 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeedEdit 3.0: Fast and High-Quality Generative Image Editing
Jun 06, 2025We introduce SeedEdit 3.0, in companion with our T2I model Seedream 3.0, which significantly improves over our previous SeedEdit versions in both aspects of edit instruction following and image content (e.g., ID/IP) preservation on real image inputs. Additional to model upgrading with T2I, in this report, we present several key improvements. First, we develop an enhanced data curation pipeline with a meta-info paradigm and meta-info embedding strategy that help mix images from multiple data sources. This allows us to scale editing data effectively, and meta information is helpfult to connect VLM with diffusion model more closely. Second, we introduce a joint learning pipeline for computing a diffusion loss and reward losses. Finally, we evaluate SeedEdit 3.0 on our testing benchmarks, for real/synthetic image editing, where it achieves a best trade-off between multiple aspects, yielding a high usability rate of 56.1%, compared to SeedEdit 1.6 (38.4%), GPT4o (37.1%) and Gemini 2.0 (30.3%).
Seedream 3.0 Technical Report
Apr 16, 2025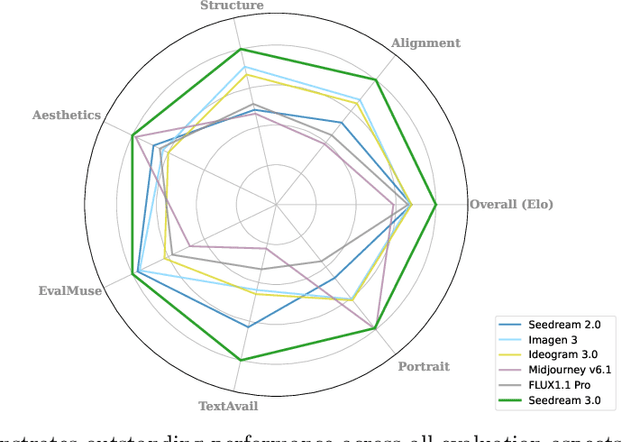


We present Seedream 3.0, a high-performance Chinese-English bilingual image generation foundation model. We develop several technical improvements to address existing challenges in Seedream 2.0, including alignment with complicated prompts, fine-grained typography generation, suboptimal visual aesthetics and fidelity, and limited image resolutions. Specifically, the advancements of Seedream 3.0 stem from improvements across the entire pipeline, from data construction to model deployment. At the data stratum, we double the dataset using a defect-aware training paradigm and a dual-axis collaborative data-sampling framework. Furthermore, we adopt several effective techniques such as mixed-resolution training, cross-modality RoPE, representation alignment loss, and resolution-aware timestep sampling in the pre-training phase. During the post-training stage, we utilize diversified aesthetic captions in SFT, and a VLM-based reward model with scaling, thereby achieving outputs that well align with human preferences. Furthermore, Seedream 3.0 pioneers a novel acceleration paradigm. By employing consistent noise expectation and importance-aware timestep sampling, we achieve a 4 to 8 times speedup while maintaining image quality. Seedream 3.0 demonstrates significant improvements over Seedream 2.0: it enhances overall capabilities, in particular for text-rendering in complicated Chinese characters which is important to professional typography generation. In addition, it provides native high-resolution output (up to 2K), allowing it to generate images with high visual quality.
