 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMogao: An Omni Foundation Model for Interleaved Multi-Modal Generation
May 08, 2025Recent progress in unified models for image understanding and generation has been impressive, yet most approaches remain limited to single-modal generation conditioned on multiple modalities. In this paper, we present Mogao, a unified framework that advances this paradigm by enabling interleaved multi-modal generation through a causal approach. Mogao integrates a set of key technical improvements in architecture design, including a deep-fusion design, dual vision encoders, interleaved rotary position embeddings, and multi-modal classifier-free guidance, which allow it to harness the strengths of both autoregressive models for text generation and diffusion models for high-quality image synthesis. These practical improvements also make Mogao particularly effective to process interleaved sequences of text and images arbitrarily. To further unlock the potential of unified models, we introduce an efficient training strategy on a large-scale, in-house dataset specifically curated for joint text and image generation. Extensive experiments show that Mogao not only achieves state-of-the-art performance in multi-modal understanding and text-to-image generation, but also excels in producing high-quality, coherent interleaved outputs. Its emergent capabilities in zero-shot image editing and compositional generation highlight Mogao as a practical omni-modal foundation model, paving the way for future development and scaling the unified multi-modal systems.
Seedream 3.0 Technical Report
Apr 16, 2025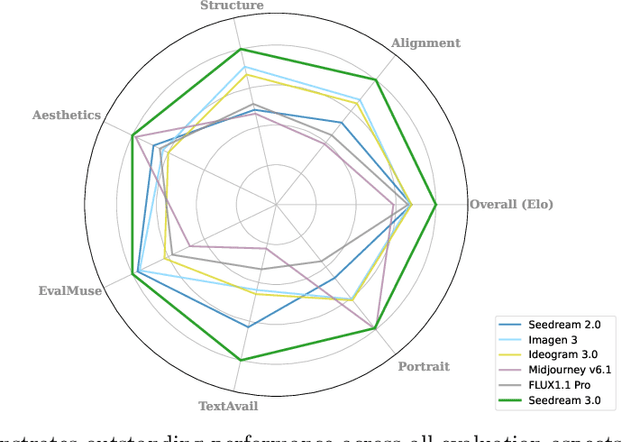


We present Seedream 3.0, a high-performance Chinese-English bilingual image generation foundation model. We develop several technical improvements to address existing challenges in Seedream 2.0, including alignment with complicated prompts, fine-grained typography generation, suboptimal visual aesthetics and fidelity, and limited image resolutions. Specifically, the advancements of Seedream 3.0 stem from improvements across the entire pipeline, from data construction to model deployment. At the data stratum, we double the dataset using a defect-aware training paradigm and a dual-axis collaborative data-sampling framework. Furthermore, we adopt several effective techniques such as mixed-resolution training, cross-modality RoPE, representation alignment loss, and resolution-aware timestep sampling in the pre-training phase. During the post-training stage, we utilize diversified aesthetic captions in SFT, and a VLM-based reward model with scaling, thereby achieving outputs that well align with human preferences. Furthermore, Seedream 3.0 pioneers a novel acceleration paradigm. By employing consistent noise expectation and importance-aware timestep sampling, we achieve a 4 to 8 times speedup while maintaining image quality. Seedream 3.0 demonstrates significant improvements over Seedream 2.0: it enhances overall capabilities, in particular for text-rendering in complicated Chinese characters which is important to professional typography generation. In addition, it provides native high-resolution output (up to 2K), allowing it to generate images with high visual quality.
