 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Systems for Robotic Autonomy with LLMs
May 09, 2025Since the advent of Large Language Models (LLMs), various research based on such models have maintained significant academic attention and impact, especially in AI and robotics. In this paper, we propose a multi-agent framework with LLMs to construct an integrated system for robotic task analysis, mechanical design, and path generation. The framework includes three core agents: Task Analyst, Robot Designer, and Reinforcement Learning Designer. Outputs are formatted as multimodal results, such as code files or technical reports, for stronger understandability and usability. To evaluate generalizability comparatively, we conducted experiments with models from both GPT and DeepSeek. Results demonstrate that the proposed system can design feasible robots with control strategies when appropriate task inputs are provided, exhibiting substantial potential for enhancing the efficiency and accessibility of robotic system development in research and industrial applications.
RECOVER: Designing a Large Language Model-based Remote Patient Monitoring System for Postoperative Gastrointestinal Cancer Care
Feb 09, 2025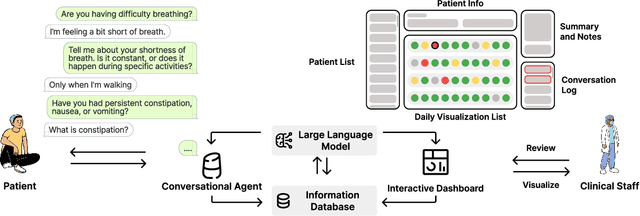
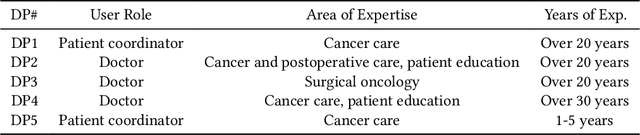
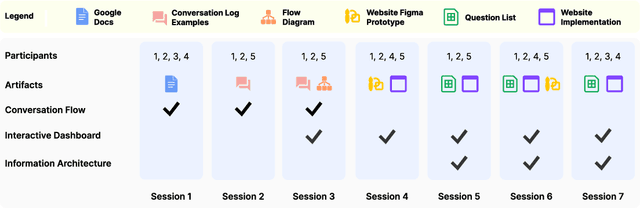
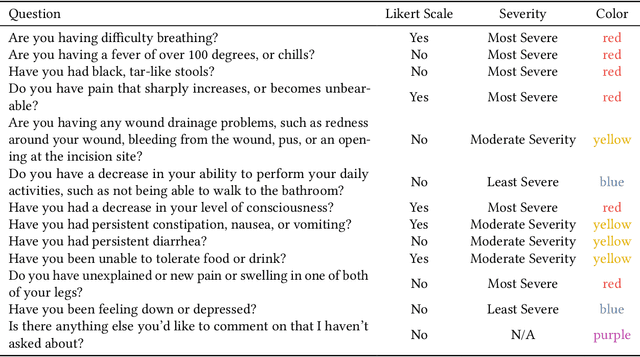
Cancer surgery is a key treatment for gastrointestinal (GI) cancers, a group of cancers that account for more than 35% of cancer-related deaths worldwide, but postoperative complications are unpredictable and can be life-threatening. In this paper, we investigate how recent advancements in large language models (LLMs) can benefit remote patient monitoring (RPM) systems through clinical integration by designing RECOVER, an LLM-powered RPM system for postoperative GI cancer care. To closely engage stakeholders in the design process, we first conducted seven participatory design sessions with five clinical staff and interviewed five cancer patients to derive six major design strategies for integrating clinical guidelines and information needs into LLM-based RPM systems. We then designed and implemented RECOVER, which features an LLM-powered conversational agent for cancer patients and an interactive dashboard for clinical staff to enable efficient postoperative RPM. Finally, we used RECOVER as a pilot system to assess the implementation of our design strategies with four clinical staff and five patients, providing design implications by identifying crucial design elements, offering insights on responsible AI, and outlining opportunities for future LLM-powered RPM systems.