Seedream 2.0: A Native Chinese-English Bilingual Image Generation Foundation Model
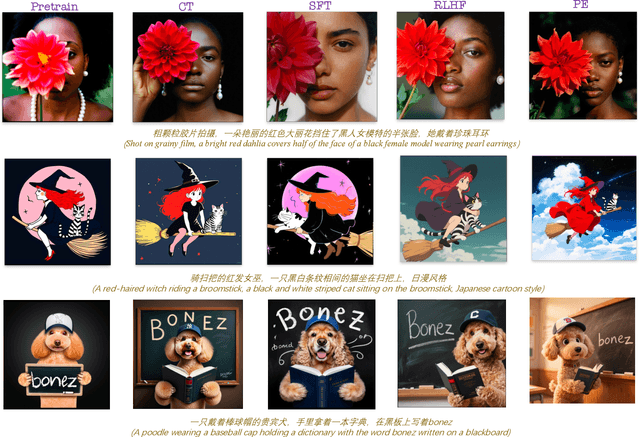
Mar 10, 2025Rapid advancement of diffusion models has catalyzed remarkable progress in the field of image generation. However, prevalent models such as Flux, SD3.5 and Midjourney, still grapple with issues like model bias, limited text rendering capabilities, and insufficient understanding of Chinese cultural nuances. To address these limitations, we present Seedream 2.0, a native Chinese-English bilingual image generation foundation model that excels across diverse dimensions, which adeptly manages text prompt in both Chinese and English, supporting bilingual image generation and text rendering. We develop a powerful data system that facilitates knowledge integration, and a caption system that balances the accuracy and richness for image description. Particularly, Seedream is integrated with a self-developed bilingual large language model as a text encoder, allowing it to learn native knowledge directly from massive data. This enable it to generate high-fidelity images with accurate cultural nuances and aesthetic expressions described in either Chinese or English. Beside, Glyph-Aligned ByT5 is applied for flexible character-level text rendering, while a Scaled ROPE generalizes well to untrained resolutions. Multi-phase post-training optimizations, including SFT and RLHF iterations, further improve the overall capability. Through extensive experimentation, we demonstrate that Seedream 2.0 achieves state-of-the-art performance across multiple aspects, including prompt-following, aesthetics, text rendering, and structural correctness. Furthermore, Seedream 2.0 has been optimized through