 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHARP: Spectrum-aware Highly-dynamic Adaptation for Resolution Promotion in Remote Sensing Synthesis
Mar 23, 2026Text-to-image generation powered by Diffusion Transformers (DiTs) has made remarkable strides, yet remote sensing (RS) synthesis lags behind due to two barriers: the absence of a domain-specialized DiT prior and the prohibitive cost of training at the large resolutions that RS applications demand. Training-free resolution promotion via Rotary Position Embedding (RoPE) rescaling offers a practical remedy, but every existing method applies a static positional scaling rule throughout the denoising process. This uniform compression is particularly harmful for RS imagery, whose substantially denser medium- and high-frequency energy encodes the fine structures critical for aerial-scene realism, such as vehicles, building contours, and road markings. Addressing both challenges requires a domain-specialized generative prior coupled with a denoising-aware positional adaptation strategy. To this end, we fine-tune FLUX on over 100,000 curated RS images to build a strong domain prior (RS-FLUX), and propose Spectrum-aware Highly-dynamic Adaptation for Resolution Promotion (SHARP), a training-free method that introduces a rational fractional time schedule k_rs(t) into RoPE. SHARP applies strong positional promotion during the early layout-formation stage and progressively relaxes it during detail recovery, aligning extrapolation strength with the frequency-progressive nature of diffusion denoising. Its resolution-agnostic formulation further enables robust multi-scale generation from a single set of hyperparameters. Extensive experiments across six square and rectangular resolutions show that SHARP consistently outperforms all training-free baselines on CLIP Score, Aesthetic Score, and HPSv2, with widening margins at more aggressive extrapolation factors and negligible computational overhead. Code and weights are available at https://github.com/bxuanz/SHARP.
ELLMob: Event-Driven Human Mobility Generation with Self-Aligned LLM Framework
Mar 09, 2026Human mobility generation aims to synthesize plausible trajectory data, which is widely used in urban system research. While Large Language Model-based methods excel at generating routine trajectories, they struggle to capture deviated mobility during large-scale societal events. This limitation stems from two critical gaps: (1) the absence of event-annotated mobility datasets for design and evaluation, and (2) the inability of current frameworks to reconcile competitions between users' habitual patterns and event-imposed constraints when making trajectory decisions. This work addresses these gaps with a twofold contribution. First, we construct the first event-annotated mobility dataset covering three major events: Typhoon Hagibis, COVID-19, and the Tokyo 2021 Olympics. Second, we propose ELLMob, a self-aligned LLM framework that first extracts competing rationales between habitual patterns and event constraints, based on Fuzzy-Trace Theory, and then iteratively aligns them to generate trajectories that are both habitually grounded and event-responsive. Extensive experiments show that ELLMob wins state-of-the-art baselines across all events, demonstrating its effectiveness. Our codes and datasets are available at https://github.com/deepkashiwa20/ELLMob.
TrajGPT-R: Generating Urban Mobility Trajectory with Reinforcement Learning-Enhanced Generative Pre-trained Transformer
Feb 24, 2026Mobility trajectories are essential for understanding urban dynamics and enhancing urban planning, yet access to such data is frequently hindered by privacy concerns. This research introduces a transformative framework for generating large-scale urban mobility trajectories, employing a novel application of a transformer-based model pre-trained and fine-tuned through a two-phase process. Initially, trajectory generation is conceptualized as an offline reinforcement learning (RL) problem, with a significant reduction in vocabulary space achieved during tokenization. The integration of Inverse Reinforcement Learning (IRL) allows for the capture of trajectory-wise reward signals, leveraging historical data to infer individual mobility preferences. Subsequently, the pre-trained model is fine-tuned using the constructed reward model, effectively addressing the challenges inherent in traditional RL-based autoregressive methods, such as long-term credit assignment and handling of sparse reward environments. Comprehensive evaluations on multiple datasets illustrate that our framework markedly surpasses existing models in terms of reliability and diversity. Our findings not only advance the field of urban mobility modeling but also provide a robust methodology for simulating urban data, with significant implications for traffic management and urban development planning. The implementation is publicly available at https://github.com/Wangjw6/TrajGPT_R.
