 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen CNNs Outperform Transformers and Mambas: Revisiting Deep Architectures for Dental Caries Segmentation
Nov 18, 2025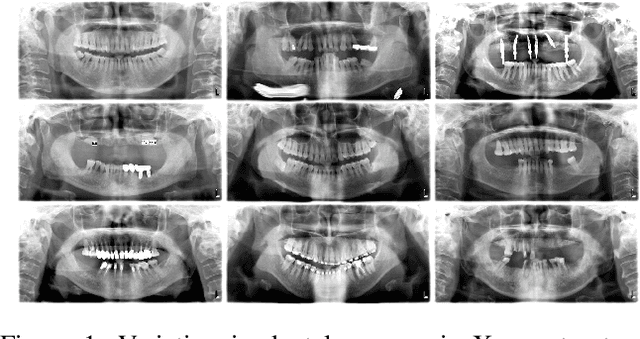
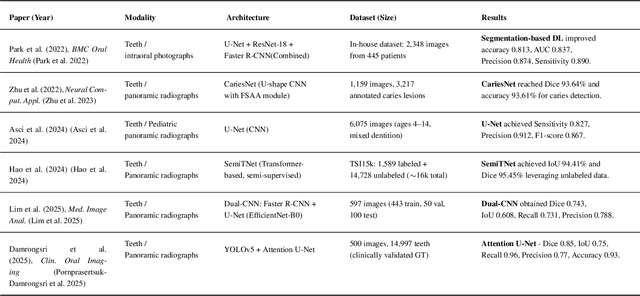
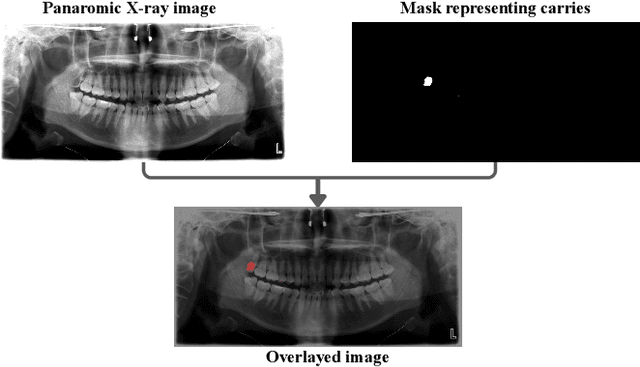
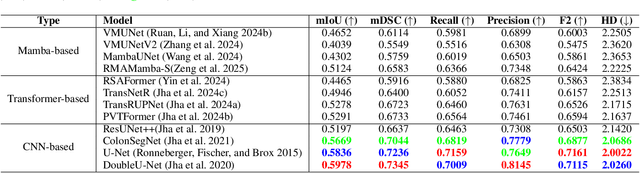
Accurate identification and segmentation of dental caries in panoramic radiographs are critical for early diagnosis and effective treatment planning. Automated segmentation remains challenging due to low lesion contrast, morphological variability, and limited annotated data. In this study, we present the first comprehensive benchmarking of convolutional neural networks, vision transformers and state-space mamba architectures for automated dental caries segmentation on panoramic radiographs through a DC1000 dataset. Twelve state-of-the-art architectures, including VMUnet, MambaUNet, VMUNetv2, RMAMamba-S, TransNetR, PVTFormer, DoubleU-Net, and ResUNet++, were trained under identical configurations. Results reveal that, contrary to the growing trend toward complex attention based architectures, the CNN-based DoubleU-Net achieved the highest dice coefficient of 0.7345, mIoU of 0.5978, and precision of 0.8145, outperforming all transformer and Mamba variants. In the study, the top 3 results across all performance metrics were achieved by CNN-based architectures. Here, Mamba and transformer-based methods, despite their theoretical advantage in global context modeling, underperformed due to limited data and weaker spatial priors. These findings underscore the importance of architecture-task alignment in domain-specific medical image segmentation more than model complexity. Our code is available at: https://github.com/JunZengz/dental-caries-segmentation.
