 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Implicit Object Reconstruction using Uncertainty-guided Next-Best-View Optimziation
Paper and Code
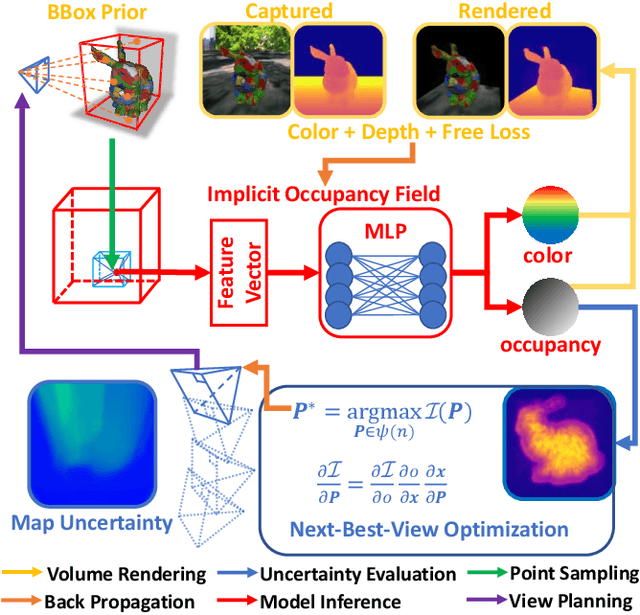
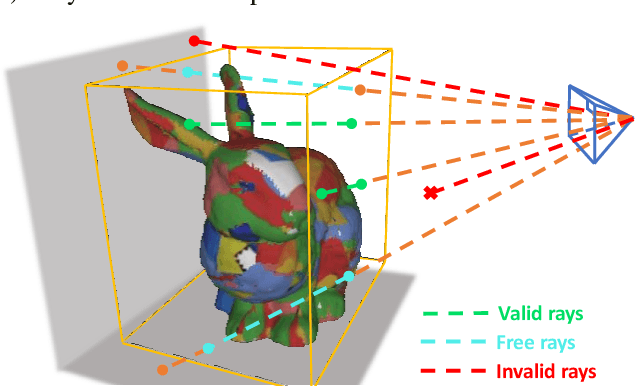
Actively planning sensor views during object reconstruction is essential to autonomous mobile robots. This task is usually performed by evaluating information gain from an explicit uncertainty map. Existing algorithms compare options among a set of preset candidate views and select the next-best-view from them. In contrast to these, we take the emerging implicit representation as the object model and seamlessly combine it with the active reconstruction task. To fully integrate observation information into the model, we propose a supervision method specifically for object-level reconstruction that considers both valid and free space. Additionally, to directly evaluate view information from the implicit object model, we introduce a sample-based uncertainty evaluation method. It samples points on rays directly from the object model and uses variations of implicit function inferences as the uncertainty metrics, with no need for voxel traversal or an additional information map. Leveraging the differentiability of our metrics, it is possible to optimize the next-best-view by maximizing the uncertainty continuously. This does away with the traditionally-used candidate views setting, which may provide sub-optimal results. Experiments in simulations and real-world scenes show that our method effectively improves the reconstruction accuracy and the view-planning efficiency of active reconstruction tasks. The proposed system is going to open source at https://github.com/HITSZ-NRSL/ActiveImplicitRecon.git.