 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapture-Calibrate-Coach: A Graph-Based Framework for Knowledge Monitoring Estimation and Adaptive Feedback
May 25, 2026Effective learning support requires understanding not only what learners know but also how accurately they perceive their own understanding. This metacognitive dimension, known as knowledge monitoring, fundamentally influences self-regulated learning, yet this dimension remains underexplored in current systems. This paper introduces the Capture-Calibrate-Coach (3C) framework for adaptive learning support. The Capture phase extracts learners' perceived knowledge states from open-ended self-reports to construct a heterogeneous graph linking learners and knowledge concepts. The Calibrate phase applies a heterogeneous graph neural network to infer latent perceived states for concepts not explicitly mentioned, enabling systematic knowledge monitoring assessment. The Coach phase classifies learners into five metacognitive patterns and delivers personalized feedback addressing both knowledge gaps and calibration errors. Evaluation with 684 students demonstrates 85.21% AUC in predicting latent perceived states, significantly outperforming baseline methods. A user study with 47 participants shows positive reception of feedback quality, with participants particularly valuing concrete feedback on knowledge gaps and actionable study guidance. These findings advance AI-based learning support toward metacognitive teammates that foster accurate self-awareness while supporting knowledge growth.
MMRareBench: A Rare-Disease Multimodal and Multi-Image Medical Benchmark
Apr 12, 2026Multimodal large language models (MLLMs) have advanced clinical tasks for common conditions, but their performance on rare diseases remains largely untested. In rare-disease scenarios, clinicians often lack prior clinical knowledge, forcing them to rely strictly on case-level evidence for clinical judgments. Existing benchmarks predominantly evaluate common-condition, single-image settings, leaving multimodal and multi-image evidence integration under rare-disease data scarcity systematically unevaluated. We introduce MMRareBench, to our knowledge the first rare-disease benchmark jointly evaluating multimodal and multi-image clinical capability across four workflow-aligned tracks: diagnosis, treatment planning, cross-image evidence alignment, and examination suggestion. The benchmark comprises 1,756 question-answer pairs with 7,958 associated medical images curated from PMC case reports, with Orphanet-anchored ontology alignment, track-specific leakage control, evidence-grounded annotations, and a two-level evaluation protocol. A systematic evaluation of 23 MLLMs reveals fragmented capability profiles and universally low treatment-planning performance, with medical-domain models trailing general-purpose MLLMs substantially on multi-image tracks despite competitive diagnostic scores. These patterns are consistent with a capacity dilution effect: medical fine-tuning can narrow the diagnostic gap but may erode the compositional multi-image capability that rare-disease evidence integration demands.
Project Imaging-X: A Survey of 1000+ Open-Access Medical Imaging Datasets for Foundation Model Development
Mar 29, 2026Foundation models have demonstrated remarkable success across diverse domains and tasks, primarily due to the thrive of large-scale, diverse, and high-quality datasets. However, in the field of medical imaging, the curation and assembling of such medical datasets are highly challenging due to the reliance on clinical expertise and strict ethical and privacy constraints, resulting in a scarcity of large-scale unified medical datasets and hindering the development of powerful medical foundation models. In this work, we present the largest survey to date of medical image datasets, covering over 1,000 open-access datasets with a systematic catalog of their modalities, tasks, anatomies, annotations, limitations, and potential for integration. Our analysis exposes a landscape that is modest in scale, fragmented across narrowly scoped tasks, and unevenly distributed across organs and modalities, which in turn limits the utility of existing medical image datasets for developing versatile and robust medical foundation models. To turn fragmentation into scale, we propose a metadata-driven fusion paradigm (MDFP) that integrates public datasets with shared modalities or tasks, thereby transforming multiple small data silos into larger, more coherent resources. Building on MDFP, we release an interactive discovery portal that enables end-to-end, automated medical image dataset integration, and compile all surveyed datasets into a unified, structured table that clearly summarizes their key characteristics and provides reference links, offering the community an accessible and comprehensive repository. By charting the current terrain and offering a principled path to dataset consolidation, our survey provides a practical roadmap for scaling medical imaging corpora, supporting faster data discovery, more principled dataset creation, and more capable medical foundation models.
