 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMBench: A Comprehensive Benchmark on Memory Capability for Video World Models
May 30, 2026Recent advancements in video-based world models have demonstrated an unprecedented ability to synthesize high-fidelity visual sequences. However, a fundamental gap persists between visually plausible video generation and the functional requirements of a world model, particularly in maintaining a stable and reasonable internal state over extended temporal horizons. While existing benchmarks primarily emphasize visual quality, motion coherence, and text-video alignment, they largely overlook memory, the core capability of a world model to preserve consistency across long-term horizons and complex interactions. To address this gap, we present \textbf{MBench}, a comprehensive benchmark dedicated to quantifying and evaluating the memory capability of video world models. We systematically decompose the memory capability of video world models into three hierarchical and complementary core dimensions: entity consistency, environment consistency, and causal consistency, which are further refined into 12 quantifiable sub-dimensions for comprehensive characterization of long-term memory. Our benchmark is built upon rigorously curated real-captured long videos, and evaluated by rule-based quantitative matrices and VLM to enable objective and comprehensive consistency assessment. Extensive evaluations of mainstream state-of-the-art video world models reveal critical systemic limitations of existing methods in long-term state retention, providing a standardized benchmark and clear research direction to advance the field.
The WER Trap: Shattering the Illusion of Unified Tokens in Speech Language Models
May 28, 2026The pursuit of a "unified" discrete token for both speech understanding and generation has led the Speech Language Model (SLM) community to heavily rely on Word Error Rate (WER) -- the core metric for Whisper-style tokenizers -- as the definitive proxy for representation quality. This fosters the assumption that low-WER tokens inherently preserve the information necessary for intelligible acoustic synthesis. We argue this is fundamentally deceptive. While high-frequency tokens succeed in generation tasks due to implicit information leakage, isolating pure semantic information at ultra-low frame rates strips away the finegrained articulation and micro-dynamics essential for ODE-based generation. Empirically validating this requires extreme compression without sacrificing WER -- a methodological bottleneck, as standard fixed-stride downsampling arbitrarily truncates phonetic boundaries. To overcome this, we develop a dynamic compression tokenizer that intelligently aligns representations with semantic boundaries, achieving ultra-low frame rates with exceptionally low WER. Using these isolated "pure" semantic tokens, we expose the WER trap: when conditioning generative models -- even with oracle duration alignments -- the reconstructed speech suffers from severe articulation blur and is rendered acoustically unintelligible. Our findings demonstrate that semantic categorization rewarded by low WER is inherently orthogonal to the continuous phonetic trajectories required for synthesis, shattering the illusion of the unified token and advocating for explicitly decoupled speech representations.
Dual Prototype-Conditioned Diffusion Model for Scalable Multi-Class Unsupervised Anomaly Detection in Large Category Spaces
May 23, 2026Multi-class anomaly detection aims to build unified models across diverse product categories. However, as the number of categories grows, its performance often degrades due to increasingly complex and heterogeneous normal distributions. To address this challenge, we propose DPDiff-AD, a Dual Prototype-conditioned Diffusion model for large-scale multi-class Anomaly Detection. DPDiff-AD models heterogeneous normal distributions through complementary local and global prototypes. Local prototypes capture representative fine-grained structural patterns via nearest-prototype aggregation, while global prototypes regulate holistic feature geometry through optimal transport regularization. Together, these dual-scale representations define a structured normality space. This space is refined through diffusion-based reconstruction conditioned on both local and global prototypes via prototype-aware attention. By jointly leveraging dual prototypes during generation, DPDiff-AD achieves precise normality modeling, preserves structured separability as category cardinality grows, and enables scalable anomaly discrimination. Extensive experiments across five benchmarks demonstrate the effectiveness and scalability of DPDiff-AD. On the 160-category large-scale dataset, it improves image- and pixel-level AUROC by 5.3 and 2.9 points over the previous state-of-the-art method Dinomaly+, while maintaining stable performance as category cardinality increases.