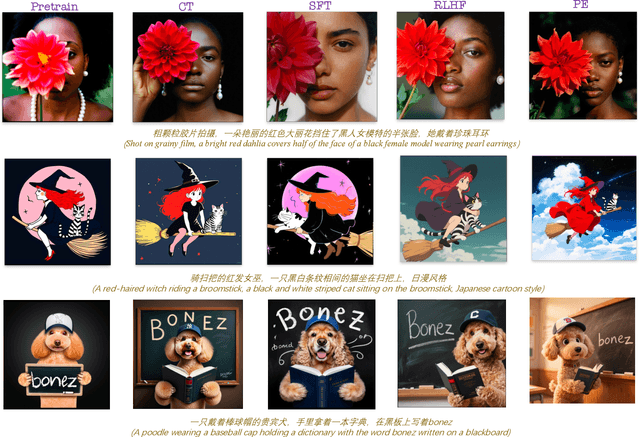
Seedream 2.0: A Native Chinese-English Bilingual Image Generation Foundation Model
Mar 10, 2025Rapid advancement of diffusion models has catalyzed remarkable progress in the field of image generation. However, prevalent models such as Flux, SD3.5 and Midjourney, still grapple with issues like model bias, limited text rendering capabilities, and insufficient understanding of Chinese cultural nuances. To address these limitations, we present Seedream 2.0, a native Chinese-English bilingual image generation foundation model that excels across diverse dimensions, which adeptly manages text prompt in both Chinese and English, supporting bilingual image generation and text rendering. We develop a powerful data system that facilitates knowledge integration, and a caption system that balances the accuracy and richness for image description. Particularly, Seedream is integrated with a self-developed bilingual large language model as a text encoder, allowing it to learn native knowledge directly from massive data. This enable it to generate high-fidelity images with accurate cultural nuances and aesthetic expressions described in either Chinese or English. Beside, Glyph-Aligned ByT5 is applied for flexible character-level text rendering, while a Scaled ROPE generalizes well to untrained resolutions. Multi-phase post-training optimizations, including SFT and RLHF iterations, further improve the overall capability. Through extensive experimentation, we demonstrate that Seedream 2.0 achieves state-of-the-art performance across multiple aspects, including prompt-following, aesthetics, text rendering, and structural correctness. Furthermore, Seedream 2.0 has been optimized through multiple RLHF iterations to closely align its output with human preferences, as revealed by its outstanding ELO score. In addition, it can be readily adapted to an instruction-based image editing model, such as SeedEdit, with strong editing capability that balances instruction-following and image consistency.
Decomposing Disease Descriptions for Enhanced Pathology Detection: A Multi-Aspect Vision-Language Matching Framework
Mar 12, 2024



Medical vision language pre-training (VLP) has emerged as a frontier of research, enabling zero-shot pathological recognition by comparing the query image with the textual descriptions for each disease. Due to the complex semantics of biomedical texts, current methods struggle to align medical images with key pathological findings in unstructured reports. This leads to the misalignment with the target disease's textual representation. In this paper, we introduce a novel VLP framework designed to dissect disease descriptions into their fundamental aspects, leveraging prior knowledge about the visual manifestations of pathologies. This is achieved by consulting a large language model and medical experts. Integrating a Transformer module, our approach aligns an input image with the diverse elements of a disease, generating aspect-centric image representations. By consolidating the matches from each aspect, we improve the compatibility between an image and its associated disease. Additionally, capitalizing on the aspect-oriented representations, we present a dual-head Transformer tailored to process known and unknown diseases, optimizing the comprehensive detection efficacy. Conducting experiments on seven downstream datasets, ours outperforms recent methods by up to 8.07% and 11.23% in AUC scores for seen and novel categories, respectively. Our code is released at \href{https://github.com/HieuPhan33/MAVL}{https://github.com/HieuPhan33/MAVL}.
BPKD: Boundary Privileged Knowledge Distillation For Semantic Segmentation
Jun 13, 2023Current approaches for knowledge distillation in semantic segmentation tend to adopt a holistic approach that treats all spatial locations equally. However, for dense prediction tasks, it is crucial to consider the knowledge representation for different spatial locations in a different manner. Furthermore, edge regions between adjacent categories are highly uncertain due to context information leakage, which is particularly pronounced for compact networks. To address this challenge, this paper proposes a novel approach called boundary-privileged knowledge distillation (BPKD). BPKD distills the knowledge of the teacher model's body and edges separately from the compact student model. Specifically, we employ two distinct loss functions: 1) Edge Loss, which aims to distinguish between ambiguous classes at the pixel level in edge regions. 2) Body Loss, which utilizes shape constraints and selectively attends to the inner-semantic regions. Our experiments demonstrate that the proposed BPKD method provides extensive refinements and aggregation for edge and body regions. Additionally, the method achieves state-of-the-art distillation performance for semantic segmentation on three popular benchmark datasets, highlighting its effectiveness and generalization ability. BPKD shows consistent improvements over various lightweight semantic segmentation structures. The code is available at \url{https://github.com/AkideLiu/BPKD}.