"You've got a friend in me": Co-Designing a Peer Social Robot for Young Newcomers' Language and Cultural Learning
Mar 19, 2026Community literacy programs supporting young newcomer children in Canada face limited staffing and scarce one-to-one time, which constrains personalized English and cultural learning support. This paper reports on a co-design study with United for Literacy tutors that informed Maple, a table-top, peer-like Socially Assistive Robot (SAR) designed as a practice partner within tutor-mediated sessions. From shadowing and co-design interviews, we derived newcomer-specific requirements and added them in an integrated prototype that uses short story-based activities, multi-modal scaffolding (speech, facial feedback, gesture), and embedded quizzes that support attention while producing tutor-actionable formative signals. We contribute system design implications for tutor-in-the-loop SARs supporting language socialization in community settings and outline directions for child-centered evaluation in authentic programs.
Probing Scientific General Intelligence of LLMs with Scientist-Aligned Workflows
Dec 18, 2025Despite advances in scientific AI, a coherent framework for Scientific General Intelligence (SGI)-the ability to autonomously conceive, investigate, and reason across scientific domains-remains lacking. We present an operational SGI definition grounded in the Practical Inquiry Model (PIM: Deliberation, Conception, Action, Perception) and operationalize it via four scientist-aligned tasks: deep research, idea generation, dry/wet experiments, and experimental reasoning. SGI-Bench comprises over 1,000 expert-curated, cross-disciplinary samples inspired by Science's 125 Big Questions, enabling systematic evaluation of state-of-the-art LLMs. Results reveal gaps: low exact match (10--20%) in deep research despite step-level alignment; ideas lacking feasibility and detail; high code executability but low execution result accuracy in dry experiments; low sequence fidelity in wet protocols; and persistent multimodal comparative-reasoning challenges. We further introduce Test-Time Reinforcement Learning (TTRL), which optimizes retrieval-augmented novelty rewards at inference, enhancing hypothesis novelty without reference answer. Together, our PIM-grounded definition, workflow-centric benchmark, and empirical insights establish a foundation for AI systems that genuinely participate in scientific discovery.
Scaffolding Metacognition in Programming Education: Understanding Student-AI Interactions and Design Implications
Nov 06, 2025Generative AI tools such as ChatGPT now provide novice programmers with unprecedented access to instant, personalized support. While this holds clear promise, their influence on students' metacognitive processes remains underexplored. Existing work has largely focused on correctness and usability, with limited attention to whether and how students' use of AI assistants supports or bypasses key metacognitive processes. This study addresses that gap by analyzing student-AI interactions through a metacognitive lens in university-level programming courses. We examined more than 10,000 dialogue logs collected over three years, complemented by surveys of students and educators. Our analysis focused on how prompts and responses aligned with metacognitive phases and strategies. Synthesizing these findings across data sources, we distill design considerations for AI-powered coding assistants that aim to support rather than supplant metacognitive engagement. Our findings provide guidance for developing educational AI tools that strengthen students' learning processes in programming education.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
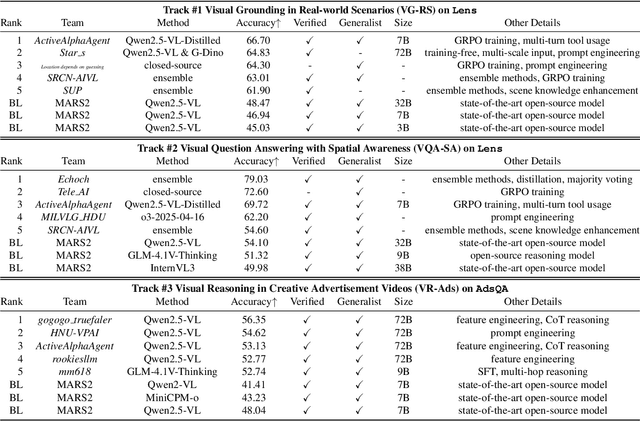

This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
A Survey of Scientific Large Language Models: From Data Foundations to Agent Frontiers
Aug 28, 2025



