 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDanQing: An Up-to-Date Large-Scale Chinese Vision-Language Pre-training Dataset
Jan 15, 2026Vision-Language Pre-training (VLP) models demonstrate strong performance across various downstream tasks by learning from large-scale image-text pairs through contrastive pretraining. The release of extensive English image-text datasets (e.g., COYO-700M and LAION-400M) has enabled widespread adoption of models such as CLIP and SigLIP in tasks including cross-modal retrieval and image captioning. However, the advancement of Chinese vision-language pretraining has substantially lagged behind, due to the scarcity of high-quality Chinese image-text data. To address this gap, we develop a comprehensive pipeline for constructing a high-quality Chinese cross-modal dataset. As a result, we propose DanQing, which contains 100 million image-text pairs collected from Common Crawl. Different from existing datasets, DanQing is curated through a more rigorous selection process, yielding superior data quality. Moreover, DanQing is primarily built from 2024-2025 web data, enabling models to better capture evolving semantic trends and thus offering greater practical utility. We compare DanQing with existing datasets by continual pre-training of the SigLIP2 model. Experimental results show that DanQing consistently achieves superior performance across a range of Chinese downstream tasks, including zero-shot classification, cross-modal retrieval, and LMM-based evaluations. To facilitate further research in Chinese vision-language pre-training, we will open-source the DanQing dataset under the Creative Common CC-BY 4.0 license.
A Scene Representation for Online Spatial Sonification
Dec 07, 2024Robotic perception is emerging as a crucial technology for navigation aids, particularly benefiting individuals with visual impairments through sonification. This paper presents a novel mapping framework that accurately represents spatial geometry for sonification, transforming physical spaces into auditory experiences. By leveraging depth sensors, we convert incrementally built 3D scenes into a compact 360-degree representation based on angular and distance information, aligning with human auditory perception. Our proposed mapping framework utilises a sensor-centric structure, maintaining 2D circular or 3D cylindrical representations, and employs the VDB-GPDF for efficient online mapping. We introduce two sonification modes-circular ranging and circular ranging of objects-along with real-time user control over auditory filters. Incorporating binaural room impulse responses, our framework provides perceptually robust auditory feedback. Quantitative and qualitative evaluations demonstrate superior performance in accuracy, coverage, and timing compared to existing approaches, with effective handling of dynamic objects. The accompanying video showcases the practical application of spatial sonification in room-like environments.
Gaussian Process Distance Fields Obstacle and Ground Constraints for Safe Navigation
Oct 23, 2024Navigating cluttered environments is a challenging task for any mobile system. Existing approaches for ground-based mobile systems primarily focus on small wheeled robots, which face minimal constraints with overhanging obstacles and cannot manage steps or stairs, making the problem effectively 2D. However, navigation for legged robots (or even humans) has to consider an extra dimension. This paper proposes a tailored scene representation coupled with an advanced trajectory optimisation algorithm to enable safe navigation. Our 3D navigation approach is suitable for any ground-based mobile robot, whether wheeled or legged, as well as for human assistance. Given a 3D point cloud of the scene and the segmentation of the ground and non-ground points, we formulate two Gaussian Process distance fields to ensure a collision-free path and maintain distance to the ground constraints. Our method adeptly handles uneven terrain, steps, and overhanging objects through an innovative use of a quadtree structure, constructing a multi-resolution map of the free space and its connectivity graph based on a 2D projection of the relevant scene. Evaluations with both synthetic and real-world datasets demonstrate that this approach provides safe and smooth paths, accommodating a wide range of ground-based mobile systems.
DynORecon: Dynamic Object Reconstruction for Navigation
Sep 30, 2024This paper presents DynORecon, a Dynamic Object Reconstruction system that leverages the information provided by Dynamic SLAM to simultaneously generate a volumetric map of observed moving entities while estimating free space to support navigation. By capitalising on the motion estimations provided by Dynamic SLAM, DynORecon continuously refines the representation of dynamic objects to eliminate residual artefacts from past observations and incrementally reconstructs each object, seamlessly integrating new observations to capture previously unseen structures. Our system is highly efficient (~20 FPS) and produces accurate (~10 cm) reconstructions of dynamic objects using simulated and real-world outdoor datasets.
Safe Bubble Cover for Motion Planning on Distance Fields
Aug 23, 2024We consider the problem of planning collision-free trajectories on distance fields. Our key observation is that querying a distance field at one configuration reveals a region of safe space whose radius is given by the distance value, obviating the need for additional collision checking within the safe region. We refer to such regions as safe bubbles, and show that safe bubbles can be obtained from any Lipschitz-continuous safety constraint. Inspired by sampling-based planning algorithms, we present three algorithms for constructing a safe bubble cover of free space, named bubble roadmap (BRM), rapidly exploring bubble graph (RBG), and expansive bubble graph (EBG). The bubble sampling algorithms are combined with a hierarchical planning method that first computes a discrete path of bubbles, followed by a continuous path within the bubbles computed via convex optimization. Experimental results show that the bubble-based methods yield up to 5- 10 times cost reduction relative to conventional baselines while simultaneously reducing computational efforts by orders of magnitude.
