 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-RHO: Critical-path-aware Heterogeneous Graph Network for Long-Horizon Flexible Job-Shop Scheduling
Apr 11, 2026Long-horizon Flexible Job-Shop Scheduling~(FJSP) presents a formidable combinatorial challenge due to complex, interdependent decisions spanning extended time horizons. While learning-based Rolling Horizon Optimization~(RHO) has emerged as a promising paradigm to accelerate solving by identifying and fixing invariant operations, its effectiveness is hindered by the structural complexity of FJSP. Existing methods often fail to capture intricate graph-structured dependencies and ignore the asymmetric costs of prediction errors, in which misclassifying critical-path operations is significantly more detrimental than misclassifying non-critical ones. Furthermore, dynamic shifts in predictive confidence during the rolling process make static pruning thresholds inadequate. To address these limitations, we propose Graph-RHO, a novel critical-path-aware graph-based RHO framework. First, we introduce a topology-aware heterogeneous graph network that encodes subproblems as operation-machine graphs with multi-relational edges, leveraging edge-feature-aware message passing to predict operation stability. Second, we incorporate a critical-path-aware mechanism that injects inductive biases during training to distinguish highly sensitive bottleneck operations from robust ones. Third, we devise an adaptive thresholding strategy that dynamically calibrates decision boundaries based on online uncertainty estimation to align model predictions with the solver's search space. Extensive experiments on standard benchmarks demonstrate that \mbox{Graph-RHO} establishes a new state of the art in solution quality and computational efficiency. Remarkably, it exhibits exceptional zero-shot generalization, reducing solve time by over 30\% on large-scale instances (2000 operations) while achieving superior solution quality. Our code is available \href{https://github.com/IntelliSensing/Graph-RHO}{here}.
Efficient Off-Grid Near-Field Cascade Channel Estimation for XL-IRS Systems via Tucker Decomposition
Feb 15, 2026Accurate cascaded channel state information is pivotal for extremely large-scale intelligent reflecting surfaces (XL-IRS) in next-generation wireless networks. However, the large XL-IRS aperture induces spherical wavefront propagation due to near-field (NF) effects, complicating cascaded channel estimation. Conventional dictionary-based methods suffer from cumulative quantization errors and high complexity, especially in uniform planar array (UPA) systems. To address these issues, we first propose a tensor modelization method for NF cascaded channels by exploiting the tensor product among the horizontal and vertical response vectors of the UPA-structured base station (BS) and the incident-reflective array response vector of the IRS. This structure leverages spatial characteristics, enabling independent estimation of factor matrices to improve efficiency. Meanwhile, to avoid quantization errors, we propose an off-grid cascaded channel estimation framework based on sparse Tucker decomposition. Specifically, we model the received signal as a Tucker tensor, where the sparse core tensor captures path gain-delay terms and three factor matrices are spanned by BS and NF IRS array responses. We then formulate a sparse core tensor minimization problem with tri-modal log-sum sparsity constraints to tackle the NP-hard challenge. Finally, the method is accelerated via higher-order singular value decomposition preprocessing, combined with majorization-minimization and a tailored tensor over-relaxation fast iterative shrinkage-thresholding technique. We derive the Cramér-Rao lower bound and conduct convergence analysis. Simulations show the proposed scheme achieves a 13.6 dB improvement in normalized mean square error over benchmarks with significantly reduced runtime.
ARIS-RSMA Enhanced ISAC System: Joint Rate Splitting and Beamforming Design
Feb 06, 2026This letter proposes an active reconfigurable intelligent surface (ARIS) assisted rate-splitting multiple access (RSMA) integrated sensing and communication (ISAC) system to overcome the fairness bottleneck in multi-target sensing under obstructed line-of-sight environments. Beamforming at the transceiver and ARIS, along with rate splitting, are optimized to maximize the minimum multi-target echo signal-to-interference-plus-noise ratio under multi-user rate and power constraints. The intricate non-convex problem is decoupled into three subproblems and solved iteratively by majorization-minimization (MM) and sequential rank-one constraint relaxation (SROCR) algorithms. Simulations show our scheme outperforms nonorthogonal multiple access, space-division multiple access, and passive RIS baselines, approaching sensing-only upper bounds.
Accurate Network Traffic Matrix Prediction via LEAD: an LLM-Enhanced Adapter-Based Conditional Diffusion Model
Jan 29, 2026Driven by the evolution toward 6G and AI-native edge intelligence, network operations increasingly require predictive and risk-aware adaptation under stringent computation and latency constraints. Network Traffic Matrix (TM), which characterizes flow volumes between nodes, is a fundamental signal for proactive traffic engineering. However, accurate TM forecasting remains challenging due to the stochastic, non-linear, and bursty nature of network dynamics. Existing discriminative models often suffer from over-smoothing and provide limited uncertainty awareness, leading to poor fidelity under extreme bursts. To address these limitations, we propose LEAD, a Large Language Model (LLM)-Enhanced Adapter-based conditional Diffusion model. First, LEAD adopts a "Traffic-to-Image" paradigm to transform traffic matrices into RGB images, enabling global dependency modeling via vision backbones. Then, we design a "Frozen LLM with Trainable Adapter" model, which efficiently captures temporal semantics with limited computational cost. Moreover, we propose a Dual-Conditioning Strategy to precisely guide a diffusion model to generate complex, dynamic network traffic matrices. Experiments on the Abilene and GEANT datasets demonstrate that LEAD outperforms all baselines. On the Abilene dataset, LEAD attains a remarkable 45.2% reduction in RMSE against the best baseline, with the error margin rising only marginally from 0.1098 at one-step to 0.1134 at 20-step predictions. Meanwhile, on the GEANT dataset, LEAD achieves a 0.0258 RMSE at 20-step prediction horizon which is 27.3% lower than the best baseline.