SegViTv2: Exploring Efficient and Continual Semantic Segmentation with Plain Vision Transformers
Jun 09, 2023We explore the capability of plain Vision Transformers (ViTs) for semantic segmentation using the encoder-decoder framework and introduce SegViTv2. In our work, we implement the decoder with the global attention mechanism inherent in ViT backbones and propose the lightweight Attention-to-Mask module that effectively converts the global attention map into semantic masks for high-quality segmentation results. Our decoder can outperform the most commonly-used decoder UpperNet in various ViT backbones while consuming only about 5\% of the computational cost. For the encoder, we address the concern of the relatively high computational cost in the ViT-based encoders and propose a Shrunk++ structure that incorporates edge-aware query-based down-sampling (EQD) and query-based up-sampling (QU) modules. The Shrunk++ structure reduces the computational cost of the encoder by up to $50\%$ while maintaining competitive performance. Furthermore, due to the flexibility of our ViT-based architecture, SegVit can be easily extended to semantic segmentation under the setting of continual learning, achieving nearly zero forgetting. Experiments show that our proposed SegViT outperforms recent segmentation methods on three popular benchmarks including ADE20k, COCO-Stuff-10k and PASCAL-Context datasets. The code is available through the following link: \url{https://github.com/zbwxp/SegVit}.
Group R-CNN for Weakly Semi-supervised Object Detection with Points
May 12, 2022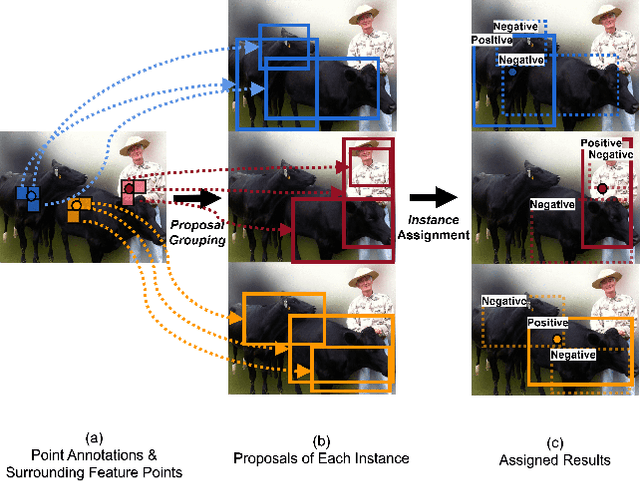
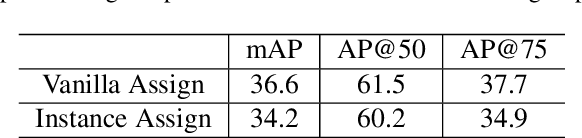
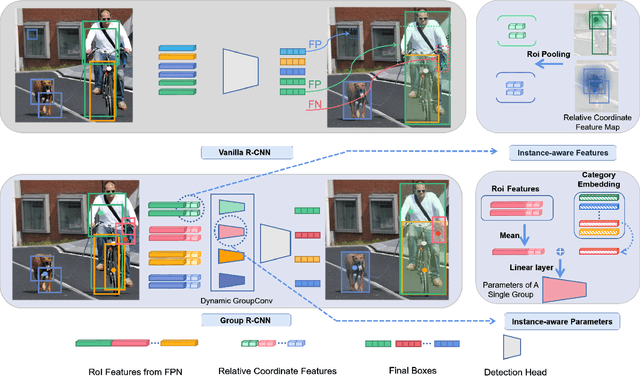
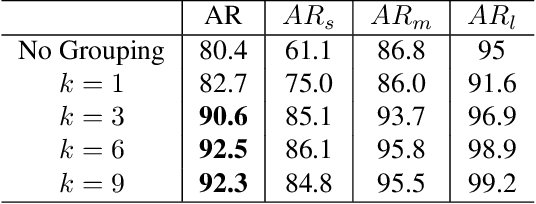
We study the problem of weakly semi-supervised object detection with points (WSSOD-P), where the training data is combined by a small set of fully annotated images with bounding boxes and a large set of weakly-labeled images with only a single point annotated for each instance. The core of this task is to train a point-to-box regressor on well-labeled images that can be used to