 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnyMod-LLVE: Low-Light Video Enhancement with Modality-Agnostic Inference
Jun 09, 2026Low-light video enhancement (LLVE) remains a challenging task due to severe information degradation under low-illumination conditions. Recent multimodal approaches have significantly improved enhancement performance by incorporating auxiliary modalities, such as event streams and infrared images. However, these methods typically assume the availability of these modalities at inference, which is often not feasible in real-world scenarios. To solve this problem, in this work, we propose AMNet, a unified multimodal framework for LLVE, to support flexible modality-agnostic inference, where auxiliary modalities may be unavailable. To address the issue of modality absence, we introduce a Spatial-Spectral Dual-Gated Translator that learns the correspondence between auxiliary modalities and RGB inputs, producing implicit auxiliary representations to support the robust enhancement. Additionally, to fully facilitate the learning of cross-modal correspondence, we conduct large-scale multimodal pretraining based on the RGB-only dataset with synthetic auxiliary modalities. Extensive experiments demonstrate that AMNet could handle arbitrary inference-time modality combinations and exhibits superior performance for LLVE under modality absence conditions. Code and models are available on the project page.
Right Makes Might: Aligning Verified Hidden States Empowers RL Reasoning
Jun 02, 2026Reinforcement Learning from Verifiable Rewards (RLVR) has become the dominant approach for improving mathematical reasoning in large language models, yet current methods reduce each correct rollout to a single reward bit, ignoring the geometric structure shared among their hidden states. Investigating this structure, we find that at the anchor token (the position immediately before the answer marker), correct rollouts converge naturally because they must produce the same answer (cosine similarity ~0.84), yet each retains residual variance from its unique reasoning path. Encouraging full alignment at this point pushes the model to extract a unified "correct decision" representation, reducing sensitivity to which reasoning path was taken. Based on this observation, we propose Hidden-Align, an auxiliary loss function that aligns the last-layer hidden states of correct rollouts at the anchor token during RL training, with zero overhead in both training and inference. On eight mathematical reasoning benchmarks, Hidden-Align improves average pass@1 over the DAPO baseline by 3.8, 6.2, and 5.4 percentage points on Qwen3-1.7B, 4B, and 14B respectively, with consistent pass@k gains across all three scales, supported by ablations on loss type, anchor position, layer depth, and loss weight.
InfoMem: Training Long-Context Memory Agents with Answer-Conditioned Information Gain
Jun 02, 2026Long-context tasks require LLMs to identify and preserve answer-relevant information from large contexts. Chunk-wise memory agents address this issue by sequentially reading document chunks, updating a compact memory, and generating the final answer from the accumulated memory. However, existing RL-based chunk-wise agents either rely on sparse final-answer rewards or use lexical intermediate rewards for memory and retrieval actions. These signals supervise task success or local overlap, but do not directly evaluate whether the final memory supports the ground-truth answer. We propose InfoMem, a reward mechanism for training chunk-wise memory agents that evaluates final-memory utility using answer-conditioned information. InfoMem measures how much the final memory increases the model's per-token log-likelihood of the ground-truth answer. To stabilize RL optimization, InfoMem applies this signal only to successful trajectories and normalizes it before reward composition. Under the same GRPO framework and training budget, InfoMem improves long-context memory-agent performance over comparable memory-agent RL baselines. Analyses show that effective final-memory rewards should operate on successful trajectories, be normalized before reward composition, and be conditioned on the answer rather than the query. Our code is available at https://github.com/GenSouKa1/InfoMem.
CiQi-Agent: Aligning Vision, Tools and Aesthetics in Multimodal Agent for Cultural Reasoning on Chinese Porcelains
Mar 30, 2026The connoisseurship of antique Chinese porcelain demands extensive historical expertise, material understanding, and aesthetic sensitivity, making it difficult for non-specialists to engage. To democratize cultural-heritage understanding and assist expert connoisseurship, we introduce CiQi-Agent -- a domain-specific Porcelain Connoisseurship Agent for intelligent analysis of antique Chinese porcelain. CiQi-Agent supports multi-image porcelain inputs and enables vision tool invocation and multimodal retrieval-augmented generation, performing fine-grained connoisseurship analysis across six attributes: dynasty, reign period, kiln site, glaze color, decorative motif, and vessel shape. Beyond attribute classification, it captures subtle visual details, retrieves relevant domain knowledge, and integrates visual and textual evidence to produce coherent, explainable connoisseurship descriptions. To achieve this capability, we construct a large-scale, expert-annotated dataset CiQi-VQA, comprising 29,596 porcelain specimens, 51,553 images, and 557,940 visual question--answering pairs, and further establish a comprehensive benchmark CiQi-Bench aligned with the previously mentioned six attributes. CiQi-Agent is trained through supervised fine-tuning, reinforcement learning, and a tool-augmented reasoning framework that integrates two categories of tools: a vision tool and multimodal retrieval tools. Experimental results show that CiQi-Agent (7B) outperforms all competitive open- and closed-source models across all six attributes on CiQi-Bench, achieving on average 12.2\% higher accuracy than GPT-5. The model and dataset have been released and are publicly available at https://huggingface.co/datasets/SII-Monument-Valley/CiQi-VQA.
