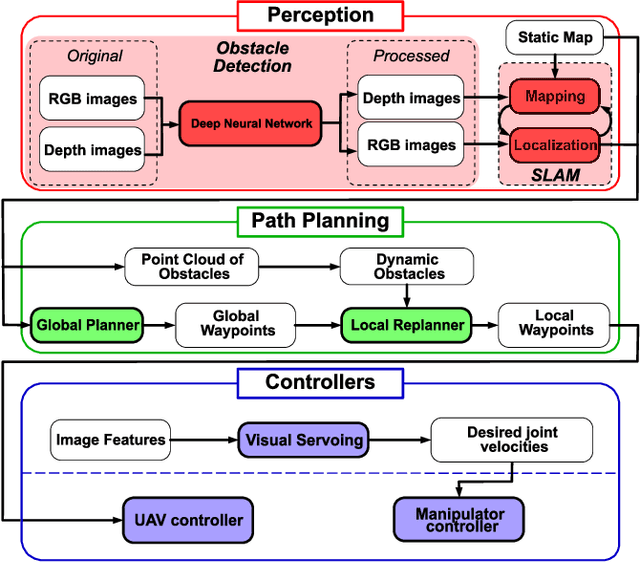
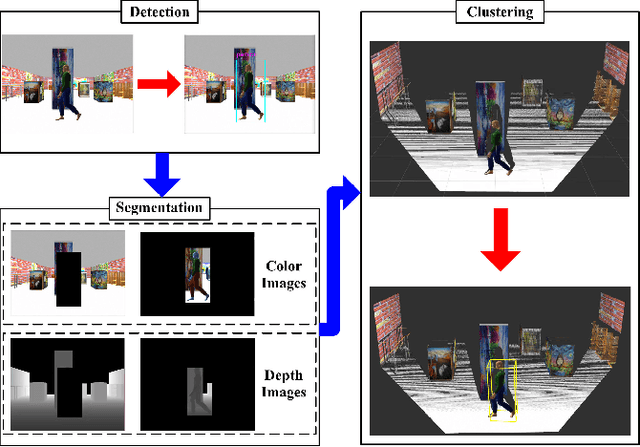
The aerial manipulator (AM) is a systematic operational robotic platform in high standard on algorithm robustness. Directly deploying the algorithms to the practical system will take numerous trial and error costs and even cause destructive results. In this paper, a new modular simulation platform is designed to evaluate aerial manipulation related algorithms before deploying. In addition, to realize a fully autonomous aerial grasping, a series of algorithm modules consisting a complete workflow are designed and integrated in the simulation platform, including perception, planning and control modules. This framework empowers the AM to autonomously grasp remote targets without colliding with surrounding obstacles relying only on on-board sensors. Benefiting from its modular design, this software architecture can be easily extended with additional algorithms. Finally, several simulations are performed to verify the effectiveness of the proposed system.