 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuery-Kontext: An Unified Multimodal Model for Image Generation and Editing
Sep 30, 2025
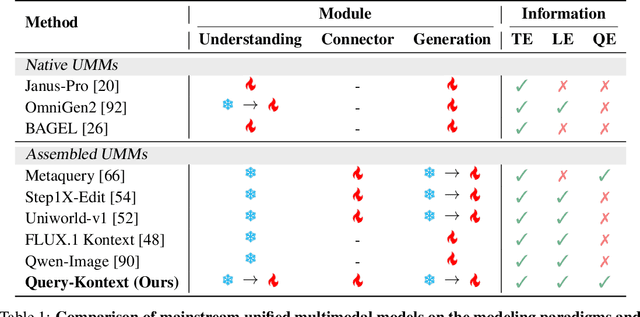
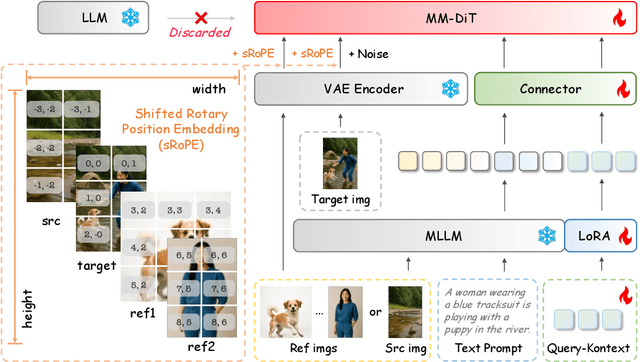
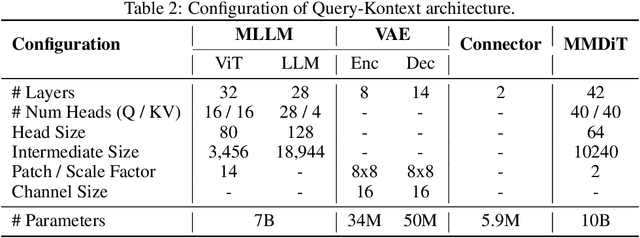
Unified Multimodal Models (UMMs) have demonstrated remarkable performance in text-to-image generation (T2I) and editing (TI2I), whether instantiated as assembled unified frameworks which couple powerful vision-language model (VLM) with diffusion-based generator, or as naive Unified Multimodal Models with an early fusion of understanding and generation modalities. We contend that in current unified frameworks, the crucial capability of multimodal generative reasoning which encompasses instruction understanding, grounding, and image referring for identity preservation and faithful reconstruction, is intrinsically entangled with high-fidelity synthesis. In this work, we introduce Query-Kontext, a novel approach that bridges the VLM and diffusion model via a multimodal ``kontext'' composed of semantic cues and coarse-grained image conditions encoded from multimodal inputs. This design delegates the complex ability of multimodal generative reasoning to powerful VLM while reserving diffusion model's role for high-quality visual synthesis. To achieve this, we propose a three-stage progressive training strategy. First, we connect the VLM to a lightweight diffusion head via multimodal kontext tokens to unleash the VLM's generative reasoning ability. Second, we scale this head to a large, pre-trained diffusion model to enhance visual detail and realism. Finally, we introduce a low-level image encoder to improve image fidelity and perform instruction tuning on downstream tasks. Furthermore, we build a comprehensive data pipeline integrating real, synthetic, and open-source datasets, covering diverse multimodal reference-to-image scenarios, including image generation, instruction-driven editing, customized generation, and multi-subject composition. Experiments show that our approach matches strong unified baselines and even outperforms task-specific state-of-the-art methods in several cases.