On the Lack of Robustness of Binary Function Similarity Systems
Dec 05, 2024Binary function similarity, which often relies on learning-based algorithms to identify what functions in a pool are most similar to a given query function, is a sought-after topic in different communities, including machine learning, software engineering, and security. Its importance stems from the impact it has in facilitating several crucial tasks, from reverse engineering and malware analysis to automated vulnerability detection. Whereas recent work cast light around performance on this long-studied problem, the research landscape remains largely lackluster in understanding the resiliency of the state-of-the-art machine learning models against adversarial attacks. As security requires to reason about adversaries, in this work we assess the robustness of such models through a simple yet effective black-box greedy attack, which modifies the topology and the content of the control flow of the attacked functions. We demonstrate that this attack is successful in compromising all the models, achieving average attack success rates of 57.06% and 95.81% depending on the problem settings (targeted and untargeted attacks). Our findings are insightful: top performance on clean data does not necessarily relate to top robustness properties, which explicitly highlights performance-robustness trade-offs one should consider when deploying such models, calling for further research.
P4GCN: Vertical Federated Social Recommendation with Privacy-Preserving Two-Party Graph Convolution Networks
Oct 16, 2024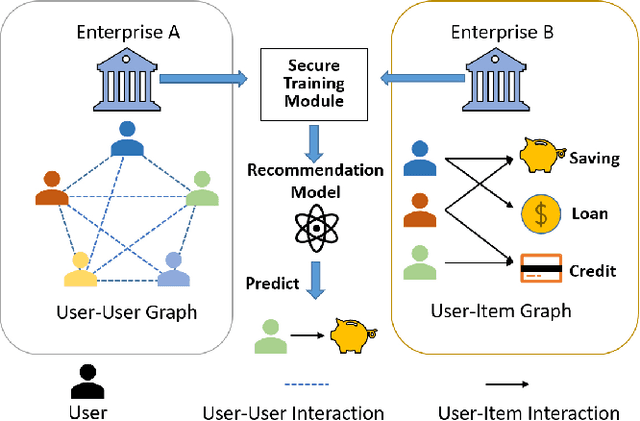
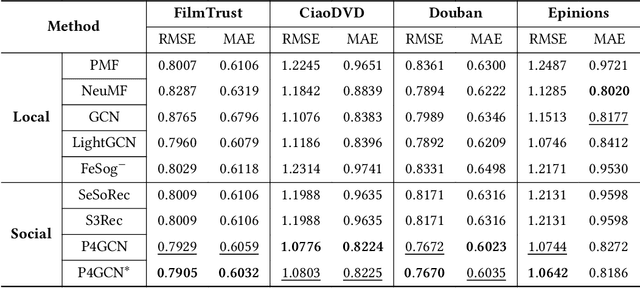

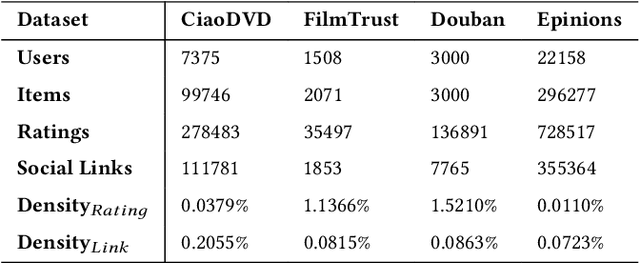
In recent years, graph neural networks (GNNs) have been commonly utilized for social recommendation systems. However, real-world scenarios often present challenges related to user privacy and business constraints, inhibiting direct access to valuable social information from other platforms. While many existing methods have tackled matrix factorization-based social recommendations without direct social data access, developing GNN-based federated social recommendation models under similar conditions remains largely unexplored. To address this issue, we propose a novel vertical federated social recommendation method leveraging privacy-preserving two-party graph convolution networks (P4GCN) to enhance recommendation accuracy without requiring direct access to sensitive social information. First, we introduce a Sandwich-Encryption module to ensure comprehensive data privacy during the collaborative computing process. Second, we provide a thorough theoretical analysis of the privacy guarantees, considering the participation of both curious and honest parties. Extensive experiments on four real-world datasets demonstrate that P4GCN outperforms state-of-the-art methods in terms of recommendation accuracy. The code is available at https://github.com/WwZzz/P4GCN.