multiple RLHF iterations to closely align its output with human preferences, as revealed by its outstanding ELO score. In addition, it can be readily adapted to an instruction-based image editing model, such as SeedEdit, with strong editing capability that balances instruction-following and image consistency.
NightLab: A Dual-level Architecture with Hardness Detection for Segmentation at Night
Apr 12, 2022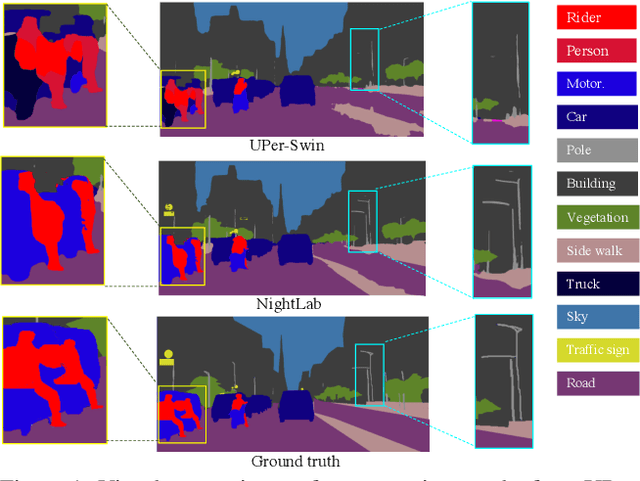
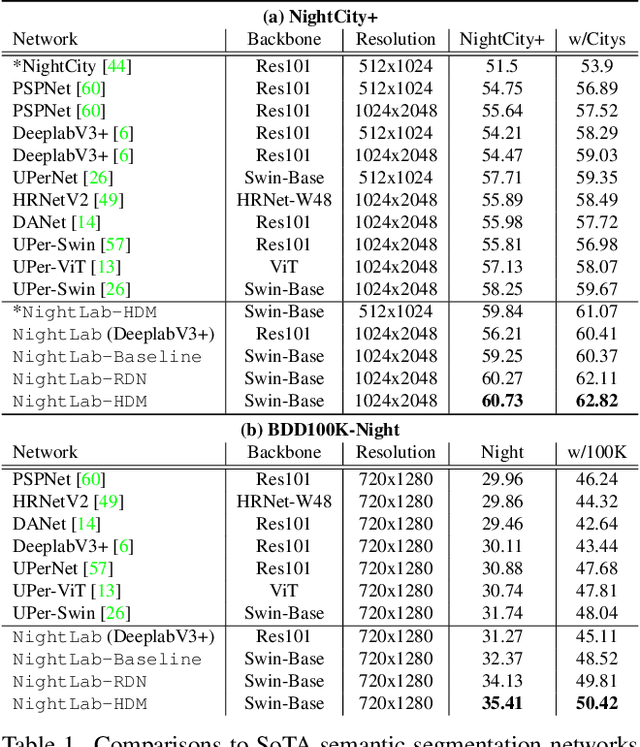
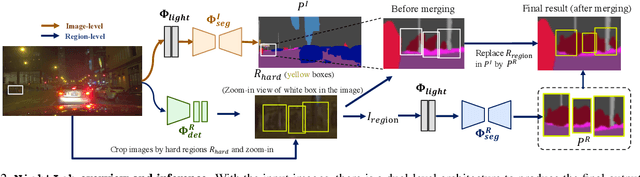

The semantic segmentation of nighttime scenes is a challenging problem that is key to impactful applications like self-driving cars. Yet, it has received little attention compared to its daytime counterpart. In this paper, we propose NightLab, a novel nighttime segmentation framework that leverages multiple deep learning models imbued with night-aware features to yield State-of-The-Art (SoTA) performance on multiple night segmentation benchmarks. Notably, NightLab contains models at two levels of granularity, i.e. image and regional, and each level is composed of light adaptation and segmentation modules. Given a nighttime image, the image level model provides an initial segmentation estimate while, in parallel, a hardness detection module identifies regions and their surrounding context that need further analysis. A regional level model focuses on these difficult regions to provide a significantly improved segmentation. All the models in NightLab are trained end-to-end using a set of proposed night-aware losses without handcrafted heuristics. Extensive experiments on the NightCity and BDD100K datasets show NightLab achieves SoTA performance compared to concurrent methods.