iDiT-HOI: Inpainting-based Hand Object Interaction Reenactment via Video Diffusion Transformer
Jun 15, 2025Digital human video generation is gaining traction in fields like education and e-commerce, driven by advancements in head-body animation and lip-syncing technologies. However, realistic Hand-Object Interaction (HOI) - the complex dynamics between human hands and objects - continues to pose challenges. Generating natural and believable HOI reenactments is difficult due to issues such as occlusion between hands and objects, variations in object shapes and orientations, and the necessity for precise physical interactions, and importantly, the ability to generalize to unseen humans and objects. This paper presents a novel framework iDiT-HOI that enables in-the-wild HOI reenactment generation. Specifically, we propose a unified inpainting-based token process method, called Inp-TPU, with a two-stage video diffusion transformer (DiT) model. The first stage generates a key frame by inserting the designated object into the hand region, providing a reference for subsequent frames. The second stage ensures temporal coherence and fluidity in hand-object interactions. The key contribution of our method is to reuse the pretrained model's context perception capabilities without introducing additional parameters, enabling strong generalization to unseen objects and scenarios, and our proposed paradigm naturally supports long video generation. Comprehensive evaluations demonstrate that our approach outperforms existing methods, particularly in challenging real-world scenes, offering enhanced realism and more seamless hand-object interactions.
AudCast: Audio-Driven Human Video Generation by Cascaded Diffusion Transformers
Mar 25, 2025
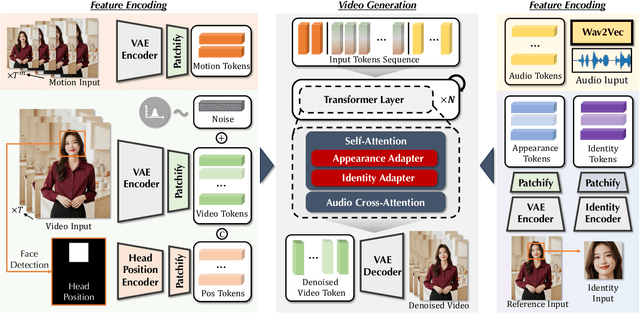
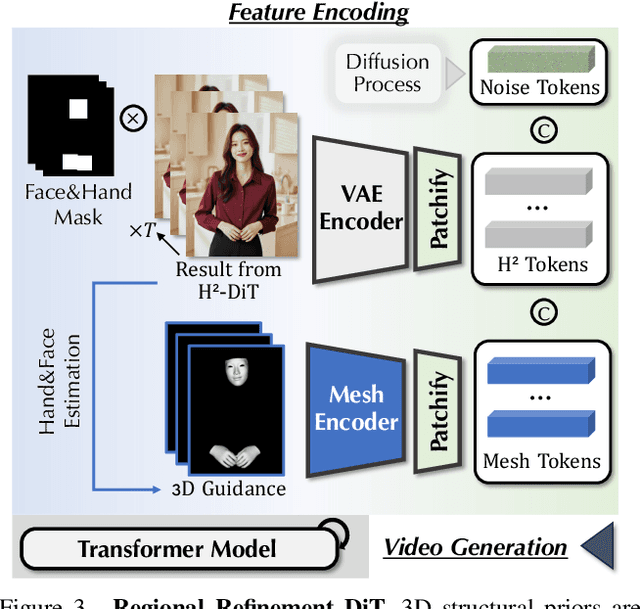
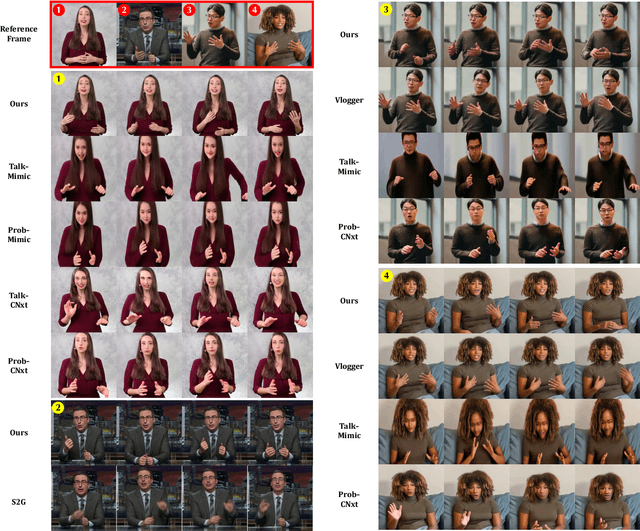
Despite the recent progress of audio-driven video generation, existing methods mostly focus on driving facial movements, leading to non-coherent head and body dynamics. Moving forward, it is desirable yet challenging to generate holistic human videos with both accurate lip-sync and delicate co-speech gestures w.r.t. given audio. In this work, we propose AudCast, a generalized audio-driven human video generation framework adopting a cascade Diffusion-Transformers (DiTs) paradigm, which synthesizes holistic human videos based on a reference image and a given audio. 1) Firstly, an audio-conditioned Holistic Human DiT architecture is proposed to directly drive the movements of any human body with vivid gesture dynamics. 2) Then to enhance hand and face details that are well-knownly difficult to handle, a Regional Refinement DiT leverages regional 3D fitting as the bridge to reform the signals, producing the final results. Extensive experiments demonstrate that our framework generates high-fidelity audio-driven holistic human videos with temporal coherence and fine facial and hand details. Resources can be found at https://guanjz20.github.io/projects/AudCast.