StepAudio 2.5 Technical Report
May 22, 2026Unified audio-language modeling has emerged as a prominent trend in modern speech systems, promising to bring the reasoning capabilities of large language models to auditory tasks. However, existing unified foundations often struggle to match the depth of specialized systems across automatic speech recognition (ASR), text-to-speech synthesis (TTS), and realtime spoken interaction. Bridging this gap remains an open challenge. This report presents StepAudio 2.5, a unified audio-language foundation model that matches or exceeds specialized systems across all three capabilities. Rather than treating these tasks as architecturally distinct, we operate on the premise that once text and audio share a multimodal representational space, task specialization becomes a matter of operational regimes: data construction, optimization targets, and decoding constraints. Guided by this insight, we advance the post-training paradigm from standard supervised learning to task-tailored Reinforcement Learning from Human Feedback (RLHF), using it as the primary mechanism to define complex optimization targets. We leverage this RLHF-centric alignment, alongside specialized decoding, to shape a shared backbone into three distinct operational modes. Concretely, the ASR branch advances transcription efficiency via verifiable multi-token decoding; the TTS branch achieves controllable, expressive synthesis through preference-based RLHF and context-rich supervision; and the Realtime branch realizes low-latency, persona-consistent dialogue via generative reward modeling within an RLHF framework. On standard benchmarks, StepAudio 2.5 achieves state-of-the-art results across ASR, TTS, and Realtime, demonstrating that a singular audio-language foundation can successfully internalize the distinct deployment objectives of speech understanding, generation, and live interaction.
DuplexSLA: A Full-Duplex Spoken Language Model with Synchronized Speech, Language, and Action
May 20, 2026Recent advances in spoken dialogue language models have shifted from turn-based to full-duplex designs, where the model continuously listens to the user while generating responses. However, existing duplex backbones still lack a native channel for in-conversation planning and tool calling, leaving real-time agentic behaviour either tied to turn boundaries or relegated to an external cascade. We propose DuplexSLA, a native full-duplex Speech-Language-Action foundation model that decodes assistant audio together with a structured action stream on a shared 160 ms chunk timeline. DuplexSLA is built on a dual-stream three-channel formulation: a continuous user audio channel, a discrete assistant audio channel, and a rate-limited textual action channel, all decoded jointly by a single backbone, so that listening, speaking, planning, and tool calling unfold on one shared clock. Two capabilities define the model: (1) semantic-driven turn-taking control, where interruption, pause, and backchannel are handled inside the same backbone instead of by an external semantic VAD; and (2) in-conversation planning and tool calling, where planning text and structured tool calls are emitted on the action channel without halting assistant audio, so that multi-action and backchannel-triggered tool use are interleaved with ongoing speech. To evaluate these capabilities together, we further construct DuplexSLA-Bench, a duplex benchmark covering pause, interrupt, and backchannel turn-taking together with three styles of in-conversation tool calling. Our project page, interactive demos, and the DuplexSLA-Bench evaluation suite are publicly available at https://github.com/hyzhang24/DuplexSLA.
Step-Audio-R1.5 Technical Report
Apr 28, 2026Recent advancements in large audio language models have extended Chain-of-Thought (CoT) reasoning into the auditory domain, enabling models to tackle increasingly complex acoustic and spoken tasks. To elicit and sustain these extended reasoning chains, the prevailing paradigm -- driven by the success of text-based reasoning models -- overwhelmingly relies on Reinforcement Learning with Verified Rewards (RLVR). However, as models are strictly optimized to distill rich, continuous auditory contexts into isolated, verifiable text labels, a fundamental question arises: are we fostering true audio intelligence, or merely reducing a continuous sensory medium into a discrete puzzle? We identify this as the "verifiable reward trap." While RLVR yields remarkable scores on standardized objective benchmarks, it systematically degrades the real-world conversational feel of audio models. By prioritizing isolated correctness over acoustic nuance, RLVR reduces dynamic interactions to mechanical "answering machines," severely compromising prosodic naturalness, emotional continuity, and user immersion, particularly in long-turn dialogues. To bridge the gap between mechanical objective verification and genuine sensory empathy, we introduce Step-Audio-R1.5, marking a paradigm shift toward Reinforcement Learning from Human Feedback (RLHF) in audio reasoning. Comprehensive evaluations demonstrate that Step-Audio-R1.5 not only maintains robust analytical reasoning but profoundly transforms the interactive experience, redefining the boundaries of deeply immersive long-turn spoken dialogue.