Federated Graph Learning for Cross-Domain Recommendation
Oct 10, 2024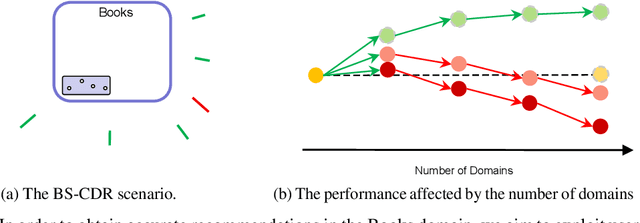
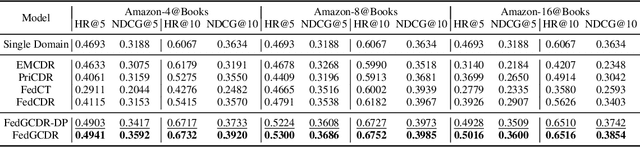
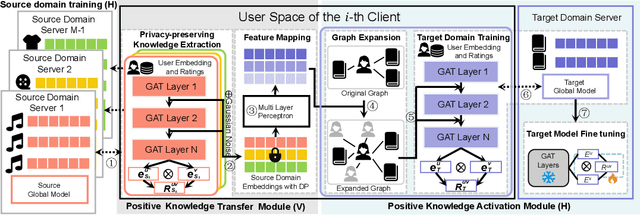
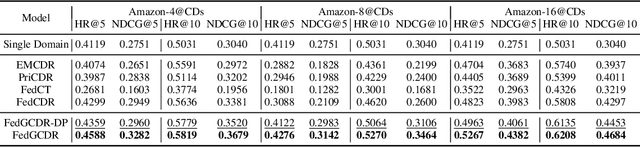
Cross-domain recommendation (CDR) offers a promising solution to the data sparsity problem by enabling knowledge transfer across source and target domains. However, many recent CDR models overlook crucial issues such as privacy as well as the risk of negative transfer (which negatively impact model performance), especially in multi-domain settings. To address these challenges, we propose FedGCDR, a novel federated graph learning framework that securely and effectively leverages positive knowledge from multiple source domains. First, we design a positive knowledge transfer module that ensures privacy during inter-domain knowledge transmission. This module employs differential privacy-based knowledge extraction combined with a feature mapping mechanism, transforming source domain embeddings from federated graph attention networks into reliable domain knowledge. Second, we design a knowledge activation module to filter out potential harmful or conflicting knowledge from source domains, addressing the issues of negative transfer. This module enhances target domain training by expanding the graph of the target domain to generate reliable domain attentions and fine-tunes the target model for improved negative knowledge filtering and more accurate predictions. We conduct extensive experiments on 16 popular domains of the Amazon dataset, demonstrating that FedGCDR significantly outperforms state-of-the-art methods.
