 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurriculum Reinforcement Learning for Quadrotor Racing with Random Obstacles
Feb 27, 2026Autonomous drone racing has attracted increasing interest as a research topic for exploring the limits of agile flight. However, existing studies primarily focus on obstacle-free racetracks, while the perception and dynamic challenges introduced by obstacles remain underexplored, often resulting in low success rates and limited robustness in real-world flight. To this end, we propose a novel vision-based curriculum reinforcement learning framework for training a robust controller capable of addressing unseen obstacles in drone racing. We combine multi-stage cu rriculum learning, domain randomization, and a multi-scene updating strategy to address the conflicting challenges of obstacle avoidance and gate traversal. Our end-to-end control policy is implemented as a single network, allowing high-speed flight of quadrotors in environments with variable obstacles. Both hardware-in-the-loop and real-world experiments demonstrate that our method achieves faster lap times and higher success rates than existing approaches, effectively advancing drone racing in obstacle-rich environments. The video and code are available at: https://github.com/SJTU-ViSYS-team/CRL-Drone-Racing.
Learning Generalizable Policy for Obstacle-Aware Autonomous Drone Racing
Nov 06, 2024Autonomous drone racing has gained attention for its potential to push the boundaries of drone navigation technologies. While much of the existing research focuses on racing in obstacle-free environments, few studies have addressed the complexities of obstacle-aware racing, and approaches presented in these studies often suffer from overfitting, with learned policies generalizing poorly to new environments. This work addresses the challenge of developing a generalizable obstacle-aware drone racing policy using deep reinforcement learning. We propose applying domain randomization on racing tracks and obstacle configurations before every rollout, combined with parallel experience collection in randomized environments to achieve the goal. The proposed randomization strategy is shown to be effective through simulated experiments where drones reach speeds of up to 70 km/h, racing in unseen cluttered environments. This study serves as a stepping stone toward learning robust policies for obstacle-aware drone racing and general-purpose drone navigation in cluttered environments. Code is available at https://github.com/ErcBunny/IsaacGymEnvs.
Generating 6-D Trajectories for Omnidirectional Multirotor Aerial Vehicles in Cluttered Environments
Apr 16, 2024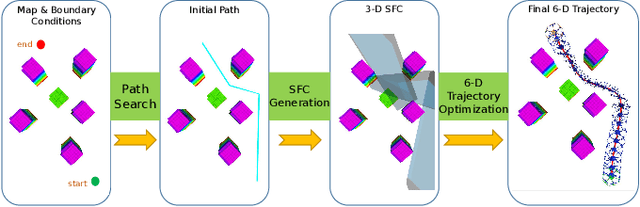

As fully-actuated systems, omnidirectional multirotor aerial vehicles (OMAVs) have more flexible maneuverability and advantages in aggressive flight in cluttered environments than traditional underactuated MAVs. %Due to the high dimensionality of configuration space, making the designed trajectory generation algorithm efficient is challenging. This paper aims to achieve safe flight of OMAVs in cluttered environments. Considering existing static obstacles, an efficient optimization-based framework is proposed to generate 6-D $SE(3)$ trajectories for OMAVs. Given the kinodynamic constraints and the 3D collision-free region represented by a series of intersecting convex polyhedra, the proposed method finally generates a safe and dynamically feasible 6-D trajectory. First, we parameterize the vehicle's attitude into a free 3D vector using stereographic projection to eliminate the constraints inherent in the $SO(3)$ manifold, while the complete $SE(3)$ trajectory is represented as a 6-D polynomial in time without inherent constraints. The vehicle's shape is modeled as a cuboid attached to the body frame to achieve whole-body collision evaluation. Then, we formulate the origin trajectory generation problem as a constrained optimization problem. The original constrained problem is finally transformed into an unconstrained one that can be solved efficiently. To verify the proposed framework's performance, simulations and real-world experiments based on a tilt-rotor hexarotor aerial vehicle are carried out.