Scientific Large Language Models (Sci-LLMs) are transforming how knowledge is represented, integrated, and applied in scientific research, yet their progress is shaped by the complex nature of scientific data. This survey presents a comprehensive, data-centric synthesis that reframes the development of Sci-LLMs as a co-evolution between models and their underlying data substrate. We formulate a unified taxonomy of scientific data and a hierarchical model of scientific knowledge, emphasizing the multimodal, cross-scale, and domain-specific challenges that differentiate scientific corpora from general natural language processing datasets. We systematically review recent Sci-LLMs, from general-purpose foundations to specialized models across diverse scientific disciplines, alongside an extensive analysis of over 270 pre-/post-training datasets, showing why Sci-LLMs pose distinct demands -- heterogeneous, multi-scale, uncertainty-laden corpora that require representations preserving domain invariance and enabling cross-modal reasoning. On evaluation, we examine over 190 benchmark datasets and trace a shift from static exams toward process- and discovery-oriented assessments with advanced evaluation protocols. These data-centric analyses highlight persistent issues in scientific data development and discuss emerging solutions involving semi-automated annotation pipelines and expert validation. Finally, we outline a paradigm shift toward closed-loop systems where autonomous agents based on Sci-LLMs actively experiment, validate, and contribute to a living, evolving knowledge base. Collectively, this work provides a roadmap for building trustworthy, continually evolving artificial intelligence (AI) systems that function as a true partner in accelerating scientific discovery.
RetinaLogos: Fine-Grained Synthesis of High-Resolution Retinal Images Through Captions
May 19, 2025The scarcity of high-quality, labelled retinal imaging data, which presents a significant challenge in the development of machine learning models for ophthalmology, hinders progress in the field. To synthesise Colour Fundus Photographs (CFPs), existing methods primarily relying on predefined disease labels face significant limitations. However, current methods remain limited, thus failing to generate images for broader categories with diverse and fine-grained anatomical structures. To overcome these challenges, we first introduce an innovative pipeline that creates a large-scale, synthetic Caption-CFP dataset comprising 1.4 million entries, called RetinaLogos-1400k. Specifically, RetinaLogos-1400k uses large language models (LLMs) to describe retinal conditions and key structures, such as optic disc configuration, vascular distribution, nerve fibre layers, and pathological features. Furthermore, based on this dataset, we employ a novel three-step training framework, called RetinaLogos, which enables fine-grained semantic control over retinal images and accurately captures different stages of disease progression, subtle anatomical variations, and specific lesion types. Extensive experiments demonstrate state-of-the-art performance across multiple datasets, with 62.07% of text-driven synthetic images indistinguishable from real ones by ophthalmologists. Moreover, the synthetic data improves accuracy by 10%-25% in diabetic retinopathy grading and glaucoma detection, thereby providing a scalable solution to augment ophthalmic datasets.
LECTOR: Summarizing E-book Reading Content for Personalized Student Support
May 12, 2025Educational e-book platforms provide valuable information to teachers and researchers through two main sources: reading activity data and reading content data. While reading activity data is commonly used to analyze learning strategies and predict low-performing students, reading content data is often overlooked in these analyses. To address this gap, this study proposes LECTOR (Lecture slides and Topic Relationships), a model that summarizes information from reading content in a format that can be easily integrated with reading activity data. Our first experiment compared LECTOR to representative Natural Language Processing (NLP) models in extracting key information from 2,255 lecture slides, showing an average improvement of 5% in F1-score. These results were further validated through a human evaluation involving 28 students, which showed an average improvement of 21% in F1-score over a model predominantly used in current educational tools. Our second experiment compared reading preferences extracted by LECTOR with traditional reading activity data in predicting low-performing students using 600,712 logs from 218 students. The results showed a tendency to improve the predictive performance by integrating LECTOR. Finally, we proposed examples showing the potential application of the reading preferences extracted by LECTOR in designing personalized interventions for students.
* Published open-access in the International Journal of Artificial Intelligence in Education (IJAIED), see https://doi.org/10.1007/s40593-025-00478-6