MASKDROID: Robust Android Malware Detection with Masked Graph Representations
Sep 29, 2024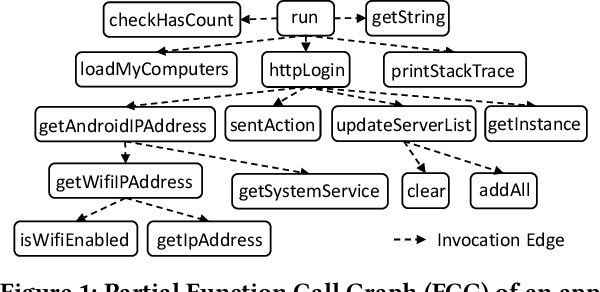
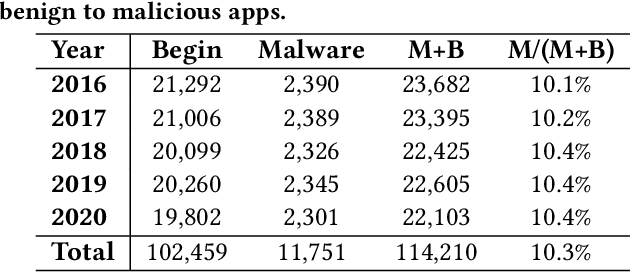
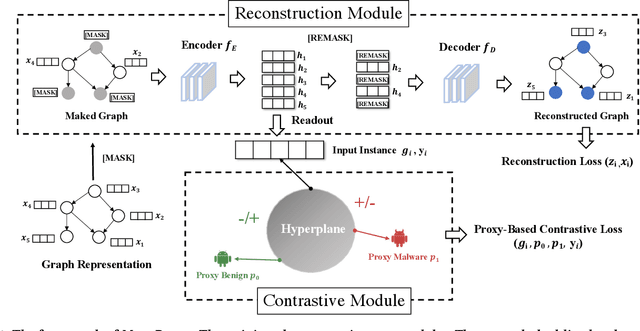
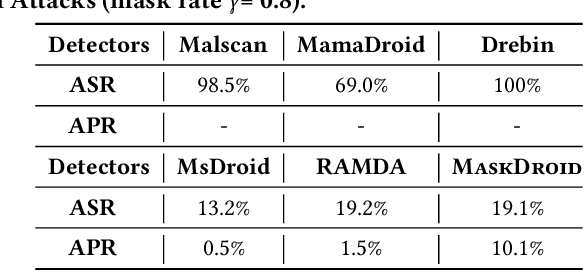
Android malware attacks have posed a severe threat to mobile users, necessitating a significant demand for the automated detection system. Among the various tools employed in malware detection, graph representations (e.g., function call graphs) have played a pivotal role in characterizing the behaviors of Android apps. However, though achieving impressive performance in malware detection, current state-of-the-art graph-based malware detectors are vulnerable to adversarial examples. These adversarial examples are meticulously crafted by introducing specific perturbations to normal malicious inputs. To defend against adversarial attacks, existing defensive mechanisms are typically supplementary additions to detectors and exhibit significant limitations, often relying on prior knowledge of adversarial examples and failing to defend against unseen types of attacks effectively. In this paper, we propose MASKDROID, a powerful detector with a strong discriminative ability to identify malware and remarkable robustness against adversarial attacks. Specifically, we introduce a masking mechanism into the Graph Neural Network (GNN) based framework, forcing MASKDROID to recover the whole input graph using a small portion (e.g., 20%) of randomly selected nodes.This strategy enables the model to understand the malicious semantics and learn more stable representations, enhancing its robustness against adversarial attacks. While capturing stable malicious semantics in the form of dependencies inside the graph structures, we further employ a contrastive module to encourage MASKDROID to learn more compact representations for both the benign and malicious classes to boost its discriminative power in detecting malware from benign apps and adversarial examples.
Joint-Motion Mutual Learning for Pose Estimation in Videos
Aug 05, 2024Human pose estimation in videos has long been a compelling yet challenging task within the realm of computer vision. Nevertheless, this task remains difficult because of the complex video scenes, such as video defocus and self-occlusion. Recent methods strive to integrate multi-frame visual features generated by a backbone network for pose estimation. However, they often ignore the useful joint information encoded in the initial heatmap, which is a by-product of the backbone generation. Comparatively, methods that attempt to refine the initial heatmap fail to consider any spatio-temporal motion features. As a result, the performance of existing methods for pose estimation falls short due to the lack of ability to leverage both local joint (heatmap) information and global motion (feature) dynamics. To address this problem, we propose a novel joint-motion mutual learning framework for pose estimation, which effectively concentrates on both local joint dependency and global pixel-level motion dynamics. Specifically, we introduce a context-aware joint learner that adaptively leverages initial heatmaps and motion flow to retrieve robust local joint feature. Given that local joint feature and global motion flow are complementary, we further propose a progressive joint-motion mutual learning that synergistically exchanges information and interactively learns between joint feature and motion flow to improve the capability of the model. More importantly, to capture more diverse joint and motion cues, we theoretically analyze and propose an information orthogonality objective to avoid learning redundant information from multi-cues. Empirical experiments show our method outperforms prior arts on three challenging benchmarks.