RGB-D Inertial Odometry for a Resource-Restricted Robot in Dynamic Environments
Apr 21, 2023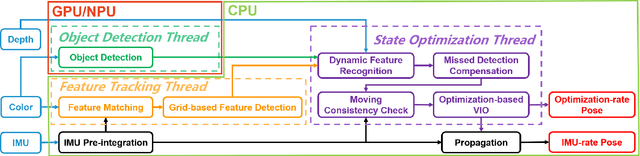
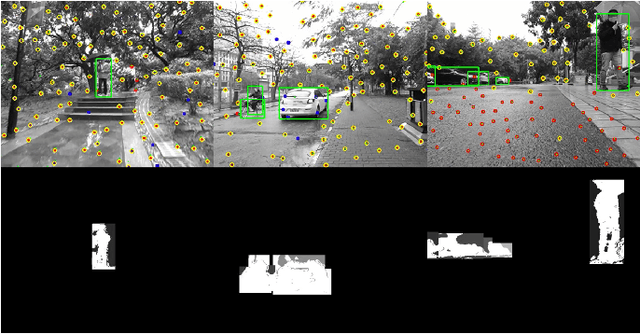
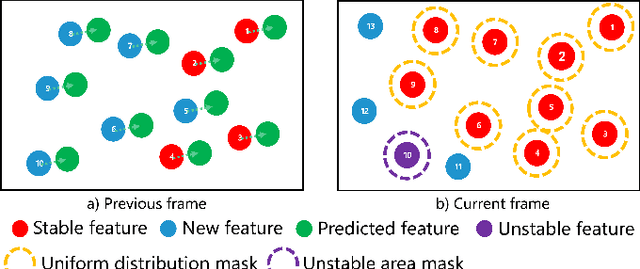
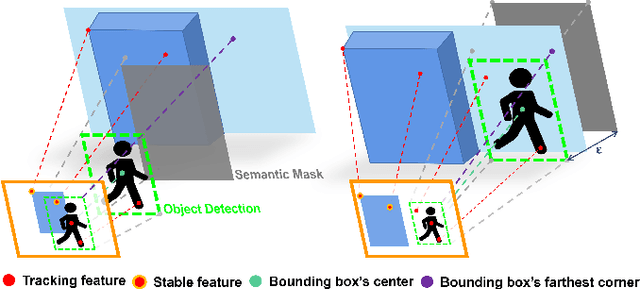
Current simultaneous localization and mapping (SLAM) algorithms perform well in static environments but easily fail in dynamic environments. Recent works introduce deep learning-based semantic information to SLAM systems to reduce the influence of dynamic objects. However, it is still challenging to apply a robust localization in dynamic environments for resource-restricted robots. This paper proposes a real-time RGB-D inertial odometry system for resource-restricted robots in dynamic environments named Dynamic-VINS. Three main threads run in parallel: object detection, feature tracking, and state optimization. The proposed Dynamic-VINS combines object detection and depth information for dynamic feature recognition and achieves performance comparable to semantic segmentation. Dynamic-VINS adopts grid-based feature detection and proposes a fast and efficient method to extract high-quality FAST feature points. IMU is applied to predict motion for feature tracking and moving consistency check. The proposed method is evaluated on both public datasets and real-world applications and shows competitive localization accuracy and robustness in dynamic environments. Yet, to the best of our knowledge, it is the best-performance real-time RGB-D inertial odometry for resource-restricted platforms in dynamic environments for now. The proposed system is open source at: https://github.com/HITSZ-NRSL/Dynamic-VINS.git
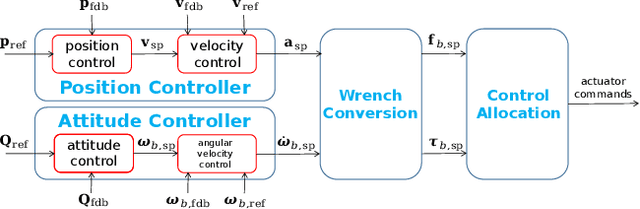
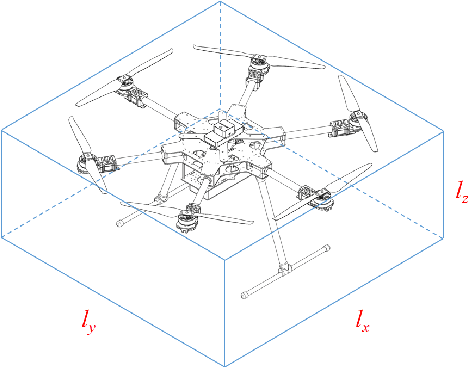
Adaptive Nonlinear MPC for Trajectory Tracking of An Overactuated Tiltrotor Hexacopter
Nov 12, 2022Omnidirectional micro aerial vehicles (OMAVs) are more capable of doing environmentally interactive tasks due to their ability to exert full wrenches while maintaining stable poses. However, OMAVs often incorporate additional actuators and complex mechanical structures to achieve omnidirectionality. Obtaining precise mathematical models is difficult, and the mismatch between the model and the real physical system is not trivial. The large model-plant mismatch significantly degrades overall system performance if a