SRMA-Mamba: Spatial Reverse Mamba Attention Network for Pathological Liver Segmentation in MRI Volumes
Aug 17, 2025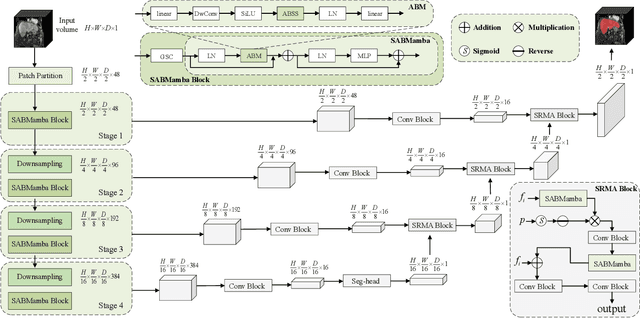

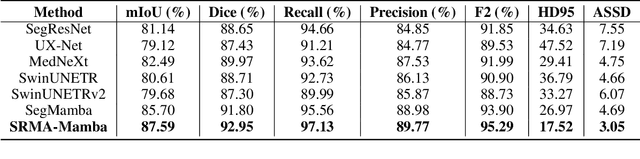
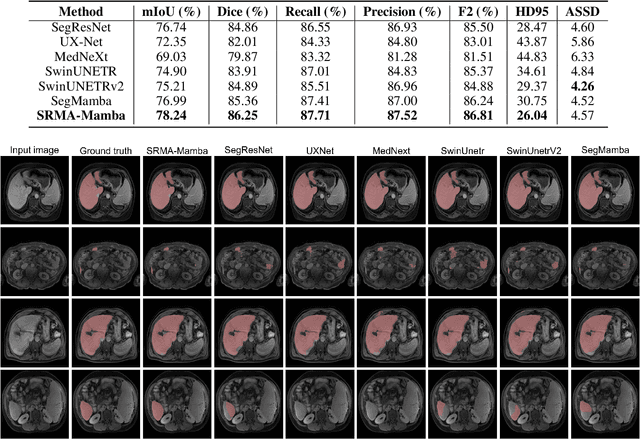
Liver Cirrhosis plays a critical role in the prognosis of chronic liver disease. Early detection and timely intervention are critical in significantly reducing mortality rates. However, the intricate anatomical architecture and diverse pathological changes of liver tissue complicate the accurate detection and characterization of lesions in clinical settings. Existing methods underutilize the spatial anatomical details in volumetric MRI data, thereby hindering their clinical effectiveness and explainability. To address this challenge, we introduce a novel Mamba-based network, SRMA-Mamba, designed to model the spatial relationships within the complex anatomical structures of MRI volumes. By integrating the Spatial Anatomy-Based Mamba module (SABMamba), SRMA-Mamba performs selective Mamba scans within liver cirrhotic tissues and combines anatomical information from the sagittal, coronal, and axial planes to construct a global spatial context representation, enabling efficient volumetric segmentation of pathological liver structures. Furthermore, we introduce the Spatial Reverse Attention module (SRMA), designed to progressively refine cirrhotic details in the segmentation map, utilizing both the coarse segmentation map and hierarchical encoding features. Extensive experiments demonstrate that SRMA-Mamba surpasses state-of-the-art methods, delivering exceptional performance in 3D pathological liver segmentation. Our code is available for public: {\color{blue}{https://github.com/JunZengz/SRMA-Mamba}}.