Unveiling Privacy Vulnerabilities: Investigating the Role of Structure in Graph Data
Jul 26, 2024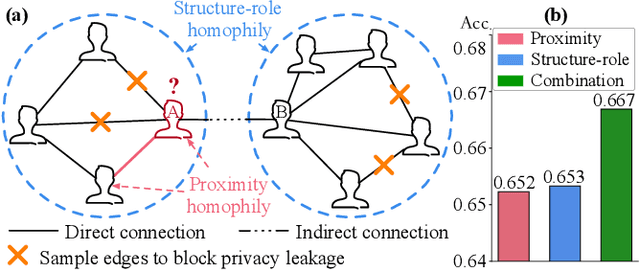
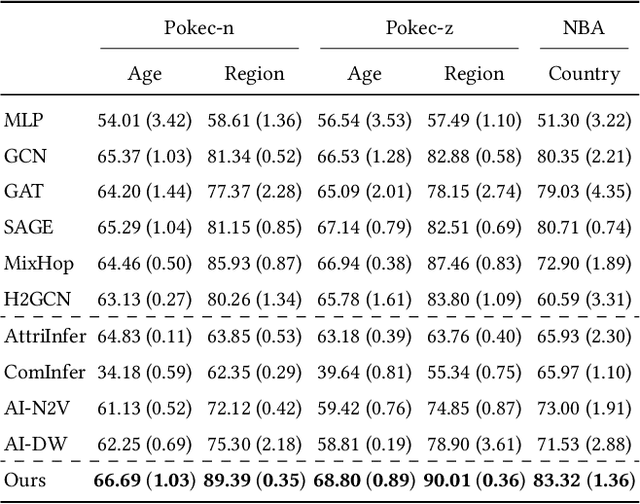
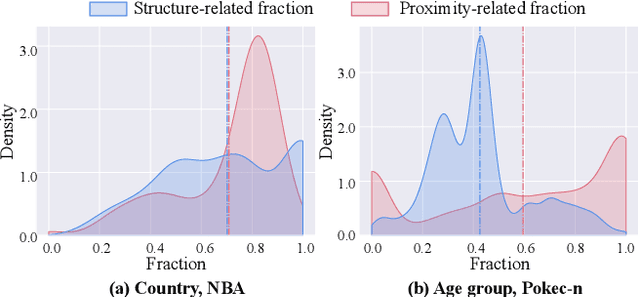
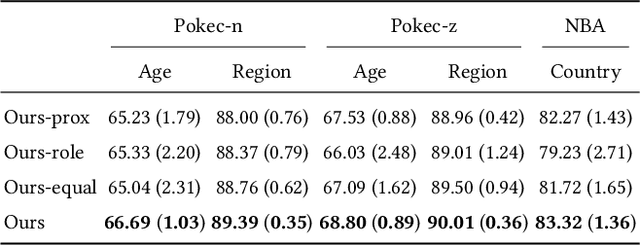
The public sharing of user information opens the door for adversaries to infer private data, leading to privacy breaches and facilitating malicious activities. While numerous studies have concentrated on privacy leakage via public user attributes, the threats associated with the exposure of user relationships, particularly through network structure, are often neglected. This study aims to fill this critical gap by advancing the understanding and protection against privacy risks emanating from network structure, moving beyond direct connections with neighbors to include the broader implications of indirect network structural patterns. To achieve this, we first investigate the problem of Graph Privacy Leakage via Structure (GPS), and introduce a novel measure, the Generalized Homophily Ratio, to quantify the various mechanisms contributing to privacy breach risks in GPS. Based on this insight, we develop a novel graph private attribute inference attack, which acts as a pivotal tool for evaluating the potential for privacy leakage through network structures under worst-case scenarios. To protect users' private data from such vulnerabilities, we propose a graph data publishing method incorporating a learnable graph sampling technique, effectively transforming the original graph into a privacy-preserving version. Extensive experiments demonstrate that our attack model poses a significant threat to user privacy, and our graph data publishing method successfully achieves the optimal privacy-utility trade-off compared to baselines.
