 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Similarity-Based BEV-Satellite Image Matching for UGV Localization
Apr 23, 2025To address the challenge of autonomous UGV localization in GNSS-denied off-road environments,this study proposes a matching-based localization method that leverages BEV perception image and satellite map within a road similarity space to achieve high-precision positioning.We first implement a robust LiDAR-inertial odometry system, followed by the fusion of LiDAR and image data to generate a local BEV perception image of the UGV. This approach mitigates the significant viewpoint discrepancy between ground-view images and satellite map. The BEV image and satellite map are then projected into the road similarity space, where normalized cross correlation (NCC) is computed to assess the matching score.Finally, a particle filter is employed to estimate the probability distribution of the vehicle's pose.By comparing with GNSS ground truth, our localization system demonstrated stability without divergence over a long-distance test of 10 km, achieving an average lateral error of only 0.89 meters and an average planar Euclidean error of 3.41 meters. Furthermore, it maintained accurate and stable global localization even under nighttime conditions, further validating its robustness and adaptability.
Self-Supervised Traversability Learning with Online Prototype Adaptation for Off-Road Autonomous Driving
Apr 16, 2025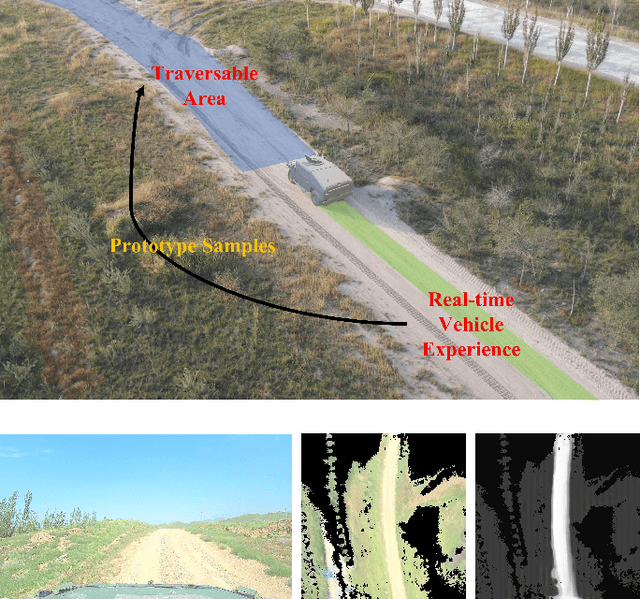
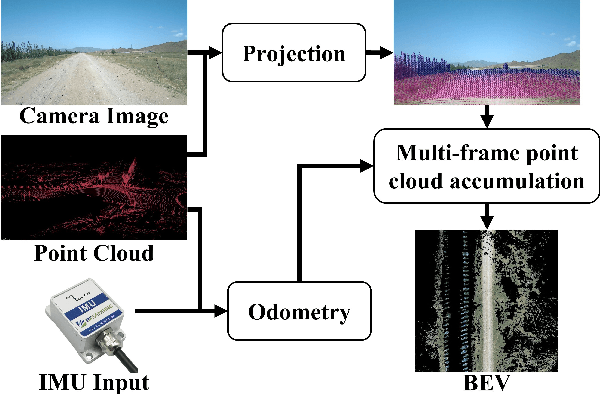
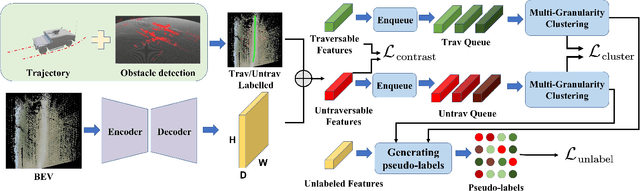
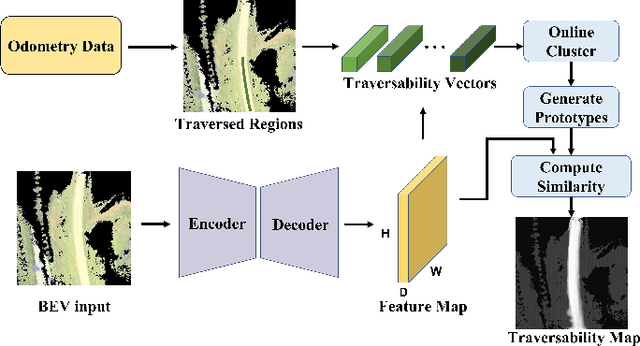
Achieving reliable and safe autonomous driving in off-road environments requires accurate and efficient terrain traversability analysis. However, this task faces several challenges, including the scarcity of large-scale datasets tailored for off-road scenarios, the high cost and potential errors of manual annotation, the stringent real-time requirements of motion planning, and the limited computational power of onboard units. To address these challenges, this paper proposes a novel traversability learning method that leverages self-supervised learning, eliminating the need for manual annotation. For the first time, a Birds-Eye View (BEV) representation is used as input, reducing computational burden and improving adaptability to downstream motion planning. During vehicle operation, the proposed method conducts online analysis of traversed regions and dynamically updates prototypes to adaptively assess the traversability of the current environment, effectively handling dynamic scene changes. We evaluate our approach against state-of-the-art benchmarks on both public datasets and our own dataset, covering diverse seasons and geographical locations. Experimental results demonstrate that our method significantly outperforms recent approaches. Additionally, real-world vehicle experiments show that our method operates at 10 Hz, meeting real-time requirements, while a 5.5 km autonomous driving experiment further validates the generated traversability cost maps compatibility with downstream motion planning.
