 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeASCoT: An Adaptive Self-Correction Chain-of-Thought Method for Late-Stage Fragility in LLMs
Aug 07, 2025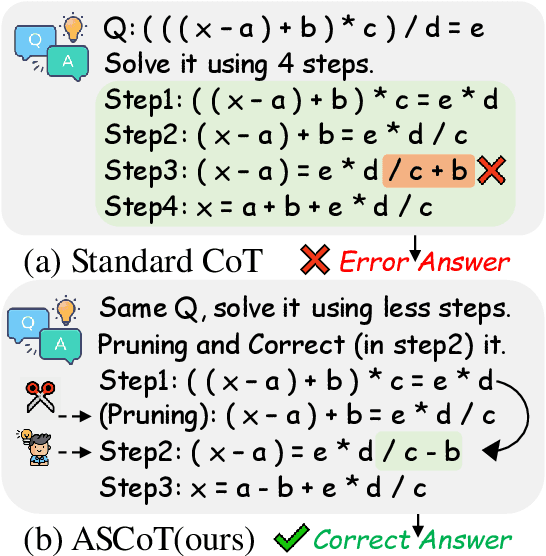
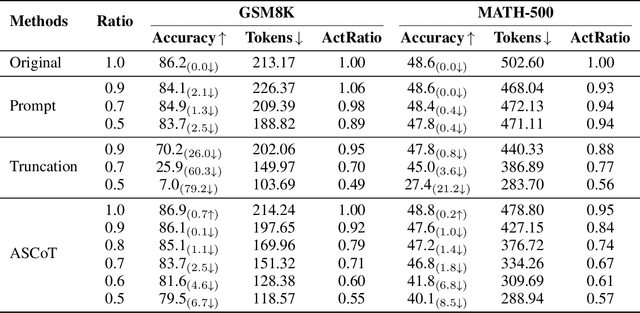
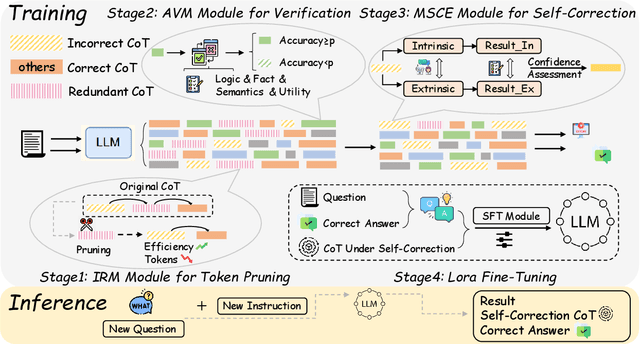
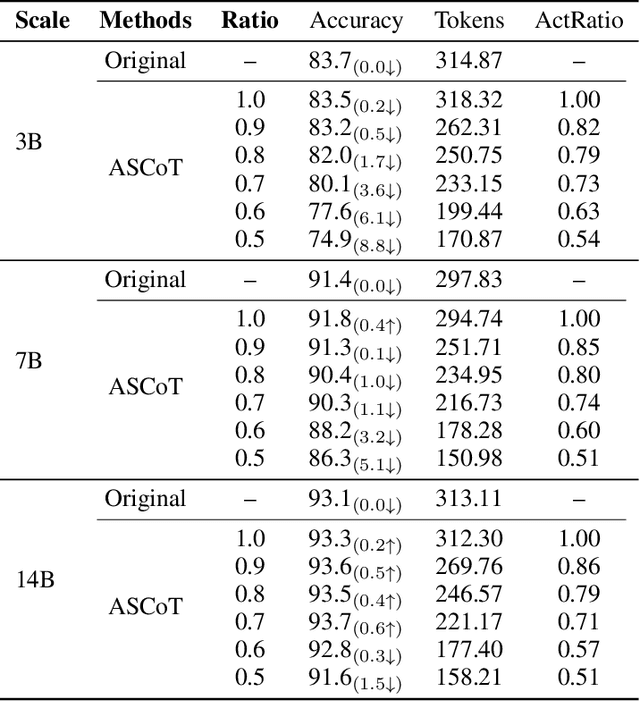
Chain-of-Thought (CoT) prompting has significantly advanced the reasoning capabilities of Large Language Models (LLMs), yet the reliability of these reasoning chains remains a critical challenge. A widely held "cascading failure" hypothesis suggests that errors are most detrimental when they occur early in the reasoning process. This paper challenges that assumption through systematic error-injection experiments, revealing a counter-intuitive phenomenon we term "Late-Stage Fragility": errors introduced in the later stages of a CoT chain are significantly more likely to corrupt the final answer than identical errors made at the beginning. To address this specific vulnerability, we introduce the Adaptive Self-Correction Chain-of-Thought (ASCoT) method. ASCoT employs a modular pipeline in which an Adaptive Verification Manager (AVM) operates first, followed by the Multi-Perspective Self-Correction Engine (MSCE). The AVM leverages a Positional Impact Score function I(k) that assigns different weights based on the position within the reasoning chains, addressing the Late-Stage Fragility issue by identifying and prioritizing high-risk, late-stage steps. Once these critical steps are identified, the MSCE applies robust, dual-path correction specifically to the failure parts. Extensive experiments on benchmarks such as GSM8K and MATH demonstrate that ASCoT achieves outstanding accuracy, outperforming strong baselines, including standard CoT. Our work underscores the importance of diagnosing specific failure modes in LLM reasoning and advocates for a shift from uniform verification strategies to adaptive, vulnerability-aware correction mechanisms.
Uncertainty-aware Reward Design Process
Jul 03, 2025Designing effective reward functions is a cornerstone of reinforcement learning (RL), yet it remains a challenging process due to the inefficiencies and inconsistencies inherent in conventional reward engineering methodologies. Recent advances have explored leveraging large language models (LLMs) to automate reward function design. However, their suboptimal performance in numerical optimization often yields unsatisfactory reward quality, while the evolutionary search paradigm demonstrates inefficient utilization of simulation resources, resulting