Enhancing Security in Multi-Robot Systems through Co-Observation Planning, Reachability Analysis, and Network Flow
Mar 20, 2024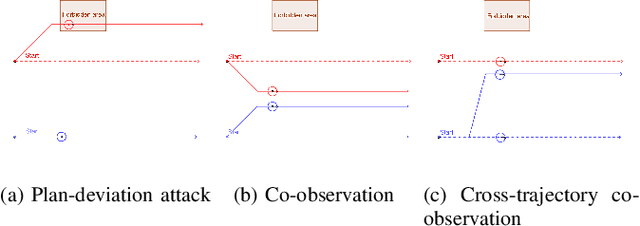
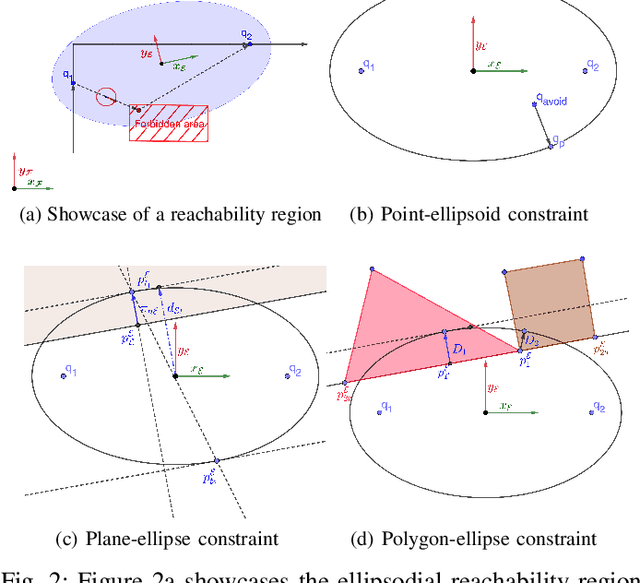
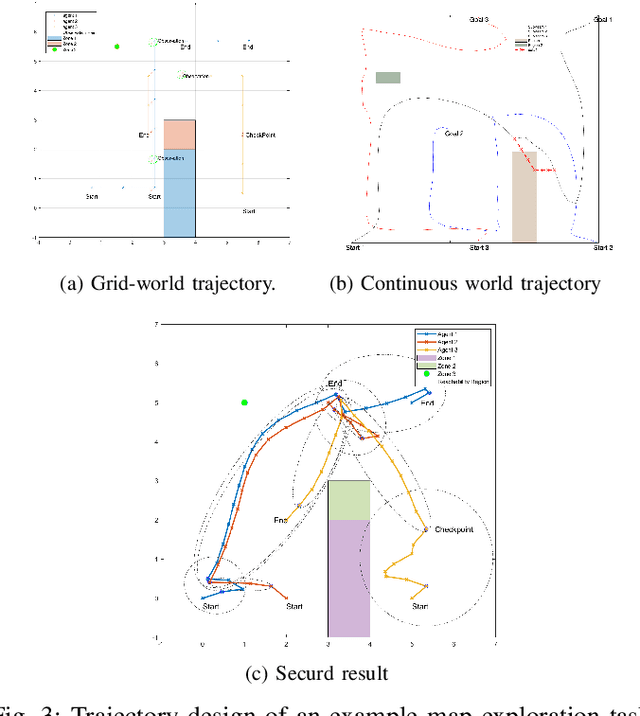
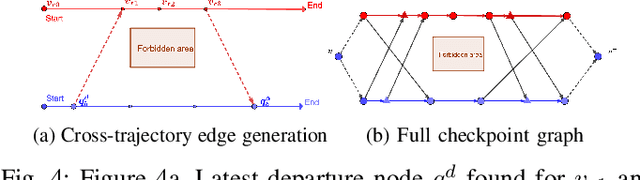
This paper addresses security challenges in multi-robot systems (MRS) where adversaries may compromise robot control, risking unauthorized access to forbidden areas. We propose a novel multi-robot optimal planning algorithm that integrates mutual observations and introduces reachability constraints for enhanced security. This ensures that, even with adversarial movements, compromised robots cannot breach forbidden regions without missing scheduled co-observations. The reachability constraint uses ellipsoidal over-approximation for efficient intersection checking and gradient computation. To enhance system resilience and tackle feasibility challenges, we also introduce sub-teams. These cohesive units replace individual robot assignments along each route, enabling redundant robots to deviate for co-observations across different trajectories, securing multiple sub-teams without requiring modifications. We formulate the cross-trajectory co-observation plan by solving a network flow coverage problem on the checkpoint graph generated from the original unsecured MRS trajectories, providing the same security guarantees against plan-deviation attacks. We demonstrate the effectiveness and robustness of our proposed algorithm, which significantly strengthens the security of multi-robot systems in the face of adversarial threats.