The Silent Thought: Modeling Internal Cognition in Full-Duplex Spoken Dialogue Models via Latent Reasoning
Mar 18, 2026During conversational interactions, humans subconsciously engage in concurrent thinking while listening to a speaker. Although this internal cognitive processing may not always manifest as explicit linguistic structures, it is instrumental in formulating high-quality responses. Inspired by this cognitive phenomenon, we propose a novel Full-duplex LAtent and Internal Reasoning method named FLAIR that conducts latent thinking simultaneously with speech perception. Unlike conventional "thinking" mechanisms in NLP, which require post-hoc generation, our approach aligns seamlessly with spoken dialogue systems: during the user's speaking phase, it recursively feeds the latent embedding output from the previous step into the next step, enabling continuous reasoning that strictly adheres to causality without introducing additional latency. To enable this latent reasoning, we design an Evidence Lower Bound-based objective that supports efficient supervised finetuning via teacher forcing, circumventing the need for explicit reasoning annotations. Experiments demonstrate the effectiveness of this think-while-listening design, which achieves competitive results on a range of speech benchmarks. Furthermore, FLAIR robustly handles conversational dynamics and attains competitive performance on full-duplex interaction metrics.
DepFlow: Disentangled Speech Generation to Mitigate Semantic Bias in Depression Detection
Jan 01, 2026Speech is a scalable and non-invasive biomarker for early mental health screening. However, widely used depression datasets like DAIC-WOZ exhibit strong coupling between linguistic sentiment and diagnostic labels, encouraging models to learn semantic shortcuts. As a result, model robustness may be compromised in real-world scenarios, such as Camouflaged Depression, where individuals maintain socially positive or neutral language despite underlying depressive states. To mitigate this semantic bias, we propose DepFlow, a three-stage depression-conditioned text-to-speech framework. First, a Depression Acoustic Encoder learns speaker- and content-invariant depression embeddings through adversarial training, achieving effective disentanglement while preserving depression discriminability (ROC-AUC: 0.693). Second, a flow-matching TTS model with FiLM modulation injects these embeddings into synthesis, enabling control over depressive severity while preserving content and speaker identity. Third, a prototype-based severity mapping mechanism provides smooth and interpretable manipulation across the depression continuum. Using DepFlow, we construct a Camouflage Depression-oriented Augmentation (CDoA) dataset that pairs depressed acoustic patterns with positive/neutral content from a sentiment-stratified text bank, creating acoustic-semantic mismatches underrepresented in natural data. Evaluated across three depression detection architectures, CDoA improves macro-F1 by 9%, 12%, and 5%, respectively, consistently outperforming conventional augmentation strategies in depression Detection. Beyond enhancing robustness, DepFlow provides a controllable synthesis platform for conversational systems and simulation-based evaluation, where real clinical data remains limited by ethical and coverage constraints.
Lean4Physics: Comprehensive Reasoning Framework for College-level Physics in Lean4
Oct 30, 2025We present **Lean4PHYS**, a comprehensive reasoning framework for college-level physics problems in Lean4. **Lean4PHYS** includes *LeanPhysBench*, a college-level benchmark for formal physics reasoning in Lean4, which contains 200 hand-crafted and peer-reviewed statements derived from university textbooks and physics competition problems. To establish a solid foundation for formal reasoning in physics, we also introduce *PhysLib*, a community-driven repository containing fundamental unit systems and theorems essential for formal physics reasoning. Based on the benchmark and Lean4 repository we composed in **Lean4PHYS**, we report baseline results using major expert Math Lean4 provers and state-of-the-art closed-source models, with the best performance of DeepSeek-Prover-V2-7B achieving only 16% and Claude-Sonnet-4 achieving 35%. We also conduct a detailed analysis showing that our *PhysLib* can achieve an average improvement of 11.75% in model performance. This demonstrates the challenging nature of our *LeanPhysBench* and the effectiveness of *PhysLib*. To the best of our knowledge, this is the first study to provide a physics benchmark in Lean4.
