 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMA-LoT: Multi-Agent Lean-based Long Chain-of-Thought Reasoning enhances Formal Theorem Proving
Mar 05, 2025



Solving mathematical problems using computer-verifiable languages like Lean has significantly impacted mathematical and computer science communities. State-of-the-art methods utilize single Large Language Models (LLMs) as agents or provers to either generate complete proof or perform tree searches. However, single-agent methods inherently lack a structured way to combine high-level reasoning in Natural Language (NL) with Formal Language (FL) verification feedback. To solve these issues, we propose MA-LoT: Multi-Agent Lean-based Long Chain-of-Thought framework, (to the best of our knowledge), the first multi-agent framework for Lean4 theorem proving that balance high-level NL reasoning and FL verification in Long CoT. Using this structured interaction, our approach enables deeper insights and long-term coherence in proof generation, with which past methods struggle. We do this by leveraging emergent formal reasoning ability in Long CoT using our novel LoT-Transfer Learning training-inference pipeline. Extensive experiments show that our framework achieves 54.51% accuracy rate on the Lean4 version of MiniF2F-Test dataset, largely outperforming GPT-4 (22.95%), single-agent tree search (InternLM-Step-Prover, 50.70%), and whole-proof generation (DeepSeek-Prover-v1.5, 48.36%) baselines. Furthermore, our findings highlight the potential of combining Long CoT with formal verification for a more insightful generation in a broader perspective.
Multipath Identification and Mitigation with FDA-MIMO Radar
Jul 25, 2024



In smart city development, the automatic detection of structures and vehicles within urban or suburban areas via array radar (airborne or vehicle platforms) becomes crucial. However, the inescapable multipath effect adversely affects the radar's capability to detect and track targets. Frequency Diversity Array (FDA)-MIMO radar offers innovative solutions in mitigating multipath due to its frequency flexibility and waveform diversity traits amongst array elements. Hence, utilizing FDA-MIMO radar, this research proposes a multipath discrimination and suppression strategy to augment target detection and suppress false alarms. The primary advancement is the transformation of conventional multipath suppression into a multipath recognition issue, thereby enabling multipath components from single-frame echo data to be separated without prior knowledge. By offsetting the distance steering vectors of different objects to be detected, the accurate spectral information corresponding to the current distance unit can be extracted during spatial spectrum estimation. The direct and multipath components are differentiated depending on whether the transmitting and receiving angles match. Additionally, to mitigate high-order multipath, the echo intensity of multipath components is reduced via joint optimization of array transmit weighting and frequency increment. The numerical results show that the proposed algorithm can identify multipath at different distances in both single-target and multi-target scenarios, which is superior to the general MIMO radar.
TheoremLlama: Transforming General-Purpose LLMs into Lean4 Experts
Jul 03, 2024Proving mathematical theorems using computer-verifiable formal languages like Lean significantly impacts mathematical reasoning. One approach to formal theorem proving involves generating complete proofs using Large Language Models (LLMs) based on Natural Language (NL) proofs. Similar methods have shown promising results in code generation. However, most modern LLMs exhibit suboptimal performance due to the scarcity of aligned NL and Formal Language (FL) theorem-proving data. This scarcity results in a paucity of methodologies for training LLMs and techniques to fully utilize their capabilities in composing formal proofs. To address the challenges, this paper proposes **TheoremLlama**, an end-to-end framework to train a general-purpose LLM to become a Lean4 expert. This framework encompasses NL-FL aligned dataset generation methods, training approaches for the LLM formal theorem prover, and techniques for LLM Lean4 proof writing. Using the dataset generation method, we provide *Open Bootstrapped Theorems* (OBT), an NL-FL aligned and bootstrapped dataset. A key innovation in this framework is the NL-FL bootstrapping method, where NL proofs are integrated into Lean4 code for training datasets, leveraging the NL reasoning ability of LLMs for formal reasoning. The **TheoremLlama** framework achieves cumulative accuracies of 36.48% and 33.61% on MiniF2F-Valid and Test datasets respectively, surpassing the GPT-4 baseline of 22.95% and 25.41%. We have also open-sourced our model checkpoints and generated dataset, and will soon make all the code publicly available.
On Smart Morphing Wing Aircraft Robust Adaptive Beamforming
Dec 22, 2023The smart morphing wing aircraft (SMWA) is a highly adaptable platform that can be widely used for intelligent warfare due to its real-time variable structure. The flexible conformal array (FCA) is a vital detection component of SMWA, when the deformation parameters of FCA are mismatched or array elements are mutually coupled, detection performance will be degraded. To overcome this problem and ensure robust beamforming for FCA, deviations in array control parameters (ACPs) and array perturbations, the effect of mutual coupling in addition to looking-direction errors should be considered. In this paper, we propose a robust adaptive beamforming (RAB) algorithm by reconstructing a multi-domain interference plus noise covariance matrix (INCM) and estimating steering vector (SV) for FCA. We first reconstruct the INCM using multi-domain processing, including ACP and angular domains. Then, SV estimation is executed through an optimization procedure. Experimental results have shown that the proposed beamformer outperforms existing beamformers in various mismatch conditions and harsh environments, such as high interference-to-noise ratios, and mutual coupling of antennas.
