 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMixture of Contexts for Long Video Generation
Aug 28, 2025Long video generation is fundamentally a long context memory problem: models must retain and retrieve salient events across a long range without collapsing or drifting. However, scaling diffusion transformers to generate long-context videos is fundamentally limited by the quadratic cost of self-attention, which makes memory and computation intractable and difficult to optimize for long sequences. We recast long-context video generation as an internal information retrieval task and propose a simple, learnable sparse attention routing module, Mixture of Contexts (MoC), as an effective long-term memory retrieval engine. In MoC, each query dynamically selects a few informative chunks plus mandatory anchors (caption, local windows) to attend to, with causal routing that prevents loop closures. As we scale the data and gradually sparsify the routing, the model allocates compute to salient history, preserving identities, actions, and scenes over minutes of content. Efficiency follows as a byproduct of retrieval (near-linear scaling), which enables practical training and synthesis, and the emergence of memory and consistency at the scale of minutes.
Captain Cinema: Towards Short Movie Generation
Jul 24, 2025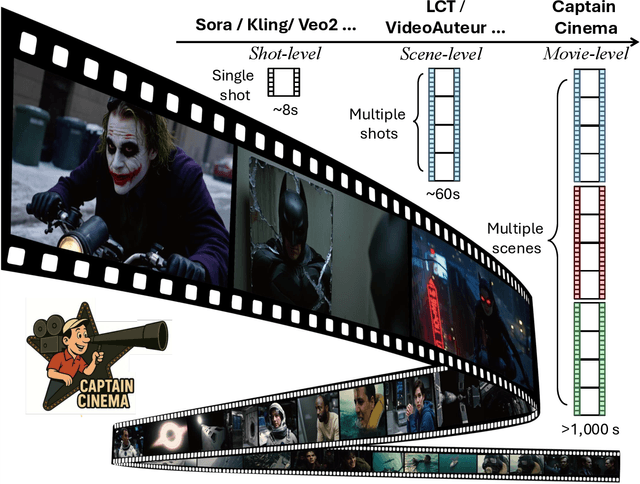
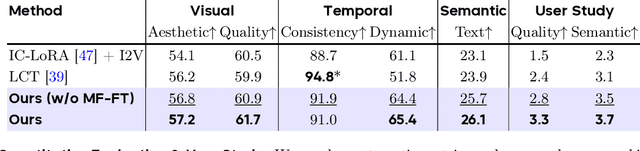
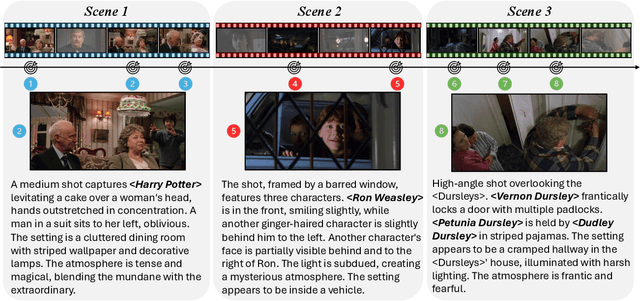
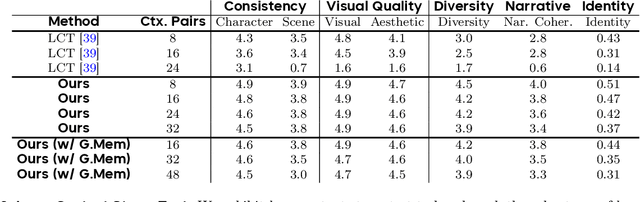
We present Captain Cinema, a generation framework for short movie generation. Given a detailed textual description of a movie storyline, our approach firstly generates a sequence of keyframes that outline the entire narrative, which ensures long-range coherence in both the storyline and visual appearance (e.g., scenes and characters). We refer to this step as top-down keyframe planning. These keyframes then serve as conditioning signals for a video synthesis model, which supports long context learning, to produce the spatio-temporal dynamics between them. This step is referred to as bottom-up video synthesis. To support stable and efficient generation of multi-scene long narrative cinematic works, we introduce an interleaved training strategy for Multimodal Diffusion Transformers (MM-DiT), specifically adapted for long-context video data. Our model is trained on a specially curated cinematic dataset consisting of interleaved data pairs. Our experiments demonstrate that Captain Cinema performs favorably in the automated creation of visually coherent and narrative consistent short movies in high quality and efficiency. Project page: https://thecinema.ai
Vision-Language-Vision Auto-Encoder: Scalable Knowledge Distillation from Diffusion Models
