 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXLD: A Cross-Lane Dataset for Benchmarking Novel Driving View Synthesis
Paper and Code
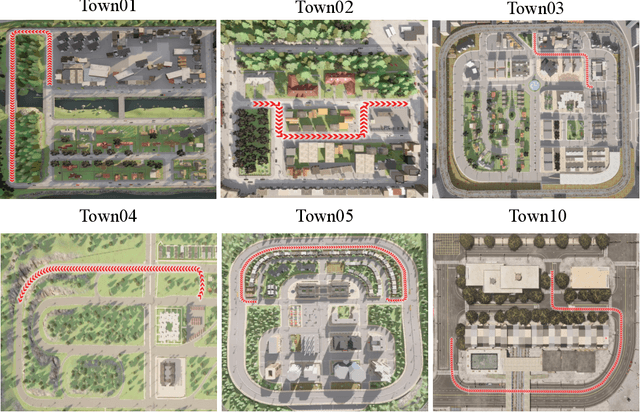
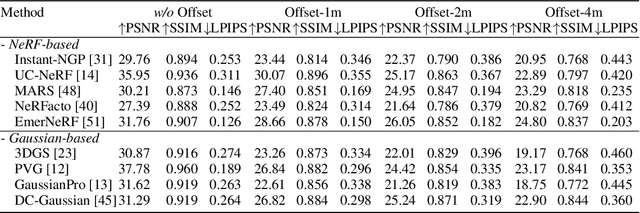
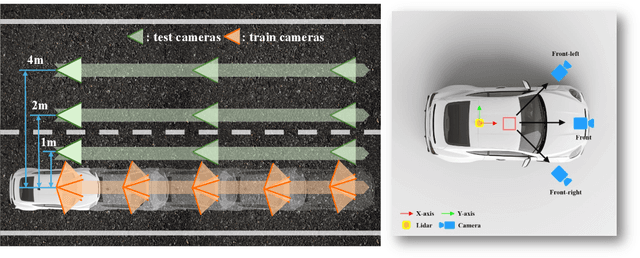
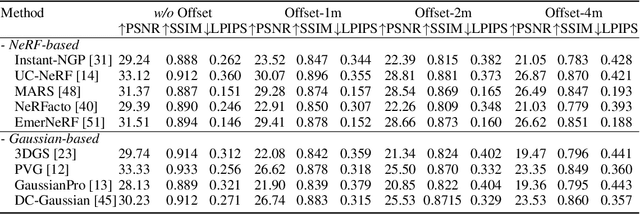
Thoroughly testing autonomy systems is crucial in the pursuit of safe autonomous driving vehicles. It necessitates creating safety-critical scenarios that go beyond what can be safely collected from real-world data, as many of these scenarios occur infrequently on public roads. However, the evaluation of most existing NVS methods relies on sporadic sampling of image frames from the training data, comparing the rendered images with ground truth images using metrics. Unfortunately, this evaluation protocol falls short of meeting the actual requirements in closed-loop simulations. Specifically, the true application demands the capability to render novel views that extend beyond the original trajectory (such as cross-lane views), which are challenging to capture in the real world. To address this, this paper presents a novel driving view synthesis dataset and benchmark specifically designed for autonomous driving simulations. This dataset is unique as it includes testing images captured by deviating from the training trajectory by 1-4 meters. It comprises six sequences encompassing various time and weather conditions. Each sequence contains 450 training images, 150 testing images, and their corresponding camera poses and intrinsic parameters. Leveraging this novel dataset, we establish the first realistic benchmark for evaluating existing NVS approaches under front-only and multi-camera settings. The experimental findings underscore the significant gap that exists in current approaches, revealing their inadequate ability to fulfill the demanding prerequisites of cross-lane or closed-loop simulation. Our dataset is released publicly at the project page: https://3d-aigc.github.io/XLD/.