HR-NAS: Searching Efficient High-Resolution Neural Architectures with Lightweight Transformers
Jun 11, 2021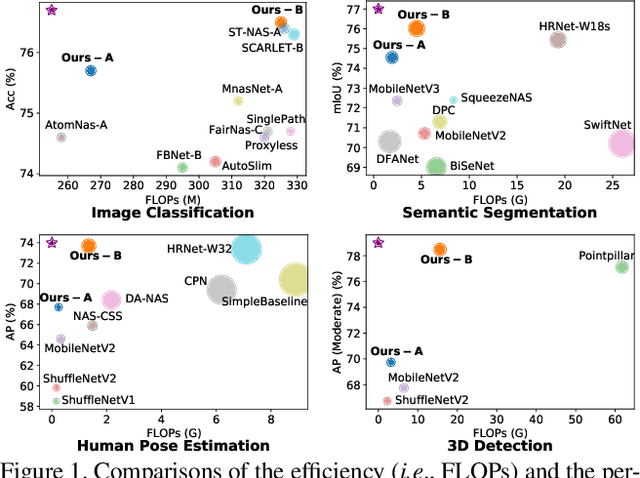
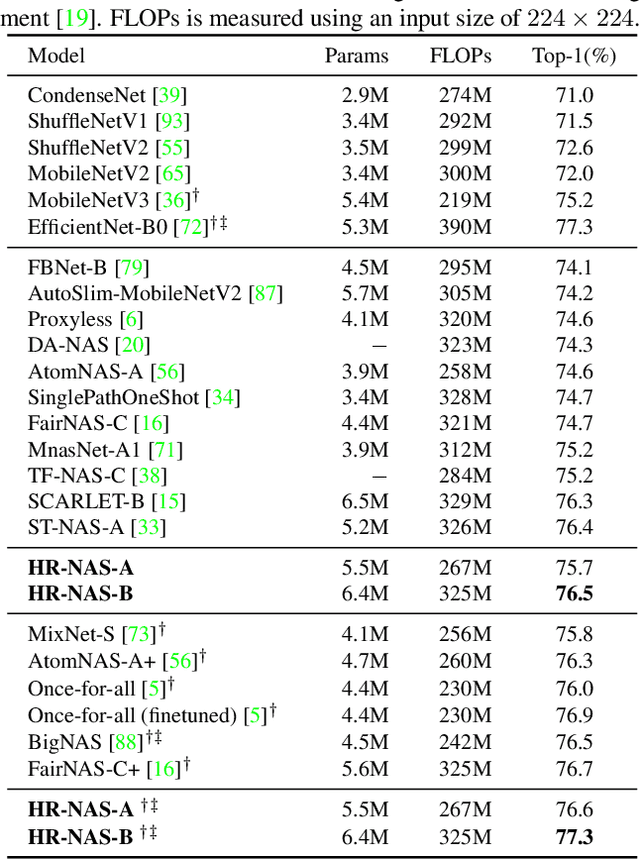
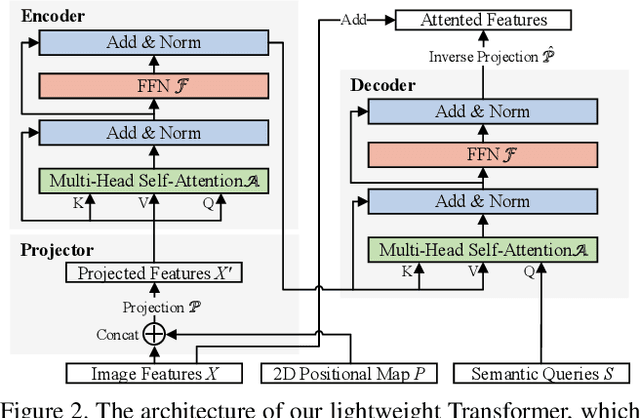
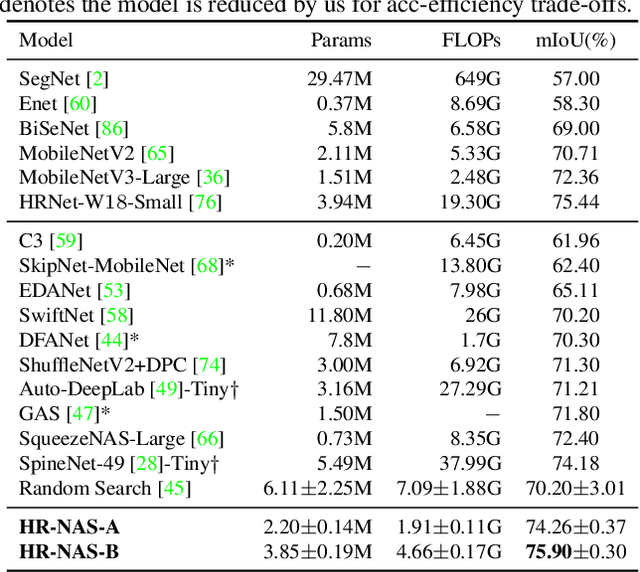
High-resolution representations (HR) are essential for dense prediction tasks such as segmentation, detection, and pose estimation. Learning HR representations is typically ignored in previous Neural Architecture Search (NAS) methods that focus on image classification. This work proposes a novel NAS method, called HR-NAS, which is able to find efficient and accurate networks for different tasks, by effectively encoding multiscale contextual information while maintaining high-resolution representations. In HR-NAS, we renovate the NAS search space as well as its searching strategy. To better encode multiscale image contexts in the search space of HR-NAS, we first carefully design a lightweight transformer, whose computational complexity can be dynamically changed with respect to different objective functions and computation budgets. To maintain high-resolution representations of the learned networks, HR-NAS adopts a multi-branch architecture that provides convolutional encoding of multiple feature resolutions, inspired by HRNet. Last, we proposed an efficient fine-grained search strategy to train HR-NAS, which effectively explores the search space, and finds optimal architectures given various tasks and computation resources. HR-NAS is capable of achieving state-of-the-art trade-offs between performance and FLOPs for three dense prediction tasks and an image classification task, given only small computational budgets. For example, HR-NAS surpasses SqueezeNAS that is specially designed for semantic segmentation while improving efficiency by 45.9%. Code is available at https://github.com/dingmyu/HR-NAS