Text-Pass Filter: An Efficient Scene Text Detector
Jan 26, 2026To pursue an efficient text assembling process, existing methods detect texts via the shrink-mask expansion strategy. However, the shrinking operation loses the visual features of text margins and confuses the foreground and background difference, which brings intrinsic limitations to recognize text features. We follow this issue and design Text-Pass Filter (TPF) for arbitrary-shaped text detection. It segments the whole text directly, which avoids the intrinsic limitations. It is noteworthy that different from previous whole text region-based methods, TPF can separate adhesive texts naturally without complex decoding or post-processing processes, which makes it possible for real-time text detection. Concretely, we find that the band-pass filter allows through components in a specified band of frequencies, called its passband but blocks components with frequencies above or below this band. It provides a natural idea for extracting whole texts separately. By simulating the band-pass filter, TPF constructs a unique feature-filter pair for each text. In the inference stage, every filter extracts the corresponding matched text by passing its pass-feature and blocking other features. Meanwhile, considering the large aspect ratio problem of ribbon-like texts makes it hard to recognize texts wholly, a Reinforcement Ensemble Unit (REU) is designed to enhance the feature consistency of the same text and to enlarge the filter's recognition field to help recognize whole texts. Furthermore, a Foreground Prior Unit (FPU) is introduced to encourage TPF to discriminate the difference between the foreground and background, which improves the feature-filter pair quality. Experiments demonstrate the effectiveness of REU and FPU while showing the TPF's superiority.
HA2F: Dual-module Collaboration-Guided Hierarchical Adaptive Aggregation Framework for Remote Sensing Change Detection
Jan 23, 2026Remote sensing change detection (RSCD) aims to identify the spatio-temporal changes of land cover, providing critical support for multi-disciplinary applications (e.g., environmental monitoring, disaster assessment, and climate change studies). Existing methods focus either on extracting features from localized patches, or pursue processing entire images holistically, which leads to the cross temporal feature matching deviation and exhibiting sensitivity to radiometric and geometric noise. Following the above issues, we propose a dual-module collaboration guided hierarchical adaptive aggregation framework, namely HA2F, which consists of dynamic hierarchical feature calibration module (DHFCM) and noise-adaptive feature refinement module (NAFRM). The former dynamically fuses adjacent-level features through perceptual feature selection, suppressing irrelevant discrepancies to address multi-temporal feature alignment deviations. The NAFRM utilizes the dual feature selection mechanism to highlight the change sensitive regions and generate spatial masks, suppressing the interference of irrelevant regions or shadows. Extensive experiments verify the effectiveness of the proposed HA2F, which achieves state-of-the-art performance on LEVIR-CD, WHU-CD, and SYSU-CD datasets, surpassing existing comparative methods in terms of both precision metrics and computational efficiency. In addition, ablation experiments show that DHFCM and NAFRM are effective. \href{https://huggingface.co/InPeerReview/RemoteSensingChangeDetection-RSCD.HA2F}{HA2F Official Code is Available Here!}
DCCS-Det: Directional Context and Cross-Scale-Aware Detector for Infrared Small Target
Jan 23, 2026Infrared small target detection (IRSTD) is critical for applications like remote sensing and surveillance, which aims to identify small, low-contrast targets against complex backgrounds. However, existing methods often struggle with inadequate joint modeling of local-global features (harming target-background discrimination) or feature redundancy and semantic dilution (degrading target representation quality). To tackle these issues, we propose DCCS-Det (Directional Context and Cross-Scale Aware Detector for Infrared Small Target), a novel detector that incorporates a Dual-stream Saliency Enhancement (DSE) block and a Latent-aware Semantic Extraction and Aggregation (LaSEA) module. The DSE block integrates localized perception with direction-aware context aggregation to help capture long-range spatial dependencies and local details. On this basis, the LaSEA module mitigates feature degradation via cross-scale feature extraction and random pooling sampling strategies, enhancing discriminative features and suppressing noise. Extensive experiments show that DCCS-Det achieves state-of-the-art detection accuracy with competitive efficiency across multiple datasets. Ablation studies further validate the contributions of DSE and LaSEA in improving target perception and feature representation under complex scenarios. \href{https://huggingface.co/InPeerReview/InfraredSmallTargetDetection-IRSTD.DCCS}{DCCS-Det Official Code is Available Here!}
MDAFNet: Multiscale Differential Edge and Adaptive Frequency Guided Network for Infrared Small Target Detection
Jan 23, 2026Infrared small target detection (IRSTD) plays a crucial role in numerous military and civilian applications. However, existing methods often face the gradual degradation of target edge pixels as the number of network layers increases, and traditional convolution struggles to differentiate between frequency components during feature extraction, leading to low-frequency backgrounds interfering with high-frequency targets and high-frequency noise triggering false detections. To address these limitations, we propose MDAFNet (Multi-scale Differential Edge and Adaptive Frequency Guided Network for Infrared Small Target Detection), which integrates the Multi-Scale Differential Edge (MSDE) module and Dual-Domain Adaptive Feature Enhancement (DAFE) module. The MSDE module, through a multi-scale edge extraction and enhancement mechanism, effectively compensates for the cumulative loss of target edge information during downsampling. The DAFE module combines frequency domain processing mechanisms with simulated frequency decomposition and fusion mechanisms in the spatial domain to effectively improve the network's capability to adaptively enhance high-frequency targets and selectively suppress high-frequency noise. Experimental results on multiple datasets demonstrate the superior detection performance of MDAFNet.