non-adaptive model predictive controller (MPC) is used. This work presents the $\mathcal{L}_1$-MPC, an adaptive nonlinear model predictive controller for accurate 6-DOF trajectory tracking of an overactuated tiltrotor hexacopter in the presence of model uncertainties and external disturbances. The $\mathcal{L}_1$-MPC adopts a cascaded system architecture in which a nominal MPC is followed and augmented by an $\mathcal{L}_1$ adaptive controller. The proposed method is evaluated against the non-adaptive MPC, the EKF-MPC, and the PID method in both numerical and PX4 software-in-the-loop simulation with Gazebo. The $\mathcal{L}_1$-MPC reduces the tracking error by around 90% when compared to a non-adaptive MPC, and the $\mathcal{L}_1$-MPC has lower tracking errors, higher uncertainty estimation rates, and less tuning requirements over the EKF-MPC. We will make the implementations, including the hardware-verified PX4 firmware and Gazebo plugins, open-source at https://github.com/HITSZ-NRSL/omniHex.
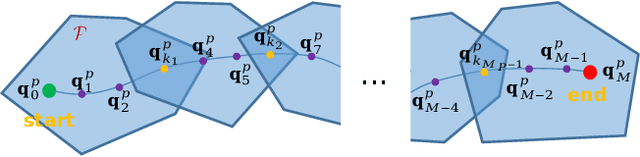
Collision-Free 6-DoF Trajectory Generation for Omnidirectional Multi-rotor Aerial Vehicle
Sep 26, 2022


As a kind of fully actuated system, omnidirectional multirotor aerial vehicles (OMAVs) has more flexible maneuverability than traditional underactuated multirotor aircraft, and it also has more significant advantages in obstacle avoidance flight in complex environments.However, there is almost no way to generate the full degrees of freedom trajectory that can play the OMAVs' potential.Due to the high dimensionality of configuration space, it is challenging to make the designed trajectory generation algorithm efficient and scalable.This paper aims to achieve obstacle avoidance planning of OMAV in complex environments. A 6-DoF trajectory generation framework for OMAVs was designed for the first time based on the geometrically constrained Minimum Control Effort (MINCO) trajectory generation framework.According to the safe regions represented by a series of convex polyhedra, combined with the aircraft's overall shape and dynamic constraints, the framework finally generates a collision-free optimal 6-DoF trajectory.The vehicle's attitude is parameterized into a 3D vector by stereographic projection.Simulation experiments based on Gazebo and PX4 Autopilot are conducted to verify the performance of the proposed framework.