Project Imaging-X: A Survey of 1000+ Open-Access Medical Imaging Datasets for Foundation Model Development
Mar 29, 2026Foundation models have demonstrated remarkable success across diverse domains and tasks, primarily due to the thrive of large-scale, diverse, and high-quality datasets. However, in the field of medical imaging, the curation and assembling of such medical datasets are highly challenging due to the reliance on clinical expertise and strict ethical and privacy constraints, resulting in a scarcity of large-scale unified medical datasets and hindering the development of powerful medical foundation models. In this work, we present the largest survey to date of medical image datasets, covering over 1,000 open-access datasets with a systematic catalog of their modalities, tasks, anatomies, annotations, limitations, and potential for integration. Our analysis exposes a landscape that is modest in scale, fragmented across narrowly scoped tasks, and unevenly distributed across organs and modalities, which in turn limits the utility of existing medical image datasets for developing versatile and robust medical foundation models. To turn fragmentation into scale, we propose a metadata-driven fusion paradigm (MDFP) that integrates public datasets with shared modalities or tasks, thereby transforming multiple small data silos into larger, more coherent resources. Building on MDFP, we release an interactive discovery portal that enables end-to-end, automated medical image dataset integration, and compile all surveyed datasets into a unified, structured table that clearly summarizes their key characteristics and provides reference links, offering the community an accessible and comprehensive repository. By charting the current terrain and offering a principled path to dataset consolidation, our survey provides a practical roadmap for scaling medical imaging corpora, supporting faster data discovery, more principled dataset creation, and more capable medical foundation models.
RetroAgent: From Solving to Evolving via Retrospective Dual Intrinsic Feedback
Mar 12, 2026Standard reinforcement learning (RL) for large language model (LLM)-based agents typically optimizes extrinsic task-success rewards, prioritizing one-off task solving over continual adaptation. As a result, agents may converge to suboptimal policies due to limited exploration, and accumulated experience remains implicitly stored in model parameters, hindering efficient experiential learning. Inspired by humans' capacity for retrospective self-improvement, we introduce RetroAgent, an online RL framework that enables agents to master complex interactive environments not only by solving, but also by evolving under the joint guidance of extrinsic task-success rewards and retrospective dual intrinsic feedback. Concretely, RetroAgent features a hindsight self-reflection mechanism that produces: (1) intrinsic numerical feedback, which tracks incremental subtask completion relative to prior attempts to reward promising exploration; and (2) intrinsic language feedback, which distills reusable lessons into a memory buffer retrieved via our proposed Similarity & Utility-Aware Upper Confidence Bound (SimUtil-UCB) strategy, jointly balancing relevance, utility, and exploration. Extensive experiments across four challenging agentic tasks show that RetroAgent achieves state-of-the-art (SOTA) performance, substantially outperforming RL fine-tuning, memory-augmented RL, exploration-guided RL, and meta-RL methods -- e.g., exceeding Group Relative Policy Optimization (GRPO)-trained agents by +18.3% on ALFWorld, +15.4% on WebShop, +27.1% on Sokoban, and +8.9% on MineSweeper -- while maintaining strong test-time adaptation and out-of-distribution generalization.
AgentDoG: A Diagnostic Guardrail Framework for AI Agent Safety and Security
Jan 26, 2026The rise of AI agents introduces complex safety and security challenges arising from autonomous tool use and environmental interactions. Current guardrail models lack agentic risk awareness and transparency in risk diagnosis. To introduce an agentic guardrail that covers complex and numerous risky behaviors, we first propose a unified three-dimensional taxonomy that orthogonally categorizes agentic risks by their source (where), failure mode (how), and consequence (what). Guided by this structured and hierarchical taxonomy, we introduce a new fine-grained agentic safety benchmark (ATBench) and a Diagnostic Guardrail framework for agent safety and security (AgentDoG). AgentDoG provides fine-grained and contextual monitoring across agent trajectories. More Crucially, AgentDoG can diagnose the root causes of unsafe actions and seemingly safe but unreasonable actions, offering provenance and transparency beyond binary labels to facilitate effective agent alignment. AgentDoG variants are available in three sizes (4B, 7B, and 8B parameters) across Qwen and Llama model families. Extensive experimental results demonstrate that AgentDoG achieves state-of-the-art performance in agentic safety moderation in diverse and complex interactive scenarios. All models and datasets are openly released.
