 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgexGR: Efficient Generative Recommendation Serving at Scale
Dec 19, 2025Recommendation system delivers substantial economic benefits by providing personalized predictions. Generative recommendation (GR) integrates LLMs to enhance the understanding of long user-item sequences. Despite employing attention-based architectures, GR's workload differs markedly from that of LLM serving. GR typically processes long prompt while producing short, fixed-length outputs, yet the computational cost of each decode phase is especially high due to the large beam width. In addition, since the beam search involves a vast item space, the sorting overhead becomes particularly time-consuming. We propose xGR, a GR-oriented serving system that meets strict low-latency requirements under highconcurrency scenarios. First, xGR unifies the processing of prefill and decode phases through staged computation and separated KV cache. Second, xGR enables early sorting termination and mask-based item filtering with data structure reuse. Third, xGR reconstructs the overall pipeline to exploit multilevel overlap and multi-stream parallelism. Our experiments with real-world recommendation service datasets demonstrate that xGR achieves at least 3.49x throughput compared to the state-of-the-art baseline under strict latency constraints.
SafeWork-R1: Coevolving Safety and Intelligence under the AI-45$^{\circ}$ Law
Jul 24, 2025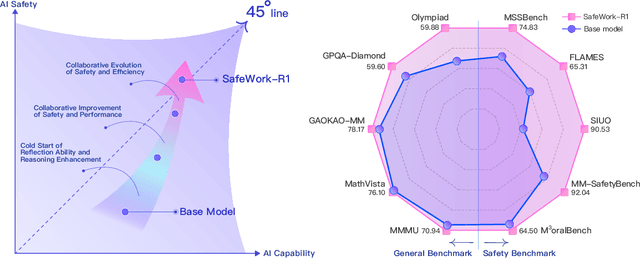
We introduce SafeWork-R1, a cutting-edge multimodal reasoning model that demonstrates the coevolution of capabilities and safety. It is developed by our proposed SafeLadder framework, which incorporates large-scale, progressive, safety-oriented reinforcement learning post-training, supported by a suite of multi-principled verifiers. Unlike previous alignment methods such as RLHF that simply learn human preferences, SafeLadder enables SafeWork-R1 to develop intrinsic safety reasoning and self-reflection abilities, giving rise to safety `aha' moments. Notably, SafeWork-R1 achieves an average improvement of $46.54\%$ over its base model Qwen2.5-VL-72B on safety-related benchmarks without compromising general capabilities, and delivers state-of-the-art safety performance compared to leading proprietary models such as GPT-4.1 and Claude Opus 4. To further bolster its reliability, we implement two distinct inference-time intervention methods and a deliberative search mechanism, enforcing step-level verification. Finally, we further develop SafeWork-R1-InternVL3-78B, SafeWork-R1-DeepSeek-70B, and SafeWork-R1-Qwen2.5VL-7B. All resulting models demonstrate that safety and capability can co-evolve synergistically, highlighting the generalizability of our framework in building robust, reliable, and trustworthy general-purpose AI.
BESA: Boosting Encoder Stealing Attack with Perturbation Recovery
Jun 05, 2025To boost the encoder stealing attack under the perturbation-based defense that hinders the attack performance, we propose a boosting encoder stealing attack with perturbation recovery named BESA. It aims to overcome perturbation-based defenses. The core of BESA consists of two modules: perturbation detection and perturbation recovery, which can be combined with canonical encoder stealing attacks. The perturbation detection module utilizes the feature vectors obtained from the target encoder to infer the defense mechanism employed by the service provider. Once the defense mechanism is detected, the perturbation recovery module leverages the well-designed generative model to restore a clean feature vector from the perturbed one. Through extensive evaluations based on various datasets, we demonstrate that BESA significantly enhances the surrogate encoder accuracy of existing encoder stealing attacks by up to 24.63\% when facing state-of-the-art defenses and combinations of multiple defenses.
OWMM-Agent: Open World Mobile Manipulation With Multi-modal Agentic Data Synthesis
Jun 04, 2025The rapid progress of navigation, manipulation, and vision models has made mobile manipulators capable in many specialized tasks. However, the open-world mobile manipulation (OWMM) task remains a challenge due to the need for generalization to open-ended instructions and environments, as well as the systematic complexity to integrate high-level decision making with low-level robot control based on both global scene understanding and current agent state. To address this complexity, we propose a novel multi-modal agent architecture that maintains multi-view scene frames and agent states for decision-making and controls the robot by function calling. A second challenge is the hallucination from domain shift. To enhance the agent performance, we further introduce an agentic data synthesis pipeline for the OWMM task to adapt the VLM model to our task domain with instruction fine-tuning. We highlight our fine-tuned OWMM-VLM as the first dedicated foundation model for mobile manipulators with global scene understanding, robot state tracking, and multi-modal action generation in a unified model. Through experiments, we demonstrate that our model achieves SOTA performance compared to other foundation models including GPT-4o and strong zero-shot generalization in real world. The project page is at https://github.com/HHYHRHY/OWMM-Agent
We Choose to Go to Space: Agent-driven Human and Multi-Robot Collaboration in Microgravity
Feb 22, 2024



We present SpaceAgents-1, a system for learning human and multi-robot collaboration (HMRC) strategies under microgravity conditions. Future space exploration requires humans to work together with robots. However, acquiring proficient robot skills and adept collaboration under microgravity conditions poses significant challenges within ground laboratories. To address this issue, we develop a microgravity simulation environment and present three typical configurations of intra-cabin robots. We propose a hierarchical heterogeneous multi-agent collaboration architecture: guided by foundation models, a Decision-Making Agent serves as a task planner for human-robot collaboration, while individual Skill-Expert Agents manage the embodied control of robots. This mechanism empowers the SpaceAgents-1 system to execute a range of intricate long-horizon HMRC tasks.