Jul 09, 2025Building state-of-the-art Vision-Language Models (VLMs) with strong captioning capabilities typically necessitates training on billions of high-quality image-text pairs, requiring millions of GPU hours. This paper introduces the Vision-Language-Vision (VLV) auto-encoder framework, which strategically leverages key pretrained components: a vision encoder, the decoder of a Text-to-Image (T2I) diffusion model, and subsequently, a Large Language Model (LLM). Specifically, we establish an information bottleneck by regularizing the language representation space, achieved through freezing the pretrained T2I diffusion decoder. Our VLV pipeline effectively distills knowledge from the text-conditioned diffusion model using continuous embeddings, demonstrating comprehensive semantic understanding via high-quality reconstructions. Furthermore, by fine-tuning a pretrained LLM to decode the intermediate language representations into detailed descriptions, we construct a state-of-the-art (SoTA) captioner comparable to leading models like GPT-4o and Gemini 2.0 Flash. Our method demonstrates exceptional cost-efficiency and significantly reduces data requirements; by primarily utilizing single-modal images for training and maximizing the utility of existing pretrained models (image encoder, T2I diffusion model, and LLM), it circumvents the need for massive paired image-text datasets, keeping the total training expenditure under $1,000 USD.
Play to Generalize: Learning to Reason Through Game Play
Jun 09, 2025Developing generalizable reasoning capabilities in multimodal large language models (MLLMs) remains challenging. Motivated by cognitive science literature suggesting that gameplay promotes transferable cognitive skills, we propose a novel post-training paradigm, Visual Game Learning, or ViGaL, where MLLMs develop out-of-domain generalization of multimodal reasoning through playing arcade-like games. Specifically, we show that post-training a 7B-parameter MLLM via reinforcement learning (RL) on simple arcade-like games, e.g. Snake, significantly enhances its downstream performance on multimodal math benchmarks like MathVista, and on multi-discipline questions like MMMU, without seeing any worked solutions, equations, or diagrams during RL, suggesting the capture of transferable reasoning skills. Remarkably, our model outperforms specialist models tuned on multimodal reasoning data in multimodal reasoning benchmarks, while preserving the base model's performance on general visual benchmarks, a challenge where specialist models often fall short. Our findings suggest a new post-training paradigm: synthetic, rule-based games can serve as controllable and scalable pre-text tasks that unlock generalizable multimodal reasoning abilities in MLLMs.