More Than One Teacher: Adaptive Multi-Guidance Policy Optimization for Diverse Exploration
Oct 02, 2025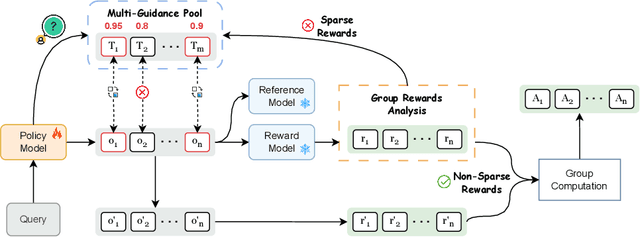
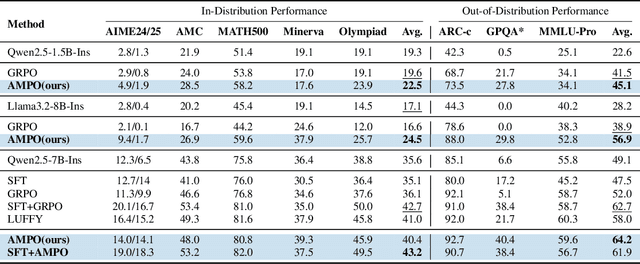

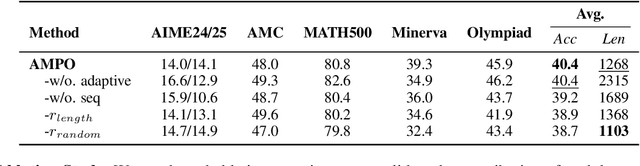
Reinforcement Learning with Verifiable Rewards (RLVR) is a promising paradigm for enhancing the reasoning ability in Large Language Models (LLMs). However, prevailing methods primarily rely on self-exploration or a single off-policy teacher to elicit long chain-of-thought (LongCoT) reasoning, which may introduce intrinsic model biases and restrict exploration, ultimately limiting reasoning diversity and performance. Drawing inspiration from multi-teacher strategies in knowledge distillation, we introduce Adaptive Multi-Guidance Policy Optimization (AMPO), a novel framework that adaptively leverages guidance from multiple proficient teacher models, but only when the on-policy model fails to generate correct solutions. This "guidance-on-demand" approach expands exploration while preserving the value of self-discovery. Moreover, AMPO incorporates a comprehension-based selection mechanism, prompting the student to learn from the reasoning paths that it is most likely to comprehend, thus balancing broad exploration with effective exploitation. Extensive experiments show AMPO substantially outperforms a strong baseline (GRPO), with a 4.3% improvement on mathematical reasoning tasks and 12.2% on out-of-distribution tasks, while significantly boosting Pass@k performance and enabling more diverse exploration. Notably, using four peer-sized teachers, our method achieves comparable results to approaches that leverage a single, more powerful teacher (e.g., DeepSeek-R1) with more data. These results demonstrate a more efficient and scalable path to superior reasoning and generalizability. Our code is available at https://github.com/SII-Enigma/AMPO.
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Aug 25, 2025



We introduce InternVL 3.5, a new family of open-source multimodal models that significantly advances versatility, reasoning capability, and inference efficiency along the InternVL series. A key innovation is the Cascade Reinforcement Learning (Cascade RL) framework, which enhances reasoning through a two-stage process: offline RL for stable convergence and online RL for refined alignment. This coarse-to-fine training strategy leads to substantial improvements on downstream reasoning tasks, e.g., MMMU and MathVista. To optimize efficiency, we propose a Visual Resolution Router (ViR) that dynamically adjusts the resolution of visual tokens without compromising performance. Coupled with ViR, our Decoupled Vision-Language Deployment (DvD) strategy separates the vision encoder and language model across different GPUs, effectively balancing computational load. These contributions collectively enable InternVL3.5 to achieve up to a +16.0\% gain in overall reasoning performance and a 4.05$\times$ inference speedup compared to its predecessor, i.e., InternVL3. In addition, InternVL3.5 supports novel capabilities such as GUI interaction and embodied agency. Notably, our largest model, i.e., InternVL3.5-241B-A28B, attains state-of-the-art results among open-source MLLMs across general multimodal, reasoning, text, and agentic tasks -- narrowing the performance gap with leading commercial models like GPT-5. All models and code are publicly released.
MDK12-Bench: A Comprehensive Evaluation of Multimodal Large Language Models on Multidisciplinary Exams
Aug 09, 2025Multimodal large language models (MLLMs), which integrate language and visual cues for problem-solving, are crucial for advancing artificial general intelligence (AGI). However, current benchmarks for measuring the intelligence of MLLMs suffer from limited scale, narrow coverage, and unstructured knowledge, offering only static and undifferentiated evaluations. To bridge this gap, we introduce MDK12-Bench, a large-scale multidisciplinary benchmark built from real-world K-12 exams spanning six disciplines with 141K instances and 6,225 knowledge points organized in a six-layer taxonomy. Covering five question formats with difficulty and year annotations, it enables comprehensive evaluation to capture the extent to which MLLMs perform over four dimensions: 1) difficulty levels, 2) temporal (cross-year) shifts, 3) contextual shifts, and 4) knowledge-driven reasoning. We propose a novel dynamic evaluation framework that introduces unfamiliar visual, textual, and question form shifts to challenge model generalization while improving benchmark objectivity and longevity by mitigating data contamination. We further evaluate knowledge-point reference-augmented generation (KP-RAG) to examine the role of knowledge in problem-solving. Key findings reveal limitations in current MLLMs in multiple aspects and provide guidance for enhancing model robustness, interpretability, and AI-assisted education.