Road Similarity-Based BEV-Satellite Image Matching for UGV Localization
Apr 23, 2025To address the challenge of autonomous UGV localization in GNSS-denied off-road environments,this study proposes a matching-based localization method that leverages BEV perception image and satellite map within a road similarity space to achieve high-precision positioning.We first implement a robust LiDAR-inertial odometry system, followed by the fusion of LiDAR and image data to generate a local BEV perception image of the UGV. This approach mitigates the significant viewpoint discrepancy between ground-view images and satellite map. The BEV image and satellite map are then projected into the road similarity space, where normalized cross correlation (NCC) is computed to assess the matching score.Finally, a particle filter is employed to estimate the probability distribution of the vehicle's pose.By comparing with GNSS ground truth, our localization system demonstrated stability without divergence over a long-distance test of 10 km, achieving an average lateral error of only 0.89 meters and an average planar Euclidean error of 3.41 meters. Furthermore, it maintained accurate and stable global localization even under nighttime conditions, further validating its robustness and adaptability.
Edge Approximation Text Detector
Apr 05, 2025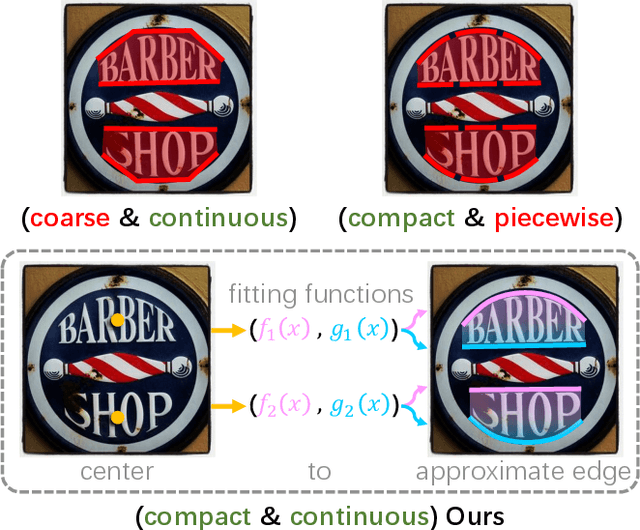



Pursuing efficient text shape representations helps scene text detection models focus on compact foreground regions and optimize the contour reconstruction steps to simplify the whole detection pipeline. Current approaches either represent irregular shapes via box-to-polygon strategy or decomposing a contour into pieces for fitting gradually, the deficiency of coarse contours or complex pipelines always exists in these models. Considering the above issues, we introduce EdgeText to fit text contours compactly while alleviating excessive contour rebuilding processes. Concretely, it is observed that the two long edges of texts can be regarded as smooth curves. It allows us to build contours via continuous and smooth edges that cover text regions tightly instead of fitting piecewise, which helps avoid the two limitations in current models. Inspired by this observation, EdgeText formulates the text representation as the edge approximation problem via parameterized curve fitting functions. In the inference stage, our model starts with locating text centers, and then creating curve functions for approximating text edges relying on the points. Meanwhile, truncation points are determined based on the location features. In the end, extracting curve segments from curve functions by using the pixel coordinate information brought by truncation points to reconstruct text contours. Furthermore, considering the deep dependency of EdgeText on text edges, a bilateral enhanced perception (BEP) module is designed. It encourages our model to pay attention to the recognition of edge features. Additionally, to accelerate the learning of the curve function parameters, we introduce a proportional integral loss (PI-loss) to force the proposed model to focus on the curve distribution and avoid being disturbed by text scales.
ANNEXE: Unified Analyzing, Answering, and Pixel Grounding for Egocentric Interaction
Apr 02, 2025



Egocentric interaction perception is one of the essential branches in investigating human-environment interaction, which lays the basis for developing next-generation intelligent systems. However, existing egocentric interaction understanding methods cannot yield coherent textual and pixel-level responses simultaneously according to user queries, which lacks flexibility for varying downstream application requirements. To comprehend egocentric interactions exhaustively, this paper presents a novel task named Egocentric Interaction Reasoning and pixel Grounding (Ego-IRG). Taking an egocentric image with the query as input, Ego-IRG is the first task that aims to resolve the interactions through three crucial steps: analyzing, answering, and pixel grounding, which results in fluent textual and fine-grained pixel-level responses. Another challenge is that existing datasets cannot meet the conditions for the Ego-IRG task. To address this limitation, this paper creates the Ego-IRGBench dataset based on extensive manual efforts, which includes over 20k egocentric images with 1.6 million queries and corresponding multimodal responses about interactions. Moreover, we design a unified ANNEXE model to generate text- and pixel-level outputs utilizing multimodal large language models, which enables a comprehensive interpretation of egocentric interactions. The experiments on the Ego-IRGBench exhibit the effectiveness of our ANNEXE model compared with other works.