Towards Fair Graph Federated Learning via Incentive Mechanisms
Dec 20, 2023
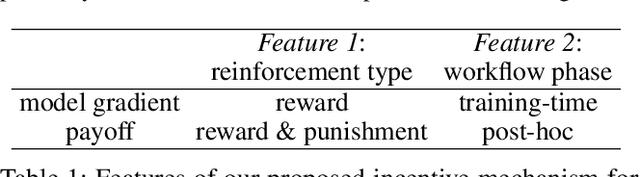
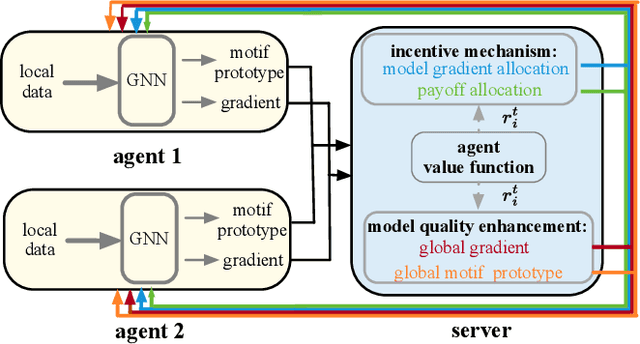
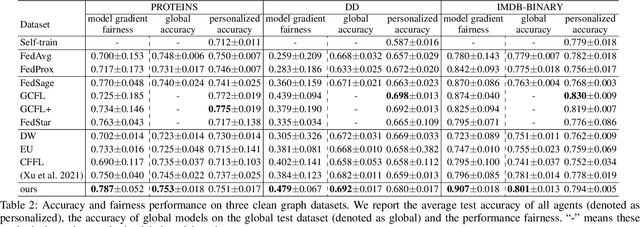
Graph federated learning (FL) has emerged as a pivotal paradigm enabling multiple agents to collaboratively train a graph model while preserving local data privacy. Yet, current efforts overlook a key issue: agents are self-interested and would hesitant to share data without fair and satisfactory incentives. This paper is the first endeavor to address this issue by studying the incentive mechanism for graph federated learning. We identify a unique phenomenon in graph federated learning: the presence of agents posing potential harm to the federation and agents contributing with delays. This stands in contrast to previous FL incentive mechanisms that assume all agents contribute positively and in a timely manner. In view of this, this paper presents a novel incentive mechanism tailored for fair graph federated learning, integrating incentives derived from both model gradient and payoff. To achieve this, we first introduce an agent valuation function aimed at quantifying agent contributions through the introduction of two criteria: gradient alignment and graph diversity. Moreover, due to the high heterogeneity in graph federated learning, striking a balance between accuracy and fairness becomes particularly crucial. We introduce motif prototypes to enhance accuracy, communicated between the server and agents, enhancing global model aggregation and aiding agents in local model optimization. Extensive experiments show that our model achieves the best trade-off between accuracy and the fairness of model gradient, as well as superior payoff fairness.