Step-Audio 2 Technical Report
Jul 24, 2025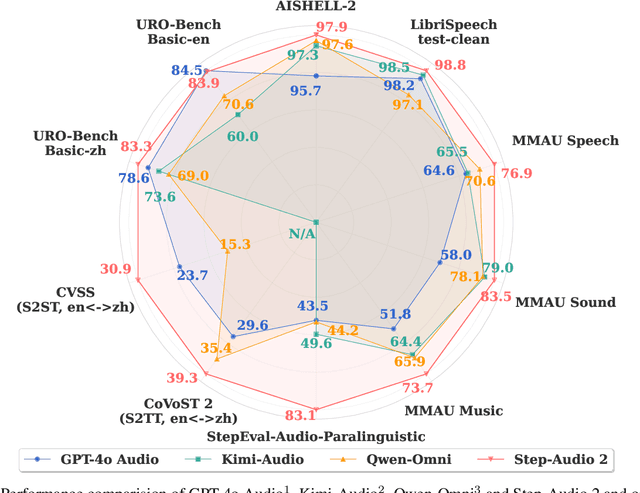

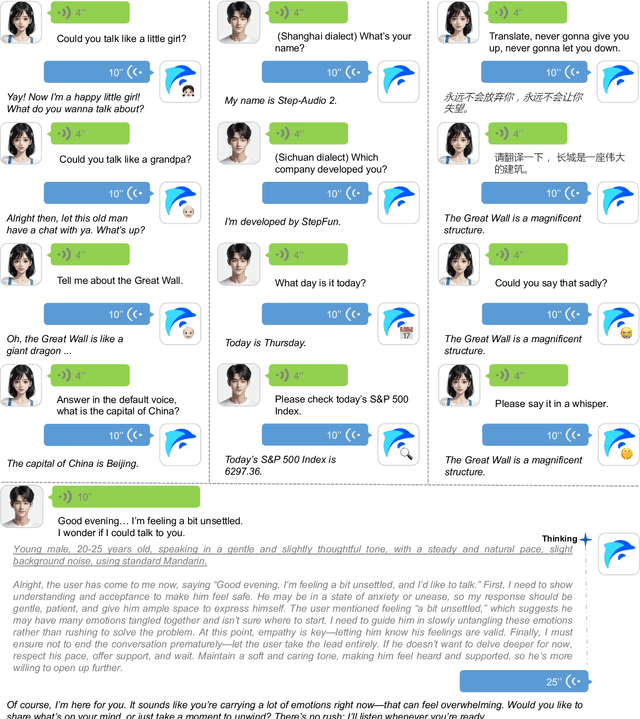

This paper presents Step-Audio 2, an end-to-end multi-modal large language model designed for industry-strength audio understanding and speech conversation. By integrating a latent audio encoder and reasoning-centric reinforcement learning (RL), Step-Audio 2 achieves promising performance in automatic speech recognition (ASR) and audio understanding. To facilitate genuine end-to-end speech conversation, Step-Audio 2 incorporates the generation of discrete audio tokens into language modeling, significantly enhancing its responsiveness to paralinguistic information such as speaking styles and emotions. To effectively leverage the rich textual and acoustic knowledge in real-world data, Step-Audio 2 integrates retrieval-augmented generation (RAG) and is able to call external tools such as web search to mitigate hallucination and audio search to switch timbres. Trained on millions of hours of speech and audio data, Step-Audio 2 delivers intelligence and expressiveness across diverse conversational scenarios. Evaluation results demonstrate that Step-Audio 2 achieves state-of-the-art performance on various audio understanding and conversational benchmarks compared to other open-source and commercial solutions. Please visit https://github.com/stepfun-ai/Step-Audio2 for more information.