Cosh-DiT: Co-Speech Gesture Video Synthesis via Hybrid Audio-Visual Diffusion Transformers
Mar 13, 2025Co-speech gesture video synthesis is a challenging task that requires both probabilistic modeling of human gestures and the synthesis of realistic images that align with the rhythmic nuances of speech. To address these challenges, we propose Cosh-DiT, a Co-speech gesture video system with hybrid Diffusion Transformers that perform audio-to-motion and motion-to-video synthesis using discrete and continuous diffusion modeling, respectively. First, we introduce an audio Diffusion Transformer (Cosh-DiT-A) to synthesize expressive gesture dynamics synchronized with speech rhythms. To capture upper body, facial, and hand movement priors, we employ vector-quantized variational autoencoders (VQ-VAEs) to jointly learn their dependencies within a discrete latent space. Then, for realistic video synthesis conditioned on the generated speech-driven motion, we design a visual Diffusion Transformer (Cosh-DiT-V) that effectively integrates spatial and temporal contexts. Extensive experiments demonstrate that our framework consistently generates lifelike videos with expressive facial expressions and natural, smooth gestures that align seamlessly with speech.
Mulberry: Empowering MLLM with o1-like Reasoning and Reflection via Collective Monte Carlo Tree Search
Dec 24, 2024



In this work, we aim to develop an MLLM that understands and solves questions by learning to create each intermediate step of the reasoning involved till the final answer. To this end, we propose Collective Monte Carlo Tree Search (CoMCTS), a new learning-to-reason method for MLLMs, which introduces the concept of collective learning into ``tree search'' for effective and efficient reasoning-path searching and learning. The core idea of CoMCTS is to leverage collective knowledge from multiple models to collaboratively conjecture, search and identify effective reasoning paths toward correct answers via four iterative operations including Expansion, Simulation and Error Positioning, Backpropagation, and Selection. Using CoMCTS, we construct Mulberry-260k, a multimodal dataset with a tree of rich, explicit and well-defined reasoning nodes for each question. With Mulberry-260k, we perform collective SFT to train our model, Mulberry, a series of MLLMs with o1-like step-by-step Reasoning and Reflection capabilities. Extensive experiments demonstrate the superiority of our proposed methods on various benchmarks. Code will be available at https://github.com/HJYao00/Mulberry
Splatter-360: Generalizable 360$^{\circ}$ Gaussian Splatting for Wide-baseline Panoramic Images
Dec 09, 2024Wide-baseline panoramic images are frequently used in applications like VR and simulations to minimize capturing labor costs and storage needs. However, synthesizing novel views from these panoramic images in real time remains a significant challenge, especially due to panoramic imagery's high resolution and inherent distortions. Although existing 3D Gaussian splatting (3DGS) methods can produce photo-realistic views under narrow baselines, they often overfit the training views when dealing with wide-baseline panoramic images due to the difficulty in learning precise geometry from sparse 360$^{\circ}$ views. This paper presents \textit{Splatter-360}, a novel end-to-end generalizable 3DGS framework designed to handle wide-baseline panoramic images. Unlike previous approaches, \textit{Splatter-360} performs multi-view matching directly in the spherical domain by constructing a spherical cost volume through a spherical sweep algorithm, enhancing the network's depth perception and geometry estimation. Additionally, we introduce a 3D-aware bi-projection encoder to mitigate the distortions inherent in panoramic images and integrate cross-view attention to improve feature interactions across multiple viewpoints. This enables robust 3D-aware feature representations and real-time rendering capabilities. Experimental results on the HM3D~\cite{hm3d} and Replica~\cite{replica} demonstrate that \textit{Splatter-360} significantly outperforms state-of-the-art NeRF and 3DGS methods (e.g., PanoGRF, MVSplat, DepthSplat, and HiSplat) in both synthesis quality and generalization performance for wide-baseline panoramic images. Code and trained models are available at \url{https://3d-aigc.github.io/Splatter-360/}.