predict credible bounding boxes for each point annotation. We challenge the prior belief that existing CNN-based detectors are not compatible with this task. Based on the classic R-CNN architecture, we propose an effective point-to-box regressor: Group R-CNN. Group R-CNN first uses instance-level proposal grouping to generate a group of proposals for each point annotation and thus can obtain a high recall rate. To better distinguish different instances and improve precision, we propose instance-level proposal assignment to replace the vanilla assignment strategy adopted in the original R-CNN methods. As naive instance-level assignment brings converging difficulty, we propose instance-aware representation learning which consists of instance-aware feature enhancement and instance-aware parameter generation to overcome this issue. Comprehensive experiments on the MS-COCO benchmark demonstrate the effectiveness of our method. Specifically, Group R-CNN significantly outperforms the prior method Point DETR by 3.9 mAP with 5% well-labeled images, which is the most challenging scenario. The source code can be found at https://github.com/jshilong/GroupRCNN
Pseudo-mask Matters in Weakly-supervised Semantic Segmentation
Sep 07, 2021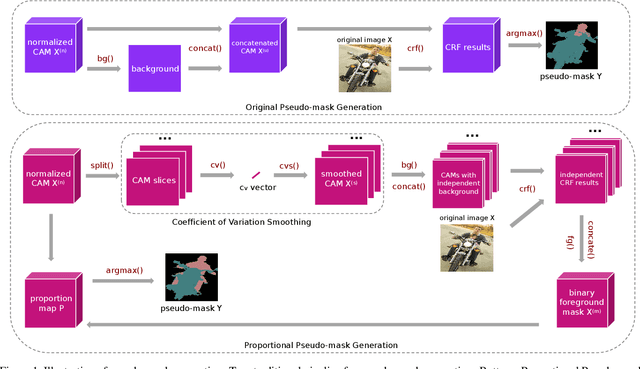
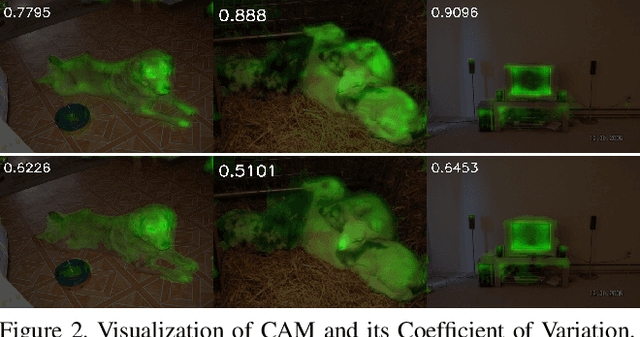
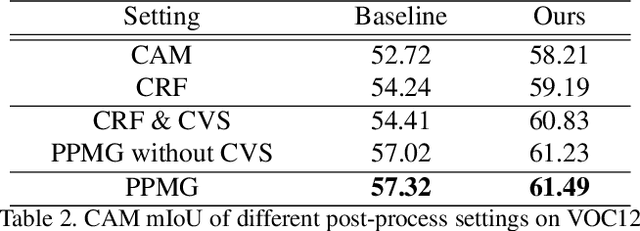
Most weakly supervised semantic segmentation (WSSS) methods follow the pipeline that generates pseudo-masks initially and trains the segmentation model with the pseudo-masks in fully supervised manner after. However, we find some matters related to the pseudo-masks, including high quality pseudo-masks generation from class activation maps (CAMs), and training with noisy pseudo-mask supervision. For these matters, we propose the following designs to push the performance to new state-of-art: (i) Coefficient of Variation Smoothing to smooth the CAMs adaptively; (ii) Proportional Pseudo-mask Generation to project the expanded CAMs to pseudo-mask based on a new metric indicating the importance of each class on each location, instead of the scores trained