DeepViT: Towards Deeper Vision Transformer
Apr 19, 2021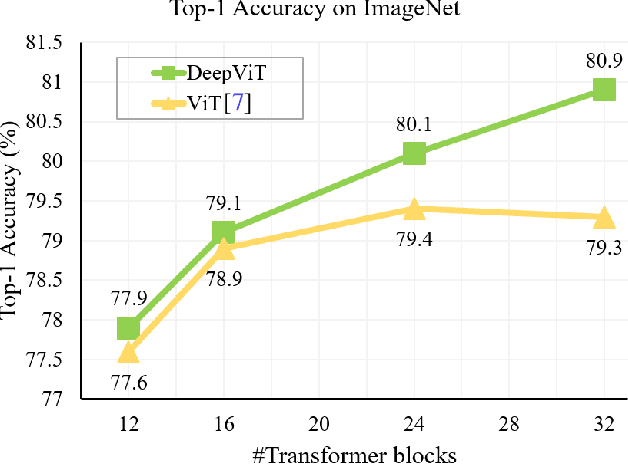
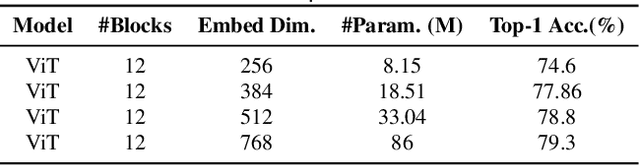
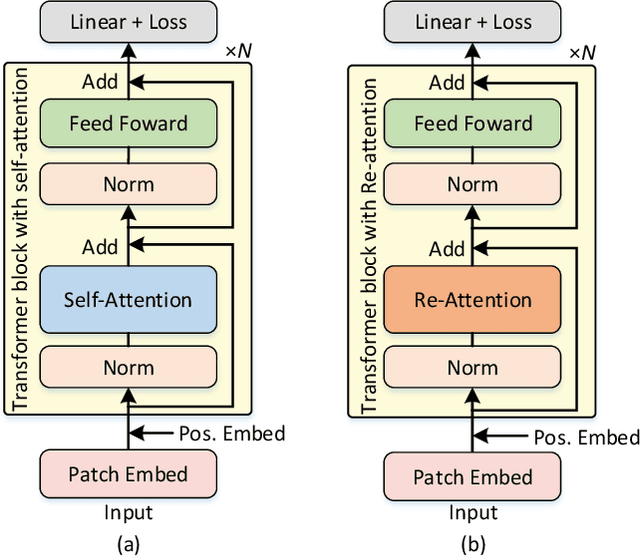

Vision transformers (ViTs) have been successfully applied in image classification tasks recently. In this paper, we show that, unlike convolution neural networks (CNNs)that can be improved by stacking more convolutional layers, the performance of ViTs saturate fast when scaled to be deeper. More specifically, we empirically observe that such scaling difficulty is caused by the attention collapse issue: as the transformer goes deeper, the attention maps gradually become similar and even much the same after certain layers. In other words, the feature maps tend to be identical in the top layers of deep ViT models. This fact demonstrates that in deeper layers of ViTs, the self-attention mechanism fails to learn effective concepts for representation learning and hinders the model from getting expected performance gain. Based on above observation, we propose a simple yet effective method, named Re-attention, to re-generate the attention maps to increase their diversity at different layers with negligible computation and memory cost. The pro-posed method makes it feasible to train deeper ViT models with consistent performance improvements via minor modification to existing ViT models. Notably, when training a deep ViT model with 32 transformer blocks, the Top-1 classification accuracy can be improved by 1.6% on ImageNet. Code is publicly available at https://github.com/zhoudaquan/dvit_repo.