Road Similarity-Based BEV-Satellite Image Matching for UGV Localization
Apr 23, 2025To address the challenge of autonomous UGV localization in GNSS-denied off-road environments,this study proposes a matching-based localization method that leverages BEV perception image and satellite map within a road similarity space to achieve high-precision positioning.We first implement a robust LiDAR-inertial odometry system, followed by the fusion of LiDAR and image data to generate a local BEV perception image of the UGV. This approach mitigates the significant viewpoint discrepancy between ground-view images and satellite map. The BEV image and satellite map are then projected into the road similarity space, where normalized cross correlation (NCC) is computed to assess the matching score.Finally, a particle filter is employed to estimate the probability distribution of the vehicle's pose.By comparing with GNSS ground truth, our localization system demonstrated stability without divergence over a long-distance test of 10 km, achieving an average lateral error of only 0.89 meters and an average planar Euclidean error of 3.41 meters. Furthermore, it maintained accurate and stable global localization even under nighttime conditions, further validating its robustness and adaptability.
FocusNet: Transformer-enhanced Polyp Segmentation with Local and Pooling Attention
Apr 18, 2025Colonoscopy is vital in the early diagnosis of colorectal polyps. Regular screenings can effectively prevent benign polyps from progressing to CRC. While deep learning has made impressive strides in polyp segmentation, most existing models are trained on single-modality and single-center data, making them less effective in real-world clinical environments. To overcome these limitations, we propose FocusNet, a Transformer-enhanced focus attention network designed to improve polyp segmentation. FocusNet incorporates three essential modules: the Cross-semantic Interaction Decoder Module (CIDM) for generating coarse segmentation maps, the Detail Enhancement Module (DEM) for refining shallow features, and the Focus Attention Module (FAM), to balance local detail and global context through local and pooling attention mechanisms. We evaluate our model on PolypDB, a newly introduced dataset with multi-modality and multi-center data for building more reliable segmentation methods. Extensive experiments showed that FocusNet consistently outperforms existing state-of-the-art approaches with a high dice coefficients of 82.47% on the BLI modality, 88.46% on FICE, 92.04% on LCI, 82.09% on the NBI and 93.42% on WLI modality, demonstrating its accuracy and robustness across five different modalities. The source code for FocusNet is available at https://github.com/JunZengz/FocusNet.
Self-Supervised Traversability Learning with Online Prototype Adaptation for Off-Road Autonomous Driving
Apr 16, 2025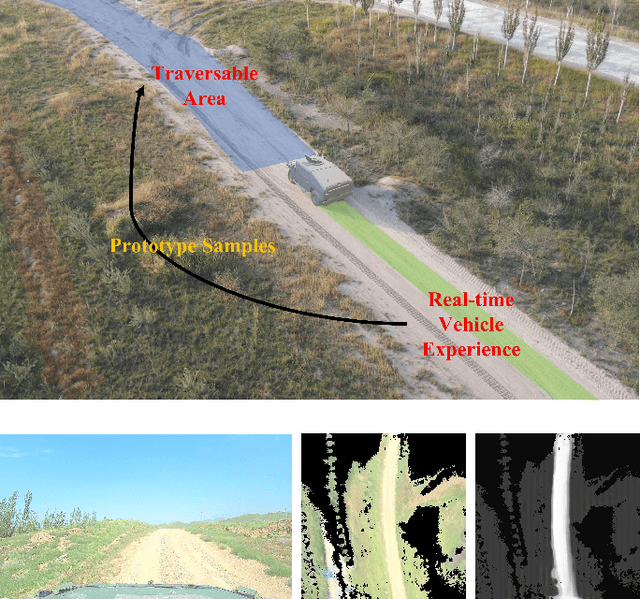
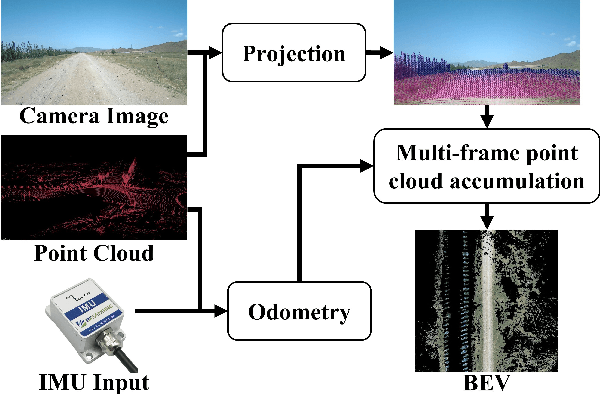
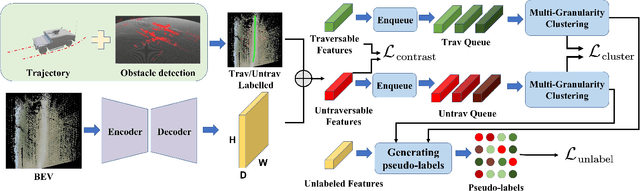