VideoAuteur: Towards Long Narrative Video Generation
Jan 10, 2025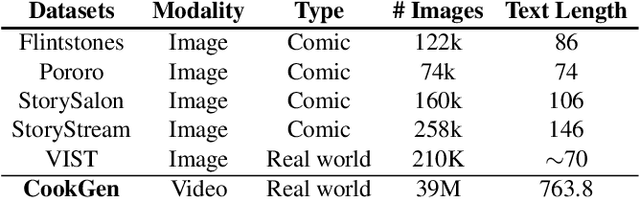



Recent video generation models have shown promising results in producing high-quality video clips lasting several seconds. However, these models face challenges in generating long sequences that convey clear and informative events, limiting their ability to support coherent narrations. In this paper, we present a large-scale cooking video dataset designed to advance long-form narrative generation in the cooking domain. We validate the quality of our proposed dataset in terms of visual fidelity and textual caption accuracy using state-of-the-art Vision-Language Models (VLMs) and video generation models, respectively. We further introduce a Long Narrative Video Director to enhance both visual and semantic coherence in generated videos and emphasize the role of aligning visual embeddings to achieve improved overall video quality. Our method demonstrates substantial improvements in generating visually detailed and semantically aligned keyframes, supported by finetuning techniques that integrate text and image embeddings within the video generation process. Project page: https://videoauteur.github.io/
GenEx: Generating an Explorable World
Dec 12, 2024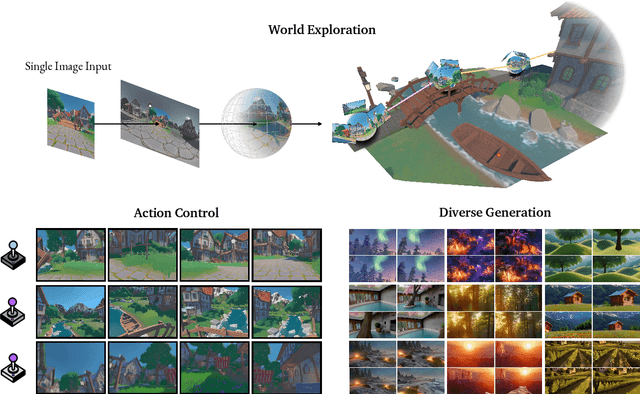

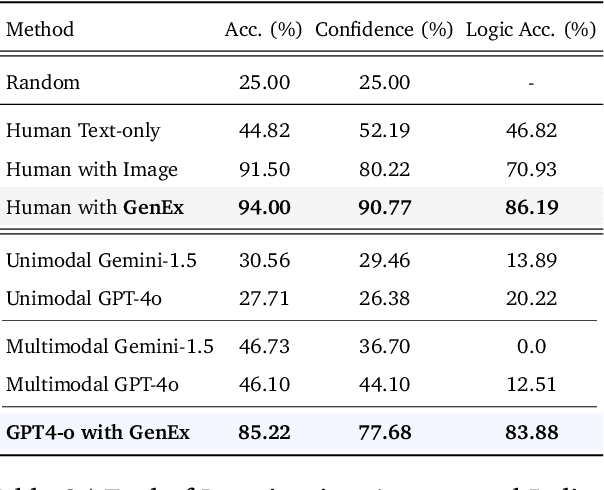
Understanding, navigating, and exploring the 3D physical real world has long been a central challenge in the development of artificial intelligence. In this work, we take a step toward this goal by introducing GenEx, a system capable of planning complex embodied world exploration, guided by its generative imagination that forms priors (expectations) about the surrounding environments. GenEx generates an entire 3D-consistent imaginative environment from as little as a single RGB image, bringing it to life through panoramic video streams. Leveraging scalable 3D world data curated from Unreal Engine, our generative model is rounded in the physical world. It captures a continuous 360-degree environment with little effort, offering a boundless landscape for AI agents to explore and interact with. GenEx achieves high-quality world generation, robust loop consistency over long trajectories, and demonstrates strong 3D capabilities such as consistency and active 3D mapping. Powered by generative imagination of the world, GPT-assisted agents are equipped to perform complex embodied tasks, including both goal-agnostic exploration and goal-driven navigation. These agents utilize predictive expectation regarding unseen parts of the physical world to refine their beliefs, simulate different outcomes based on potential decisions, and make more informed choices. In summary, we demonstrate that GenEx provides a transformative platform for advancing embodied AI in imaginative spaces and brings potential for extending these capabilities to real-world exploration.
What If We Recaption Billions of Web Images with LLaMA-3?