SceneTracker: Long-term Scene Flow Estimation Network
Mar 29, 2024

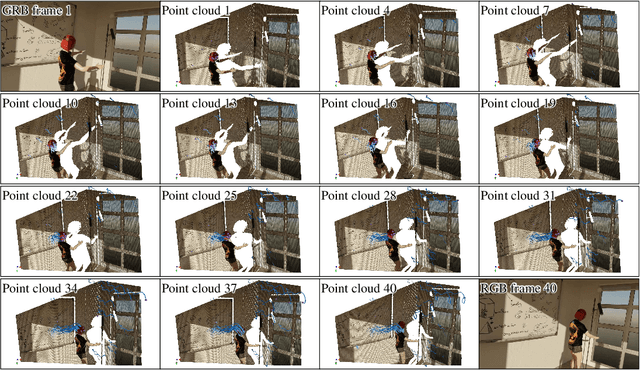

Considering the complementarity of scene flow estimation in the spatial domain's focusing capability and 3D object tracking in the temporal domain's coherence, this study aims to address a comprehensive new task that can simultaneously capture fine-grained and long-term 3D motion in an online manner: long-term scene flow estimation (LSFE). We introduce SceneTracker, a novel learning-based LSFE network that adopts an iterative approach to approximate the optimal trajectory. Besides, it dynamically indexes and constructs appearance and depth correlation features simultaneously and employs the Transformer to explore and utilize long-range connections within and between trajectories. With detailed experiments, SceneTracker shows superior capabilities in handling 3D spatial occlusion and depth noise interference, highly tailored to the LSFE task's needs. The code for SceneTracker is available at https://github.com/wwsource/SceneTracker.
SplatFlow: Learning Multi-frame Optical Flow via Splatting
Jun 15, 2023Occlusion problem remains a key challenge in Optical Flow Estimation (OFE) despite the recent significant progress brought by deep learning in the field. Most existing deep learning OFE methods, especially those based on two frames, cannot properly handle occlusions, in part because there is no significant feature similarity in occluded regions. The multi-frame settings have the potential to mitigate the occlusion issue in OFE. However, the problem of Multi-frame OFE (MOFE) remains underexplored, and the limited works are specially designed for pyramid backbones and obtain the aligned temporal information by time-consuming backward flow calculation or non-differentiable forward warping transformation. To address these shortcomings, we propose an efficient MOFE framework named SplatFlow, which is realized by introducing the differentiable splatting transformation to align the temporal information, designing a One-to-Many embedding method to densely guide the current frame's estimation, and further remodelling the existing two-frame backbones. The proposed SplatFlow is very efficient yet more accurate as it is able to handle occlusions properly. Extensive experimental evaluations show that our SplatFlow substantially outperforms all published methods on KITTI2015 and Sintel benchmarks. Especially on Sintel benchmark, SplatFlow achieves errors of 1.12 (clean pass) and 2.07 (final pass), with surprisingly significant 19.4% and 16.2% error reductions from the previous best results submitted, respectively. Code is available at https://github.com/wwsource/SplatFlow.