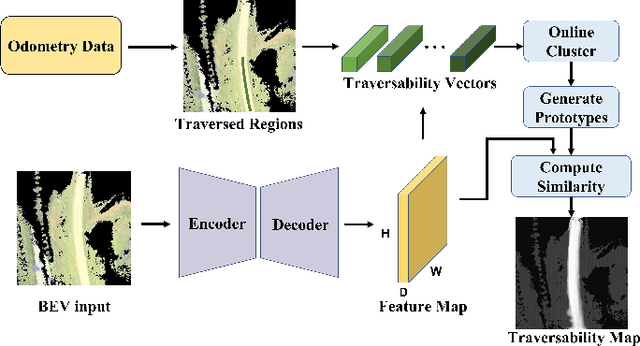
Achieving reliable and safe autonomous driving in off-road environments requires accurate and efficient terrain traversability analysis. However, this task faces several challenges, including the scarcity of large-scale datasets tailored for off-road scenarios, the high cost and potential errors of manual annotation, the stringent real-time requirements of motion planning, and the limited computational power of onboard units. To address these challenges, this paper proposes a novel traversability learning method that leverages self-supervised learning, eliminating the need for manual annotation. For the first time, a Birds-Eye View (BEV) representation is used as input, reducing computational burden and improving adaptability to downstream motion planning. During vehicle operation, the proposed method conducts online analysis of traversed regions and dynamically updates prototypes to adaptively assess the traversability of the current environment, effectively handling dynamic scene changes. We evaluate our approach against state-of-the-art benchmarks on both public datasets and our own dataset, covering diverse seasons and geographical locations. Experimental results demonstrate that our method significantly outperforms recent approaches. Additionally, real-world vehicle experiments show that our method operates at 10 Hz, meeting real-time requirements, while a 5.5 km autonomous driving experiment further validates the generated traversability cost maps compatibility with downstream motion planning.
Liver Cirrhosis Stage Estimation from MRI with Deep Learning
Feb 23, 2025We present an end-to-end deep learning framework for automated liver cirrhosis stage estimation from multi-sequence MRI. Cirrhosis is the severe scarring (fibrosis) of the liver and a common endpoint of various chronic liver diseases. Early diagnosis is vital to prevent complications such as decompensation and cancer, which significantly decreases life expectancy. However, diagnosing cirrhosis in its early stages is challenging, and patients often present with life-threatening complications. Our approach integrates multi-scale feature learning with sequence-specific attention mechanisms to capture subtle tissue variations across cirrhosis progression stages. Using CirrMRI600+, a large-scale publicly available dataset of 628 high-resolution MRI scans from 339 patients, we demonstrate state-of-the-art performance in three-stage cirrhosis classification. Our best model achieves 72.8% accuracy on T1W and 63.8% on T2W sequences, significantly outperforming traditional radiomics-based approaches. Through extensive ablation studies, we show that our architecture effectively learns stage-specific imaging biomarkers. We establish new benchmarks for automated cirrhosis staging and provide insights for developing clinically applicable deep learning systems. The source code will be available at https://github.com/JunZengz/CirrhosisStage.