SIDE: Self-supervised Intermediate Domain Exploration for Source-free Domain Adaptation
Oct 13, 2023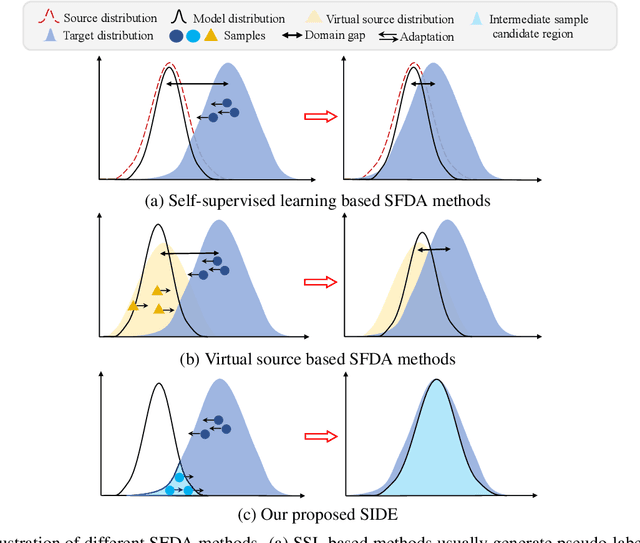
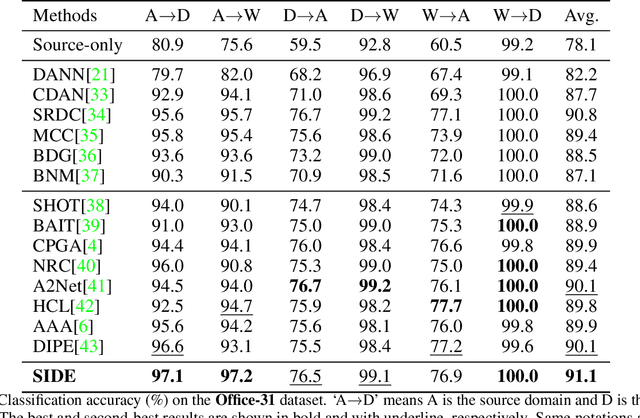
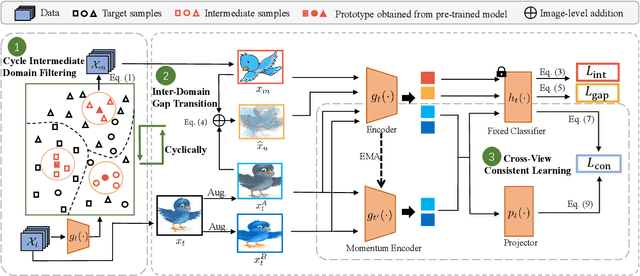
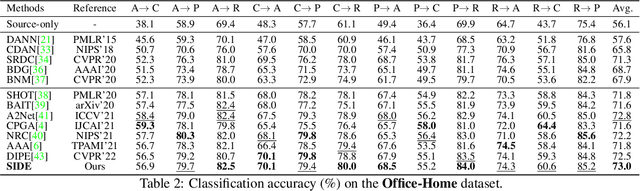
Domain adaptation aims to alleviate the domain shift when transferring the knowledge learned from the source domain to the target domain. Due to privacy issues, source-free domain adaptation (SFDA), where source data is unavailable during adaptation, has recently become very demanding yet challenging. Existing SFDA methods focus on either self-supervised learning of target samples or reconstruction of virtual source data. The former overlooks the transferable knowledge in the source model, whilst the latter introduces even more uncertainty. To address the above issues, this paper proposes self-supervised intermediate domain exploration (SIDE) that effectively bridges the domain gap with an intermediate domain, where samples are cyclically filtered out in a self-supervised fashion. First, we propose cycle intermediate domain filtering (CIDF) to cyclically select intermediate samples with similar distributions over source and target domains. Second, with the aid of those intermediate samples, an inter-domain gap transition (IDGT) module is developed to mitigate possible distribution mismatches between the source and target data. Finally, we introduce cross-view consistency learning (CVCL) to maintain the intrinsic class discriminability whilst adapting the model to the target domain. Extensive experiments on three popular benchmarks, i.e. Office-31, Office-Home and VisDA-C, show that our proposed SIDE achieves competitive performance against state-of-the-art methods.