TALK-Act: Enhance Textural-Awareness for 2D Speaking Avatar Reenactment with Diffusion Model
Oct 14, 2024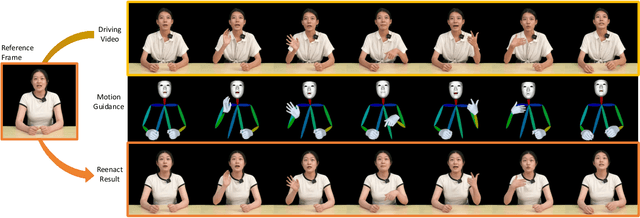

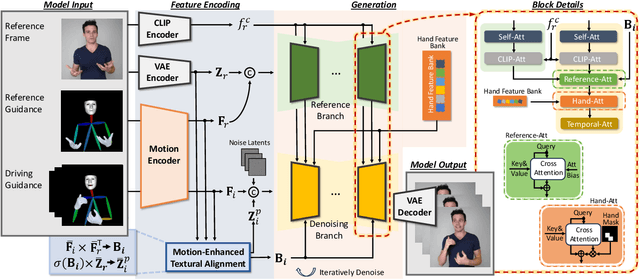

Recently, 2D speaking avatars have increasingly participated in everyday scenarios due to the fast development of facial animation techniques. However, most existing works neglect the explicit control of human bodies. In this paper, we propose to drive not only the faces but also the torso and gesture movements of a speaking figure. Inspired by recent advances in diffusion models, we propose the Motion-Enhanced Textural-Aware ModeLing for SpeaKing Avatar Reenactment (TALK-Act) framework, which enables high-fidelity avatar reenactment from only short footage of monocular video. Our key idea is to enhance the textural awareness with explicit motion guidance in diffusion modeling. Specifically, we carefully construct 2D and 3D structural information as intermediate guidance. While recent diffusion models adopt a side network for control information injection, they fail to synthesize temporally stable results even with person-specific fine-tuning. We propose a Motion-Enhanced Textural Alignment module to enhance the bond between driving and target signals. Moreover, we build a Memory-based Hand-Recovering module to help with the difficulties in hand-shape preserving. After pre-training, our model can achieve high-fidelity 2D avatar reenactment with only 30 seconds of person-specific data. Extensive experiments demonstrate the effectiveness and superiority of our proposed framework. Resources can be found at https://guanjz20.github.io/projects/TALK-Act.
MonoFormer: One Transformer for Both Diffusion and Autoregression
Sep 24, 2024



Most existing multimodality methods use separate backbones for autoregression-based discrete text generation and diffusion-based continuous visual generation, or the same backbone by discretizing the visual data to use autoregression for both text and visual generation. In this paper, we propose to study a simple idea: share one transformer for both autoregression and diffusion. The feasibility comes from two main aspects: (i) Transformer is successfully applied to diffusion for visual generation, and (ii) transformer training for autoregression and diffusion is very similar, and the difference merely lies in that diffusion uses bidirectional attention mask and autoregression uses causal attention mask. Experimental results show that our approach achieves comparable image generation performance to current state-of-the-art methods as well as maintains the text generation capability. The project is publicly available at https://monoformer.github.io/.
ReSyncer: Rewiring Style-based Generator for Unified Audio-Visually Synced Facial Performer
Aug 06, 2024



Lip-syncing videos with given audio is the foundation for various applications including the creation of virtual presenters or performers. While recent studies explore high-fidelity lip-sync with different techniques, their task-orientated models either require long-term videos for clip-specific training or retain visible artifacts. In this paper, we propose a unified and effective framework ReSyncer, that synchronizes generalized audio-visual facial information. The key design is revisiting and rewiring the Style-based generator to efficiently adopt 3D facial dynamics predicted by a principled style-injected Transformer. By simply re-configuring the information insertion mechanisms within the noise and style space, our framework fuses motion and appearance with unified training. Extensive experiments demonstrate that ReSyncer not only produces high-fidelity lip-synced videos according to audio, but also supports multiple appealing properties that are suitable for creating virtual presenters and performers, including fast personalized fine-tuning, video-driven lip-syncing, the transfer of speaking styles, and even face swapping. Resources can be found at https://guanjz20.github.io/projects/ReSyncer.