A Reverse Mamba Attention Network for Pathological Liver Segmentation
Feb 23, 2025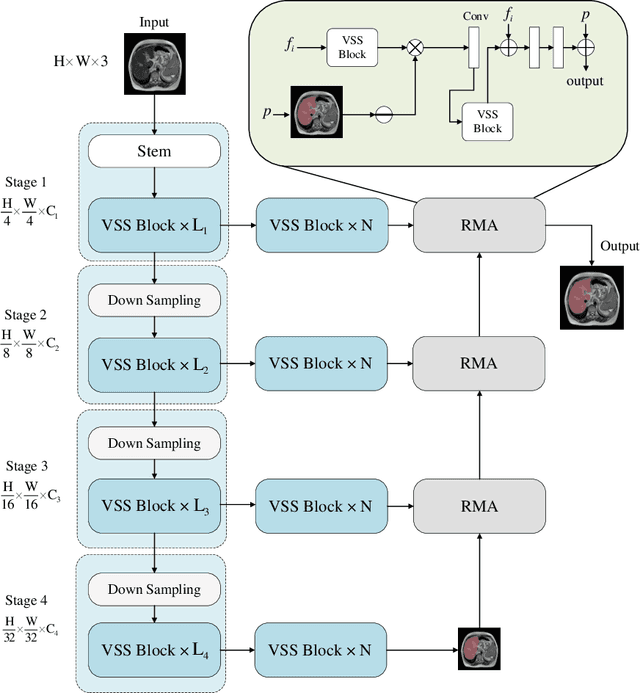



We present RMA-Mamba, a novel architecture that advances the capabilities of vision state space models through a specialized reverse mamba attention module (RMA). The key innovation lies in RMA-Mamba's ability to capture long-range dependencies while maintaining precise local feature representation through its hierarchical processing pipeline. By integrating Vision Mamba (VMamba)'s efficient sequence modeling with RMA's targeted feature refinement, our architecture achieves superior feature learning across multiple scales. This dual-mechanism approach enables robust handling of complex morphological patterns while maintaining computational efficiency. We demonstrate RMA-Mamba's effectiveness in the challenging domain of pathological liver segmentation (from both CT and MRI), where traditional segmentation approaches often fail due to tissue variations. When evaluated on a newly introduced cirrhotic liver dataset (CirrMRI600+) of T2-weighted MRI scans, RMA-Mamba achieves the state-of-the-art performance with a Dice coefficient of 92.08%, mean IoU of 87.36%, and recall of 92.96%. The architecture's generalizability is further validated on the cancerous liver segmentation from CT scans (LiTS: Liver Tumor Segmentation dataset), yielding a Dice score of 92.9% and mIoU of 88.99%. The source code of the proposed RMA-Mamba is available at https://github.com/JunZengz/RMAMamba.