VDB-GPDF: Online Gaussian Process Distance Field with VDB Structure
Jul 12, 2024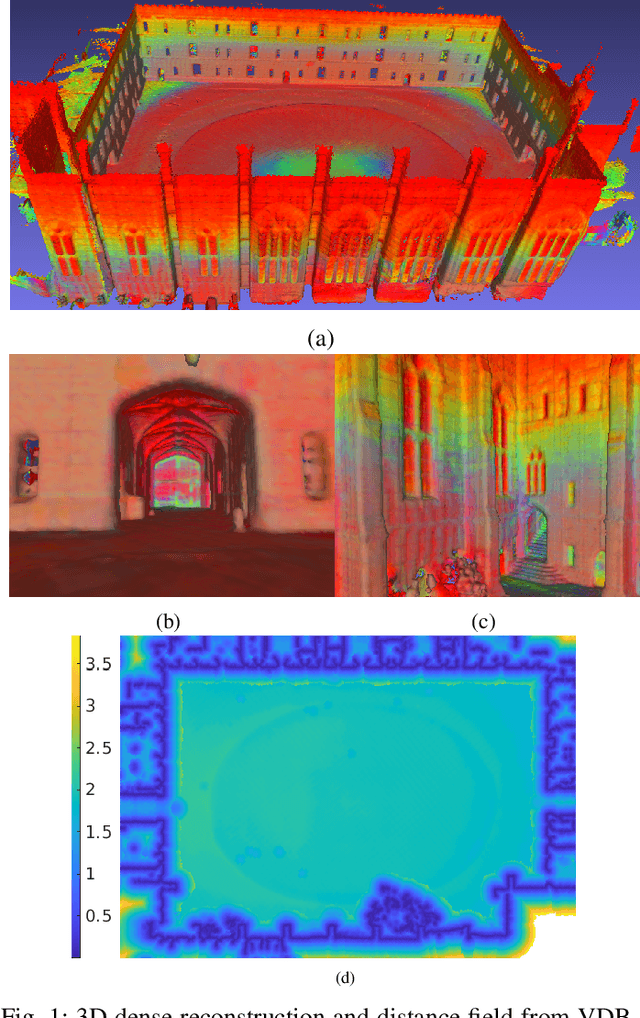
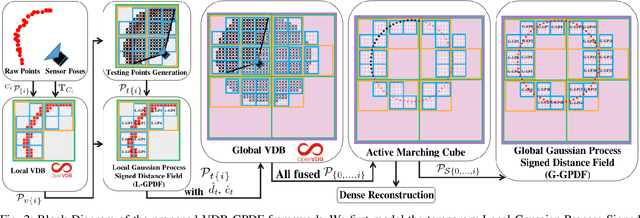
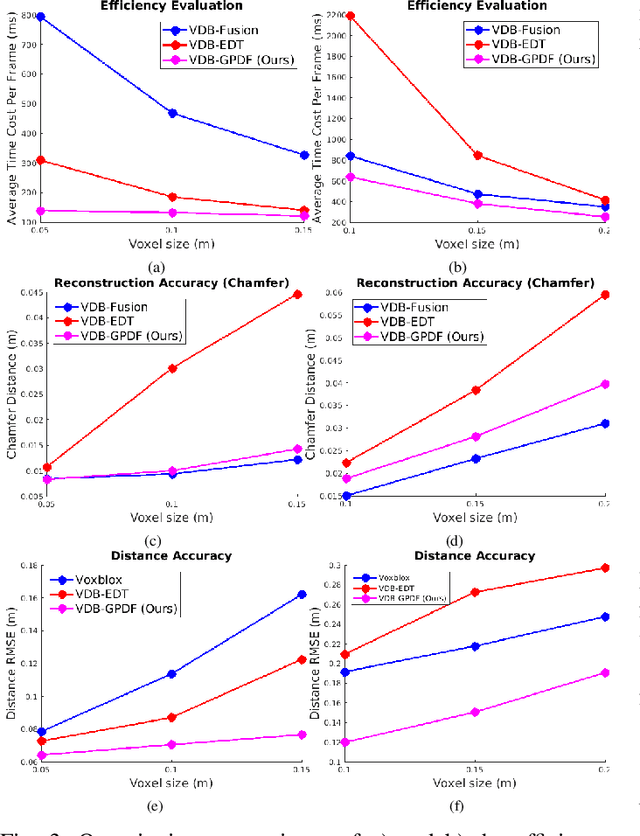
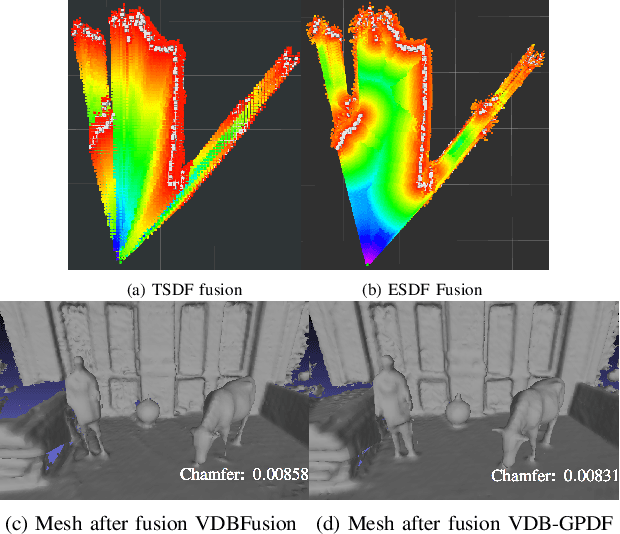
Robots reason about the environment through dedicated representations. Popular choices for dense representations exploit Truncated Signed Distance Functions (TSDF) and Octree data structures. However, TSDF is a projective signed distance obtained directly from depth measurements that overestimates the Euclidean distance. Octrees, despite being memory efficient, require tree traversal and can lead to increased runtime in large scenarios. Other representations based on Gaussian Process (GP) distance fields are appealing due to their probabilistic and continuous nature, but the computational complexity is a concern. In this paper, we present an online efficient mapping framework that seamlessly couples GP distance fields and the fast-access VDB data structure. This framework incrementally builds the Euclidean distance field and fuses other surface properties, like intensity or colour, into a global scene representation that can cater for large-scale scenarios. The key aspect is a latent Local GP Signed Distance Field (L-GPDF) contained in a local VDB structure that allows fast queries of the Euclidean distance, surface properties and their uncertainties for arbitrary points in the field of view. Probabilistic fusion is then performed by merging the inferred values of these points into a global VDB structure that is efficiently maintained over time. After fusion, the surface mesh is recovered, and a global GP Signed Distance Field (G-GPDF) is generated and made available for downstream applications to query accurate distance and gradients. A comparison with the state-of-the-art frameworks shows superior efficiency and accuracy of the inferred distance field and comparable reconstruction performance. The accompanying code will be publicly available. https://github.com/UTS-RI/VDB_GPDF
Exploring Probabilistic Distance Fields in Robotics
May 29, 2024The success of intelligent robotic missions relies on integrating various research tasks, each demanding distinct representations. Designing task-specific representations for each task is costly and impractical. Unified representations suitable for multiple tasks remain unexplored. My outline introduces a series of research outcomes of GP-based probabilistic distance field (GPDF) representation that mathematically models the fundamental property of Euclidean distance field (EDF) along with gradients, surface normals and dense reconstruction. The progress to date and ongoing future works show that GPDF has the potential to offer a unified solution of representation for multiple tasks such as localisation, mapping, motion planning, obstacle avoidance, grasping, human-robot collaboration, and dense visualisation. I believe that GPDF serves as the cornerstone for robots to accomplish more complex and challenging tasks. By leveraging GPDF, robots can navigate through intricate environments, understand spatial relationships, and interact with objects and humans seamlessly.