from binary classifiers. (iii) Pretended Under-Fitting strategy to suppress the influence of noise in pseudo-mask; (iv) Cyclic Pseudo-mask to boost the pseudo-masks during training of fully supervised semantic segmentation (FSSS). Experiments based on our methods achieve new state-of-art results on two changeling weakly supervised semantic segmentation datasets, pushing the mIoU to 70.0% and 40.2% on PAS-CAL VOC 2012 and MS COCO 2014 respectively. Codes including segmentation framework are released at https://github.com/Eli-YiLi/PMM
Group Fisher Pruning for Practical Network Compression
Aug 02, 2021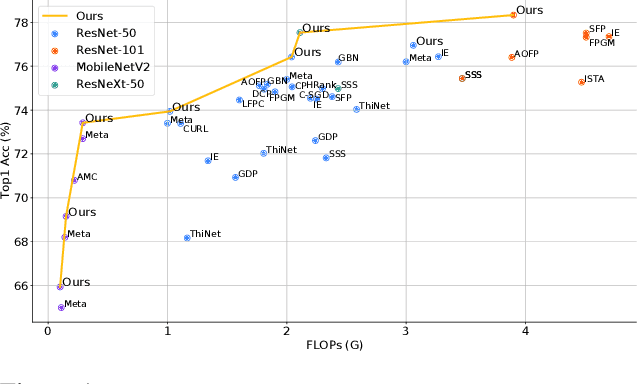
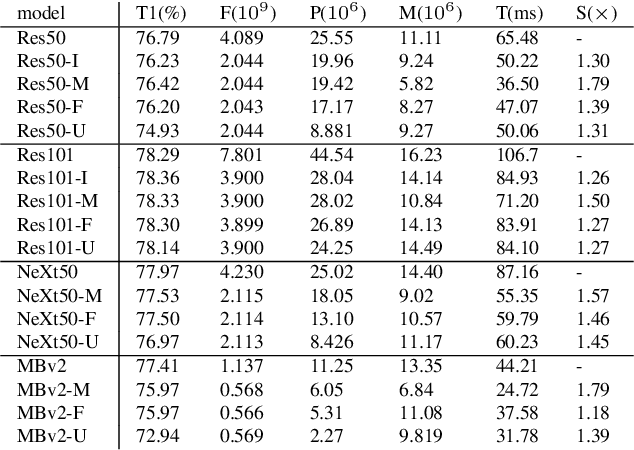
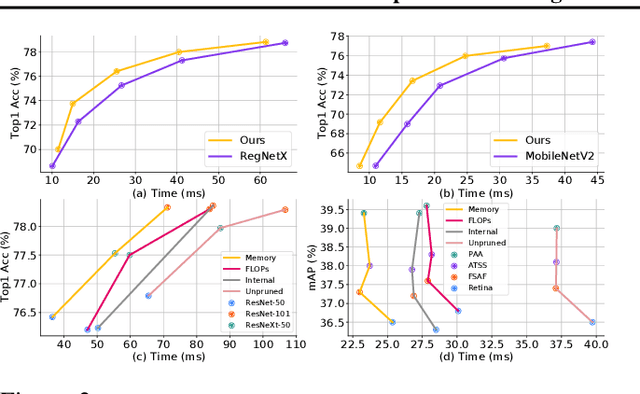
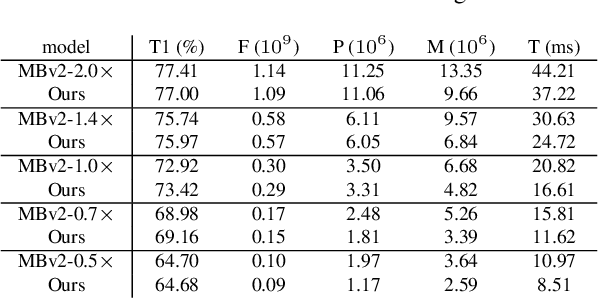
Network compression has been widely studied since it is able to reduce the memory and computation cost during inference. However, previous methods seldom deal with complicated structures like residual connections, group/depth-wise convolution and feature pyramid network, where channels of multiple layers are coupled and need to be pruned simultaneously. In this paper, we present a general channel pruning approach that can be applied to various complicated structures. Particularly, we propose a layer grouping algorithm to find coupled channels automatically. Then we derive a unified metric based on Fisher information to evaluate the importance of a single channel and coupled channels. Moreover, we find that inference speedup on GPUs is more correlated with the reduction of memory rather than FLOPs, and thus we employ the memory reduction of each channel to normalize the importance. Our method can be used to prune any structures including those with coupled channels. We conduct extensive experiments on various backbones, including the classic ResNet and ResNeXt, mobile-friendly MobileNetV2, and the NAS-based RegNet, both on image classification and object detection which is under-explored. Experimental results validate that our method can effectively prune sophisticated networks, boosting inference speed without sacrificing accuracy.