in prohibitively lengthy design cycles with disproportionate computational overhead. To address these challenges, we propose the Uncertainty-aware Reward Design Process (URDP), a novel framework that integrates large language models to streamline reward function design and evaluation in RL environments. URDP quantifies candidate reward function uncertainty based on self-consistency analysis, enabling simulation-free identification of ineffective reward components while discovering novel reward components. Furthermore, we introduce uncertainty-aware Bayesian optimization (UABO), which incorporates uncertainty estimation to significantly enhance hyperparameter configuration efficiency. Finally, we construct a bi-level optimization architecture by decoupling the reward component optimization and the hyperparameter tuning. URDP orchestrates synergistic collaboration between the reward logic reasoning of the LLMs and the numerical optimization strengths of the Bayesian Optimization. We conduct a comprehensive evaluation of URDP across 35 diverse tasks spanning three benchmark environments. Our experimental results demonstrate that URDP not only generates higher-quality reward functions but also achieves significant improvements in the efficiency of automated reward design compared to existing approaches.
BFRFormer: Transformer-based generator for Real-World Blind Face Restoration
Feb 29, 2024Blind face restoration is a challenging task due to the unknown and complex degradation. Although face prior-based methods and reference-based methods have recently demonstrated high-quality results, the restored images tend to contain over-smoothed results and lose identity-preserved details when the degradation is severe. It is observed that this is attributed to short-range dependencies, the intrinsic limitation of convolutional neural networks. To model long-range dependencies, we propose a Transformer-based blind face restoration method, named BFRFormer, to reconstruct images with more identity-preserved details in an end-to-end manner. In BFRFormer, to remove blocking artifacts, the wavelet discriminator and aggregated attention module are developed, and spectral normalization and balanced consistency regulation are adaptively applied to address the training instability and over-fitting problem, respectively. Extensive experiments show that our method outperforms state-of-the-art methods on a synthetic dataset and four real-world datasets. The source code, Casia-Test dataset, and pre-trained models are released at https://github.com/s8Znk/BFRFormer.