FlightPatchNet: Multi-Scale Patch Network with Differential Coding for Flight Trajectory Prediction
May 25, 2024
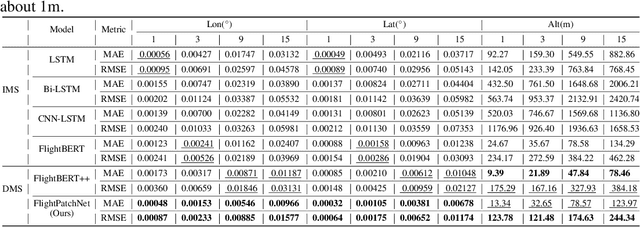
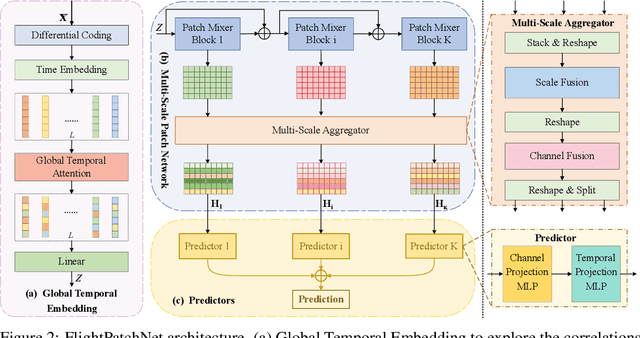
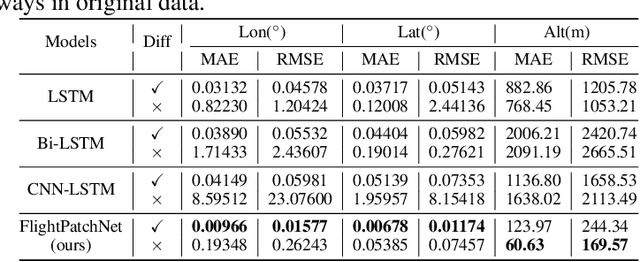
Accurate multi-step flight trajectory prediction plays an important role in Air Traffic Control, which can ensure the safety of air transportation. Two main issues limit the flight trajectory prediction performance of existing works. The first issue is the negative impact on prediction accuracy caused by the significant differences in data range. The second issue is that real-world flight trajectories involve underlying temporal dependencies, and existing methods fail to reveal the hidden complex temporal variations and only extract features from one single time scale. To address the above issues, we propose FlightPatchNet, a multi-scale patch network with differential coding for flight trajectory prediction. Specifically, FlightPatchNet first utilizes the differential coding to encode the original values of longitude and latitude into first-order differences and generates embeddings for all variables at each time step. Then, a global temporal attention is introduced to explore the dependencies between different time steps. To fully explore the diverse temporal patterns in flight trajectories, a multi-scale patch network is delicately designed to serve as the backbone. The multi-scale patch network exploits stacked patch mixer blocks to capture inter- and intra-patch dependencies under different time scales, and further integrates multi-scale temporal features across different scales and variables. Finally, FlightPatchNet ensembles multiple predictors to make direct multi-step prediction. Extensive experiments on ADS-B datasets demonstrate that our model outperforms the competitive baselines. Code is available at: https://github.com/FlightTrajectoryResearch/FlightPatchNet.
Interactive Distance Field Mapping and Planning to Enable Human-Robot Collaboration
Mar 15, 2024



Human-robot collaborative applications require scene representations that are kept up-to-date and facilitate safe motions in dynamic scenes. In this letter, we present an interactive distance field mapping and planning (IDMP) framework that handles dynamic objects and collision avoidance through an efficient representation. We define \textit{interactive} mapping and planning as the process of creating and updating the representation of the scene online while simultaneously planning and adapting the robot's actions based on that representation. Given depth sensor data, our framework builds a continuous field that allows to query the distance and gradient to the closest obstacle at any required position in 3D space. The key aspect of this work is an efficient Gaussian Process field that performs incremental updates and implicitly handles dynamic objects with a simple and elegant formulation based on a temporary latent model. In terms of mapping, IDMP is able to fuse point cloud data from single and multiple sensors, query the free space at any spatial resolution, and deal with moving objects without semantics. In terms of planning, IDMP allows seamless integration with gradient-based motion planners facilitating fast re-planning for collision-free navigation. The framework is evaluated on both real and synthetic datasets. A comparison with similar state-of-the-art frameworks shows superior performance when handling dynamic objects and comparable or better performance in the accuracy of the computed distance and gradient field. Finally, we show how the framework can be used for fast motion planning in the presence of moving objects. An accompanying video, code, and datasets are made publicly available https://uts-ri.github.io/IDMP.
Accurate Gaussian Process Distance Fields with applications to Echolocation and Mapping
Feb 25, 2023This paper introduces a novel method to estimate distance fields from noisy point clouds using Gaussian Process (GP) regression. Distance fields, or distance functions, gained popularity for applications like point cloud registration, odometry, SLAM, path planning, shape reconstruction, etc. A distance field provides a continuous representation of the scene. It is defined as the shortest distance from any query point and the closest surface. The key concept of the proposed method is a reverting function used to turn a GP-inferred occupancy field into an accurate distance field. The reverting function is specific to the chosen GP kernel. This paper provides the theoretical derivation of the proposed method and its relationship to existing techniques. The improved accuracy compared with existing distance fields is demonstrated with extensive simulated experiments. The level of accuracy of the proposed approach allows for novel applications that rely on precise distance estimation. Thus, alongside 3D point cloud registration, this work presents echolocation and mapping frameworks using ultrasonic guided waves sensing metallic structures. These methods leverage the proposed distance field in physics-based models to simulate the signal propagation and compare it with the actual signal received. Both simulated and real-world experiments are conducted to demonstrate the soundness of these frameworks.