XLD: A Cross-Lane Dataset for Benchmarking Novel Driving View Synthesis
Jun 27, 2024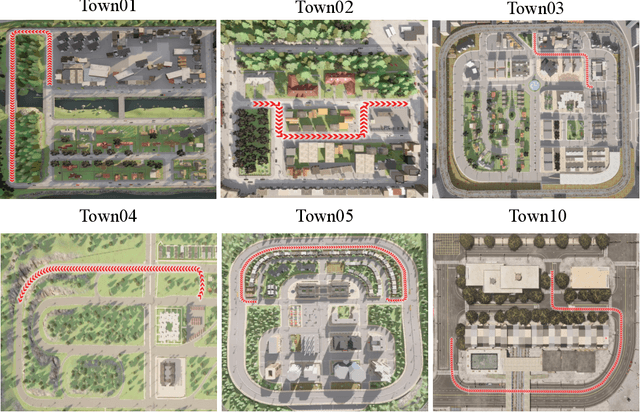
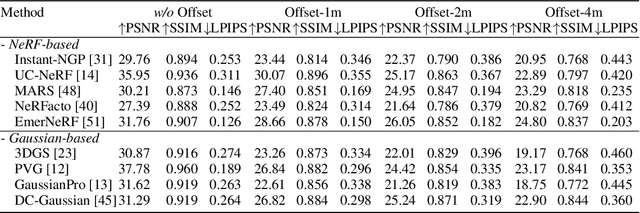
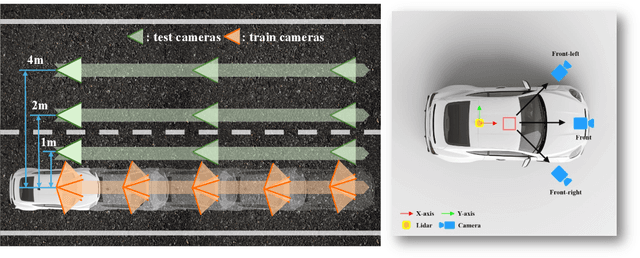
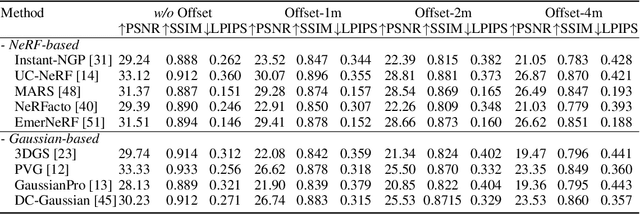
Thoroughly testing autonomy systems is crucial in the pursuit of safe autonomous driving vehicles. It necessitates creating safety-critical scenarios that go beyond what can be safely collected from real-world data, as many of these scenarios occur infrequently on public roads. However, the evaluation of most existing NVS methods relies on sporadic sampling of image frames from the training data, comparing the rendered images with ground truth images using metrics. Unfortunately, this evaluation protocol falls short of meeting the actual requirements in closed-loop simulations. Specifically, the true application demands the capability to render novel views that extend beyond the original trajectory (such as cross-lane views), which are challenging to capture in the real world. To address this, this paper presents a novel driving view synthesis dataset and benchmark specifically designed for autonomous driving simulations. This dataset is unique as it includes testing images captured by deviating from the training trajectory by 1-4 meters. It comprises six sequences encompassing various time and weather conditions. Each sequence contains 450 training images, 150 testing images, and their corresponding camera poses and intrinsic parameters. Leveraging this novel dataset, we establish the first realistic benchmark for evaluating existing NVS approaches under front-only and multi-camera settings. The experimental findings underscore the significant gap that exists in current approaches, revealing their inadequate ability to fulfill the demanding prerequisites of cross-lane or closed-loop simulation. Our dataset is released publicly at the project page: https://3d-aigc.github.io/XLD/.