AutoSpace: Neural Architecture Search with Less Human Interference
Mar 22, 2021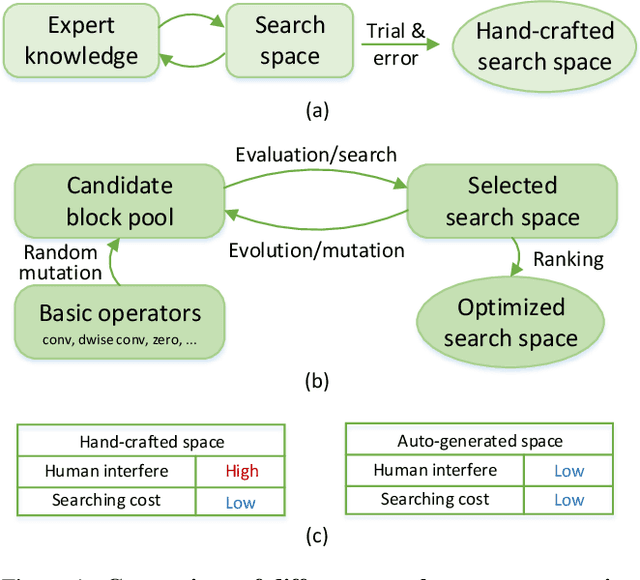
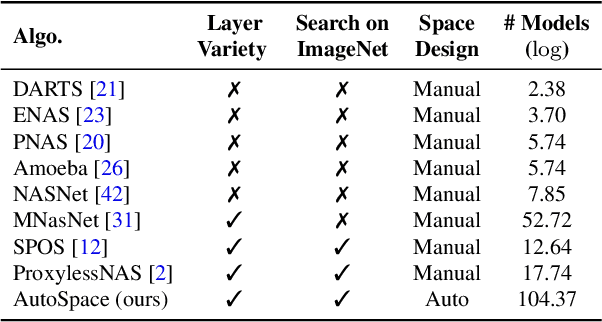
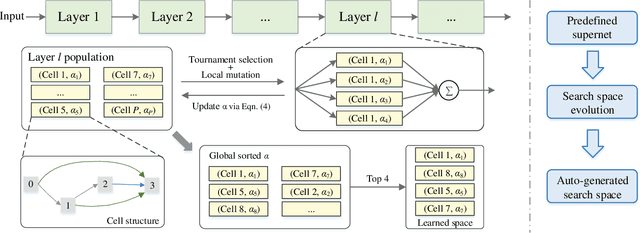
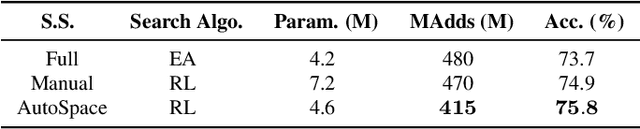
Current neural architecture search (NAS) algorithms still require expert knowledge and effort to design a search space for network construction. In this paper, we consider automating the search space design to minimize human interference, which however faces two challenges: the explosive complexity of the exploration space and the expensive computation cost to evaluate the quality of different search spaces. To solve them, we propose a novel differentiable evolutionary framework named AutoSpace, which evolves the search space to an optimal one with following novel techniques: a differentiable fitness scoring function to efficiently evaluate the performance of cells and a reference architecture to speedup the evolution procedure and avoid falling into sub-optimal solutions. The framework is generic and compatible with additional computational constraints, making it feasible to learn specialized search spaces that fit different computational budgets. With the learned search space, the performance of recent NAS algorithms can be improved significantly compared with using previously manually designed spaces. Remarkably, the models generated from the new search space achieve 77.8% top-1 accuracy on ImageNet under the mobile setting (MAdds < 500M), out-performing previous SOTA EfficientNet-B0 by 0.7%. All codes will be made public.