Adaptive Learning-based Model Predictive Control Strategy for Drift Vehicles
Feb 07, 2025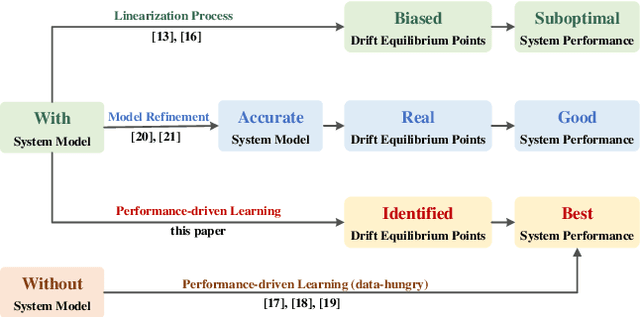
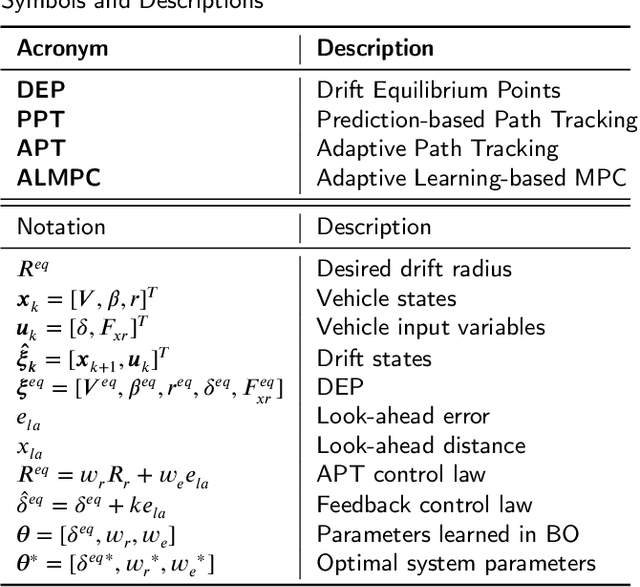
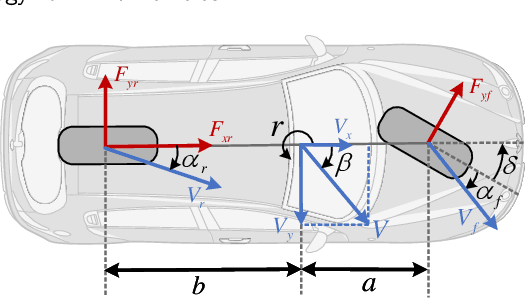
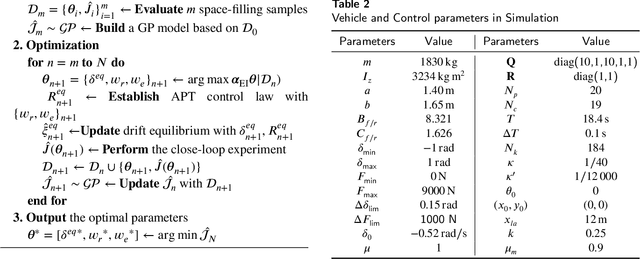
Drift vehicle control offers valuable insights to support safe autonomous driving in extreme conditions, which hinges on tracking a particular path while maintaining the vehicle states near the drift equilibrium points (DEP). However, conventional tracking methods are not adaptable for drift vehicles due to their opposite steering angle and yaw rate. In this paper, we propose an adaptive path tracking (APT) control method to dynamically adjust drift states to follow the reference path, improving the commonly utilized predictive path tracking methods with released computation burden. Furthermore, existing control strategies necessitate a precise system model to calculate the DEP, which can be more intractable due to the highly nonlinear drift dynamics and sensitive vehicle parameters. To tackle this problem, an adaptive learning-based model predictive control (ALMPC) strategy is proposed based on the APT method, where an upper-level Bayesian optimization is employed to learn the DEP and APT control law to instruct a lower-level MPC drift controller. This hierarchical system architecture can also resolve the inherent control conflict between path tracking and drifting by separating these objectives into different layers. The ALMPC strategy is verified on the Matlab-Carsim platform, and simulation results demonstrate its effectiveness in controlling the drift vehicle to follow a clothoid-based reference path even with the misidentified road friction parameter.