We Choose to Go to Space: Agent-driven Human and Multi-Robot Collaboration in Microgravity
Feb 22, 2024



We present SpaceAgents-1, a system for learning human and multi-robot collaboration (HMRC) strategies under microgravity conditions. Future space exploration requires humans to work together with robots. However, acquiring proficient robot skills and adept collaboration under microgravity conditions poses significant challenges within ground laboratories. To address this issue, we develop a microgravity simulation environment and present three typical configurations of intra-cabin robots. We propose a hierarchical heterogeneous multi-agent collaboration architecture: guided by foundation models, a Decision-Making Agent serves as a task planner for human-robot collaboration, while individual Skill-Expert Agents manage the embodied control of robots. This mechanism empowers the SpaceAgents-1 system to execute a range of intricate long-horizon HMRC tasks.
Tree of Uncertain Thoughts Reasoning for Large Language Models
Sep 14, 2023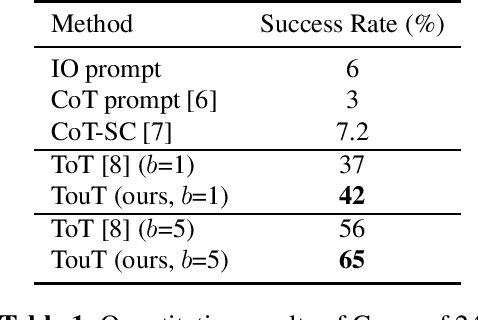
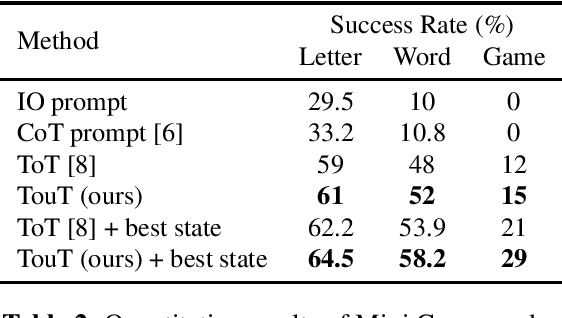
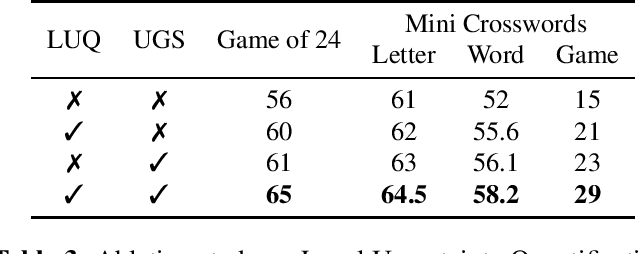
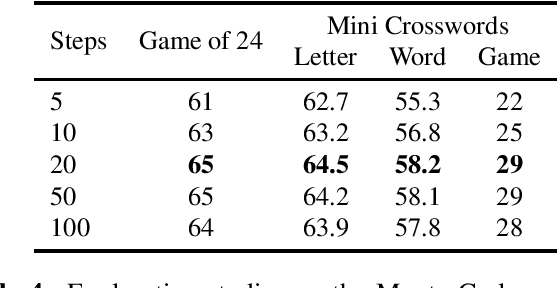
While the recently introduced Tree of Thoughts (ToT) has heralded advancements in allowing Large Language Models (LLMs) to reason through foresight and backtracking for global decision-making, it has overlooked the inherent local uncertainties in intermediate decision points or "thoughts". These local uncertainties, intrinsic to LLMs given their potential for diverse responses, remain a significant concern in the reasoning process. Addressing this pivotal gap, we introduce the Tree of Uncertain Thoughts (TouT) - a reasoning framework tailored for LLMs. Our TouT effectively leverages Monte Carlo Dropout to quantify uncertainty scores associated with LLMs' diverse local responses at these intermediate steps. By marrying this local uncertainty quantification with global search algorithms, TouT enhances the model's precision in response generation. We substantiate our approach with rigorous experiments on two demanding planning tasks: Game of 24 and Mini Crosswords. The empirical evidence underscores TouT's superiority over both ToT and chain-of-thought prompting methods.