Neural Architecture Search for Lightweight Non-Local Networks
Apr 04, 2020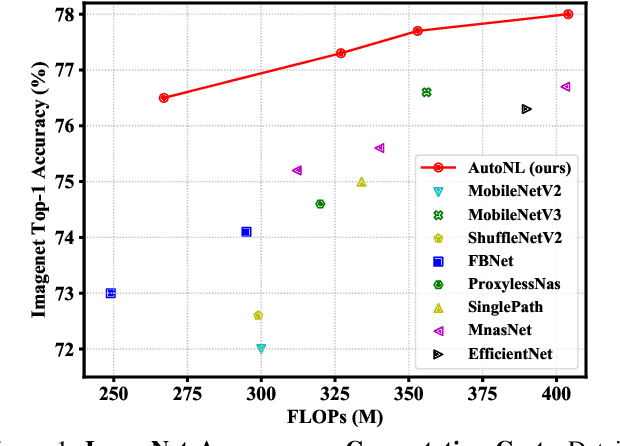
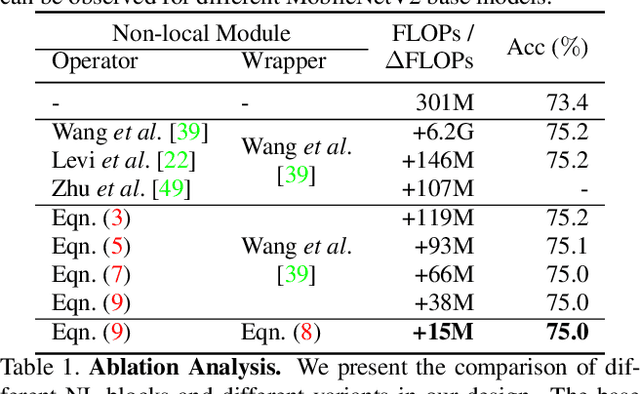
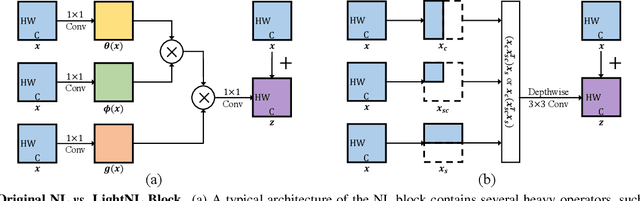
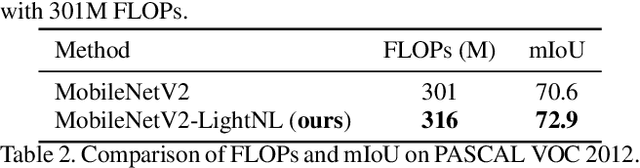
Non-Local (NL) blocks have been widely studied in various vision tasks. However, it has been rarely explored to embed the NL blocks in mobile neural networks, mainly due to the following challenges: 1) NL blocks generally have heavy computation cost which makes it difficult to be applied in applications where computational resources are limited, and 2) it is an open problem to discover an optimal configuration to embed NL blocks into mobile neural networks. We propose AutoNL to overcome the above two obstacles. Firstly, we propose a Lightweight Non-Local (LightNL) block by squeezing the transformation operations and incorporating compact features. With the novel design choices, the proposed LightNL block is 400x computationally cheaper} than its conventional counterpart without sacrificing the performance. Secondly, by relaxing the structure of the LightNL block to be differentiable during training, we propose an efficient neural architecture search algorithm to learn an optimal configuration of LightNL blocks in an end-to-end manner. Notably, using only 32 GPU hours, the searched AutoNL model achieves 77.7% top-1 accuracy on ImageNet under a typical mobile setting (350M FLOPs), significantly outperforming previous mobile models including MobileNetV2 (+5.7%), FBNet (+2.8%) and MnasNet (+2.1%). Code and models are available at https://github.com/LiYingwei/AutoNL.