MASKDROID: Robust Android Malware Detection with Masked Graph Representations
Sep 29, 2024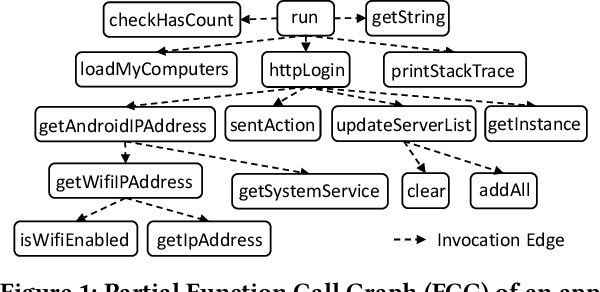
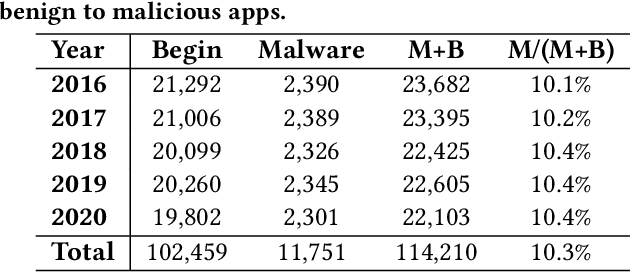
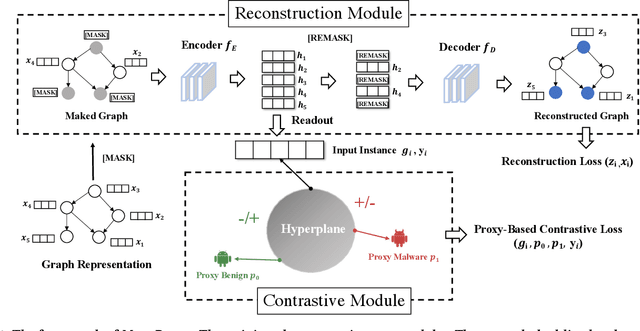
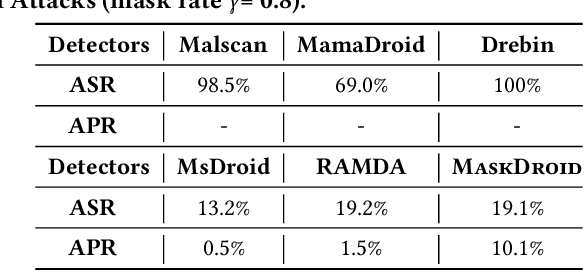
Android malware attacks have posed a severe threat to mobile users, necessitating a significant demand for the automated detection system. Among the various tools employed in malware detection, graph representations (e.g., function call graphs) have played a pivotal role in characterizing the behaviors of Android apps. However, though achieving impressive performance in malware detection, current state-of-the-art graph-based malware detectors are vulnerable to adversarial examples. These adversarial examples are meticulously crafted by introducing specific perturbations to normal malicious inputs. To defend against adversarial attacks, existing defensive mechanisms are typically supplementary additions to detectors and exhibit significant limitations, often relying on prior knowledge of adversarial examples and failing to defend against unseen types of attacks effectively. In this paper, we propose MASKDROID, a powerful detector with a strong discriminative ability to identify malware and remarkable robustness against adversarial attacks. Specifically, we introduce a masking mechanism into the Graph Neural Network (GNN) based framework, forcing MASKDROID to recover the whole input graph using a small portion (e.g., 20%) of randomly selected nodes.This strategy enables the model to understand the malicious semantics and learn more stable representations, enhancing its robustness against adversarial attacks. While capturing stable malicious semantics in the form of dependencies inside the graph structures, we further employ a contrastive module to encourage MASKDROID to learn more compact representations for both the benign and malicious classes to boost its discriminative power in detecting malware from benign apps and adversarial examples.
Virtual Foundry Graphnet for Metal Sintering Deformation Prediction
Apr 17, 2024



Metal Sintering is a necessary step for Metal Injection Molded parts and binder jet such as HP's metal 3D printer. The metal sintering process introduces large deformation varying from 25 to 50% depending on the green part porosity. In this paper, we use a graph-based deep learning approach to predict the part deformation, which can speed up the deformation simulation substantially at the voxel level. Running a well-trained Metal Sintering inferencing engine only takes a range of seconds to obtain the final sintering deformation value. The tested accuracy on example complex geometry achieves 0.7um mean deviation for a 63mm testing part.