Jun 12, 2024



Web-crawled image-text pairs are inherently noisy. Prior studies demonstrate that semantically aligning and enriching textual descriptions of these pairs can significantly enhance model training across various vision-language tasks, particularly text-to-image generation. However, large-scale investigations in this area remain predominantly closed-source. Our paper aims to bridge this community effort, leveraging the powerful and \textit{open-sourced} LLaMA-3, a GPT-4 level LLM. Our recaptioning pipeline is simple: first, we fine-tune a LLaMA-3-8B powered LLaVA-1.5 and then employ it to recaption 1.3 billion images from the DataComp-1B dataset. Our empirical results confirm that this enhanced dataset, Recap-DataComp-1B, offers substantial benefits in training advanced vision-language models. For discriminative models like CLIP, we observe enhanced zero-shot performance in cross-modal retrieval tasks. For generative models like text-to-image Diffusion Transformers, the generated images exhibit a significant improvement in alignment with users' text instructions, especially in following complex queries. Our project page is https://www.haqtu.me/Recap-Datacomp-1B/
Medical Vision Generalist: Unifying Medical Imaging Tasks in Context
Jun 08, 2024



This study presents Medical Vision Generalist (MVG), the first foundation model capable of handling various medical imaging tasks -- such as cross-modal synthesis, image segmentation, denoising, and inpainting -- within a unified image-to-image generation framework. Specifically, MVG employs an in-context generation strategy that standardizes the handling of inputs and outputs as images. By treating these tasks as an image generation process conditioned on prompt image-label pairs and input images, this approach enables a flexible unification of various tasks, even those spanning different modalities and datasets. To capitalize on both local and global context, we design a hybrid method combining masked image modeling with autoregressive training for conditional image generation. This hybrid approach yields the most robust performance across all involved medical imaging tasks. To rigorously evaluate MVG's capabilities, we curated the first comprehensive generalist medical vision benchmark, comprising 13 datasets and spanning four imaging modalities (CT, MRI, X-ray, and micro-ultrasound). Our results consistently establish MVG's superior performance, outperforming existing vision generalists, such as Painter and LVM. Furthermore, MVG exhibits strong scalability, with its performance demonstrably improving when trained on a more diverse set of tasks, and can be effectively adapted to unseen datasets with only minimal task-specific samples. The code is available at \url{https://github.com/OliverRensu/MVG}.
PaLM2-VAdapter: Progressively Aligned Language Model Makes a Strong Vision-language Adapter
Feb 16, 2024This paper demonstrates that a progressively aligned language model can effectively bridge frozen vision encoders and large language models (LLMs). While the fundamental architecture and pre-training methods of vision encoders and LLMs have been extensively studied, the architecture and training strategy of vision-language adapters vary significantly across recent works. Our research undertakes a thorough exploration of the state-of-the-art perceiver resampler architecture and builds a strong baseline. However, we observe that the vision-language alignment with perceiver resampler exhibits slow convergence and limited scalability with a lack of direct supervision. To address this issue, we propose PaLM2-VAdapter, employing a progressively aligned language model as the vision-language adapter. Compared to the strong baseline with perceiver resampler, our method empirically shows faster convergence, higher performance, and stronger scalability. Extensive experiments across various Visual Question Answering (VQA) and captioning tasks on both images and videos demonstrate that our model exhibits state-of-the-art visual understanding and multi-modal reasoning capabilities. Notably, our method achieves these advancements with 30~70% fewer parameters than the state-of-the-art large vision-language models, marking a significant efficiency improvement.
A Semantic Space is Worth 256 Language Descriptions: Make Stronger Segmentation Models with Descriptive Properties
Dec 21, 2023



This paper introduces ProLab, a novel approach using property-level label space for creating strong interpretable segmentation models. Instead of relying solely on category-specific annotations, ProLab uses descriptive properties grounded in common sense knowledge for supervising segmentation models. It is based on two core designs. First, we employ Large Language Models (LLMs) and carefully crafted prompts to generate descriptions of all involved categories that carry meaningful common sense knowledge and follow a structured format. Second, we introduce a description embedding model preserving semantic correlation across descriptions and then cluster them into a set of descriptive properties (e.g., 256) using K-Means. These properties are based on interpretable common sense knowledge consistent with theories of human recognition. We empirically show that our approach makes segmentation models perform stronger on five classic benchmarks (e.g., ADE20K, COCO-Stuff, Pascal Context, Cityscapes, and BDD). Our method also shows better scalability with extended training steps than category-level supervision. Our interpretable segmentation framework also emerges with the generalization ability to segment out-of-domain or unknown categories using only in-domain descriptive properties. Code is available at https://github.com/lambert-x/ProLab.