AtomNAS: Fine-Grained End-to-End Neural Architecture Search
Dec 20, 2019
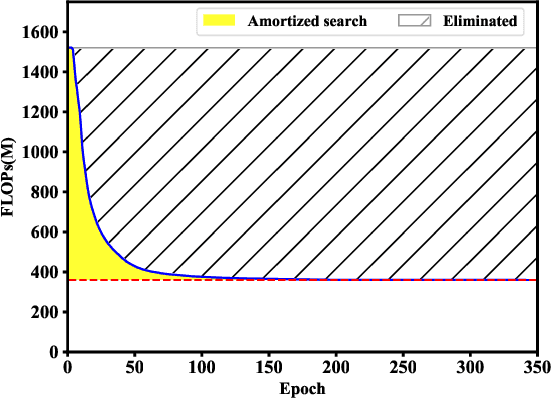
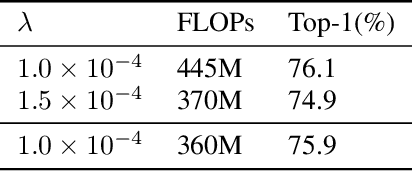
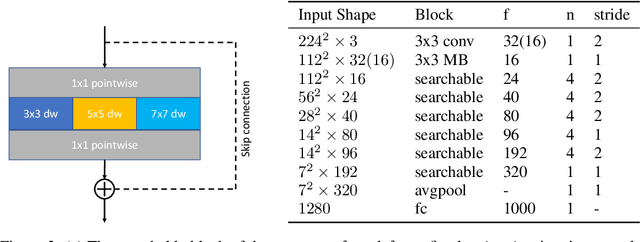
Designing of search space is a critical problem for neural architecture search (NAS) algorithms. We propose a fine-grained search space comprised of atomic blocks, a minimal search unit much smaller than the ones used in recent NAS algorithms. This search space facilitates direct selection of channel numbers and kernel sizes in convolutions. In addition, we propose a resource-aware architecture search algorithm which dynamically selects atomic blocks during training. The algorithm is further accelerated by a dynamic network shrinkage technique. Instead of a search-and-retrain two-stage paradigm, our method can simultaneously search and train the target architecture in an end-to-end manner. Our method achieves state-of-the-art performance under several FLOPS configurations on ImageNet with a negligible searching cost. We open our entire codebase at: https://github.com/meijieru/AtomNAS
Guided Feature Transformation (GFT): A Neural Language Grounding Module for Embodied Agents
Sep 04, 2018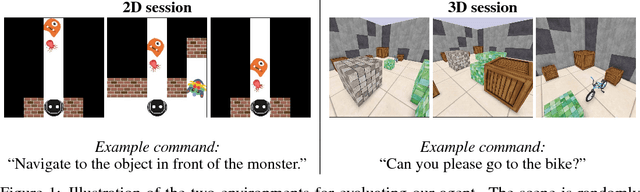
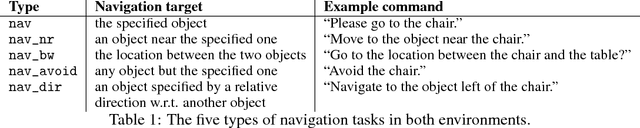
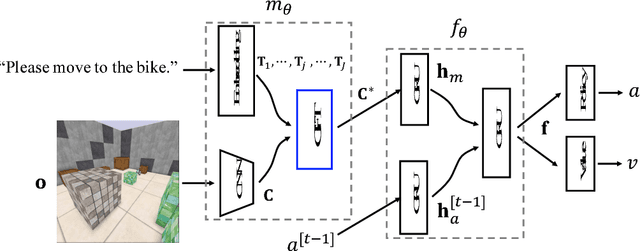
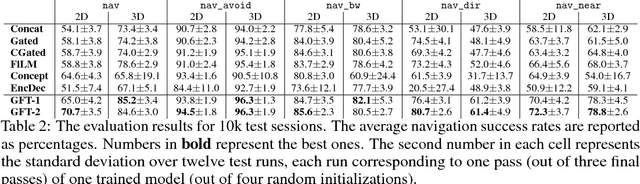
Recently there has been a rising interest in training agents, embodied in virtual environments, to perform language-directed tasks by deep reinforcement learning. In this paper, we propose a simple but effective neural language grounding module for embodied agents that can be trained end to end from scratch taking raw pixels, unstructured linguistic commands, and sparse rewards as the inputs. We model the language grounding process as a language-guided transformation of visual features, where latent sentence embeddings are used as the transformation matrices. In several language-directed navigation tasks that feature challenging partial observability and require simple reasoning, our module significantly outperforms the state of the art. We also release XWorld3D, an easy-to-customize 3D environment that can potentially be modified to evaluate a variety of embodied agents.