Synchronous Maneuver Searching and Trajectory Planning for Autonomous Vehicles in Dynamic Traffic Environments
Sep 17, 2019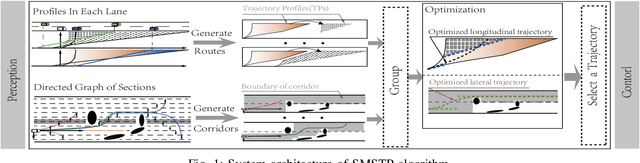
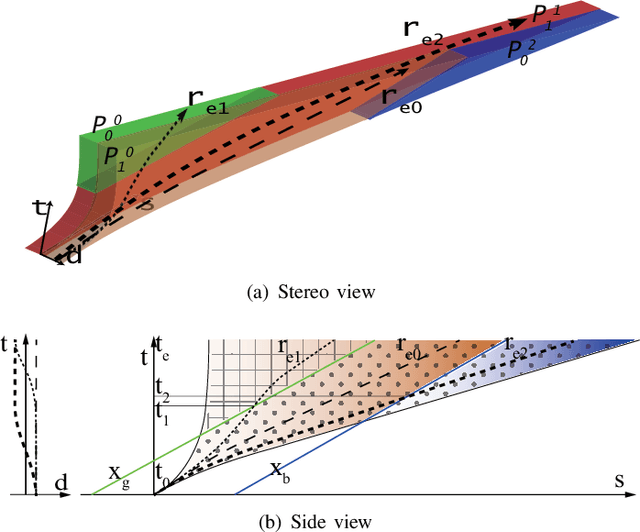
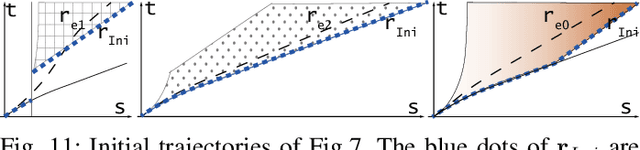
In the real-time decision-making and local planning process of autonomous vehicles in dynamic environments, the autonomous driving system may fail to find a reasonable policy or even gets trapped in some situation due to the complexity of global tasks and the incompatibility between upper-level maneuver decisions with the low-level lower level trajectory planning. To solve this problem, this paper presents a synchronous maneuver searching and trajectory planning (SMSTP) algorithm based on the topological concept of homotopy. Firstly, a set of alternative maneuvers with boundary limits are enumerated on a multi-lane road. Instead of sampling numerous paths in the whole spatio-temporal space, we, for the first time, propose using Trajectory Profiles (TPs) to quickly construct the topological maneuvers represented by different routes, and put forward a corridor generation algorithm based on graph-search. The bounded corridor further constrains the maneuver's space in the spatial space. A step-wise heuristic optimization algorithm is then proposed to synchronously generate a feasible trajectory for each maneuver. To achieve real-time performance, we initialize the states to be optimized with the boundary constraints of maneuvers, and we set some heuristic states as terminal targets in the quadratic cost function. The solution of a feasible trajectory is always guaranteed only if a specific maneuver is given. The simulation and realistic driving-test experiments verified that the proposed SMSTP algorithm has a short computation time which is less than 37ms, and the experimental results showed the validity and effectiveness of the SMSTP algorithm.