Active and Interactive Mapping with Dynamic Gaussian ProcessImplicit Surfaces for Mobile Manipulators
Oct 25, 2020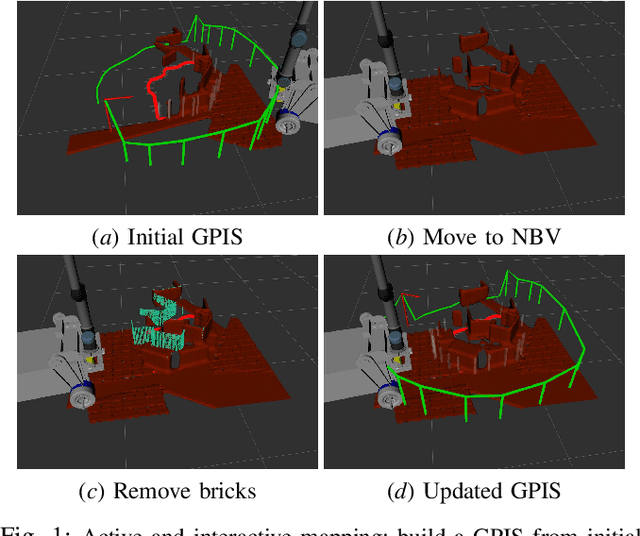
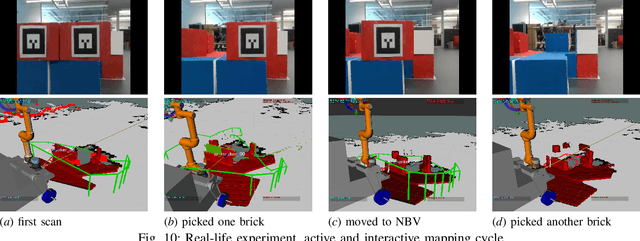
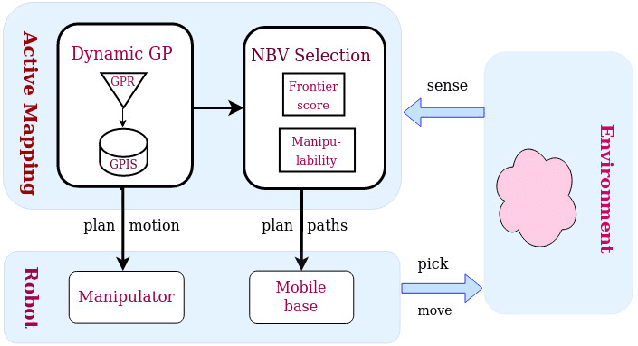
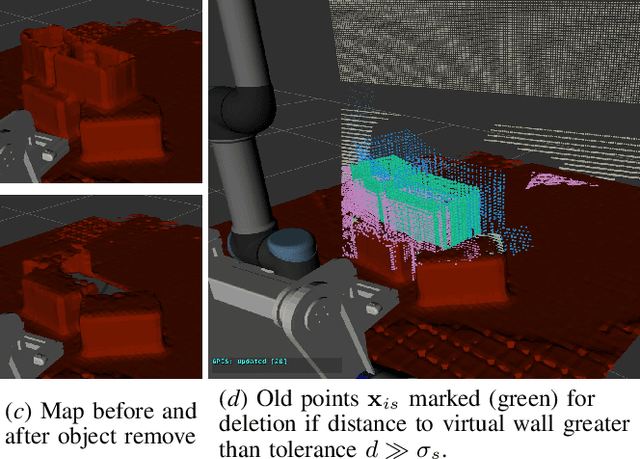
In this paper, we present an interactive probabilistic framework for a mobile manipulator which moves in the environment, makes changes and maps the changing scene alongside. The framework is motivated by interactive robotic applications found in warehouses, construction sites and additive manufacturing, where a mobile robot manipulates objects in the scene. The proposed framework uses a novel dynamic Gaussian Process (GP) Implicit Surface method to incrementally build and update the scene map that reflects environment changes. Actively the framework provides the next-best-view (NBV), balancing the need of pick object reach-ability and map's information gain (IG). To enforce a priority of visiting boundary segments over unknown regions, the IG formulation includes an uncertainty gradient based frontier score by exploiting the GP kernel derivative. This leads to an efficient strategy that addresses the often conflicting requirement of unknown environment exploration and object picking exploitation given a limited execution horizon. We demonstrate the effectiveness of our framework with software simulation and real-life experiments.