Joint Communication and Radar Sensing for Terahertz Space-Air-Ground Integrated Networks (SAGIN)
Feb 25, 2025The transition from isolated systems to integrated solutions has driven the development of space-air-ground integrated networks (SAGIN) as well as the integration of communication and radar sensing functionalities. By leveraging the unique properties of the Terahertz (THz) band, THz joint communication and radar sensing (JCRS) supports high-speed communication and precise sensing, addressing the growing demands of SAGIN for connectivity and environmental awareness. However, most existing THz studies focus on terrestrial and static scenarios, with limited consideration for the dynamic and non-terrestrial environments of SAGIN. In this paper, the THz JCRS techniques for SAGIN are comprehensively investigated. Specifically, propagation characteristics and channel models of THz waves in non-terrestrial environments are analyzed. A link capacity comparison with millimeter-wave, THz, and free-space optical frequency bands is conducted to highlight the advantages of THz frequencies. Moreover, novel JCRS waveform design strategies are presented to achieve mutual merit of communication and radar sensing, while networking strategies are developed to overcome challenges in SAGIN such as high mobility. Furthermore, advancements in THz device technologies, including antennas and amplifiers, are reviewed to assess their roles in enabling practical JCRS implementations.
UniRS: Unifying Multi-temporal Remote Sensing Tasks through Vision Language Models
Dec 30, 2024



The domain gap between remote sensing imagery and natural images has recently received widespread attention and Vision-Language Models (VLMs) have demonstrated excellent generalization performance in remote sensing multimodal tasks. However, current research is still limited in exploring how remote sensing VLMs handle different types of visual inputs. To bridge this gap, we introduce \textbf{UniRS}, the first vision-language model \textbf{uni}fying multi-temporal \textbf{r}emote \textbf{s}ensing tasks across various types of visual input. UniRS supports single images, dual-time image pairs, and videos as input, enabling comprehensive remote sensing temporal analysis within a unified framework. We adopt a unified visual representation approach, enabling the model to accept various visual inputs. For dual-time image pair tasks, we customize a change extraction module to further enhance the extraction of spatiotemporal features. Additionally, we design a prompt augmentation mechanism tailored to the model's reasoning process, utilizing the prior knowledge of the general-purpose VLM to provide clues for UniRS. To promote multi-task knowledge sharing, the model is jointly fine-tuned on a mixed dataset. Experimental results show that UniRS achieves state-of-the-art performance across diverse tasks, including visual question answering, change captioning, and video scene classification, highlighting its versatility and effectiveness in unifying these multi-temporal remote sensing tasks. Our code and dataset will be released soon.
Sensing-Assisted Beam Tracking with Real-Time Beamwidth Adaptation for THz Communications
Nov 13, 2024Terahertz (THz) communications, with their substantial bandwidth, are essential for meeting the ultra-high data rate demands of emerging high-mobility scenarios such as vehicular-to-everything (V2X) networks. In these contexts, beamwidth adaptation has been explored to address the problem that high-mobility targets frequently move out of the narrow THz beam range. However, existing approaches cannot effectively track targets due to a lack of real-time motion awareness. Consequently, we propose a sensing-assisted beam tracking scheme with real-time beamwidth adaptation. Specifically, the base station (BS) periodically collects prior sensing information to predict the target's motion path by applying a particular motion model. Then, we build a pre-calculated codebook by optimising precoders to align the beamwidth with various predicted target paths, thereby maximising the average achievable data rates within each sensing period. Finally, the BS selects the optimal precoder from the codebook to maintain stable and continuous connectivity. Simulation results show that the proposed scheme significantly improves the rate performance and reduces outage probability compared to existing approaches under various target mobility.
Joint Beamforming Design and Satellite Selection for Integrated Communication and Navigation in LEO Satellite Networks
Oct 25, 2024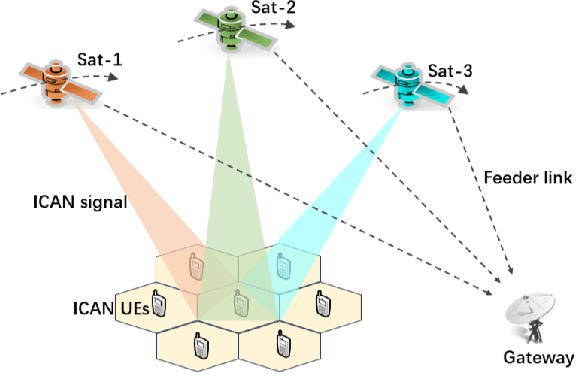

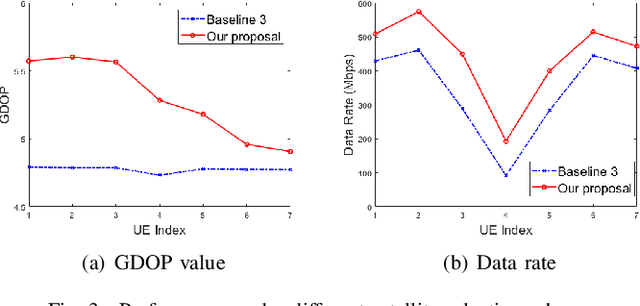
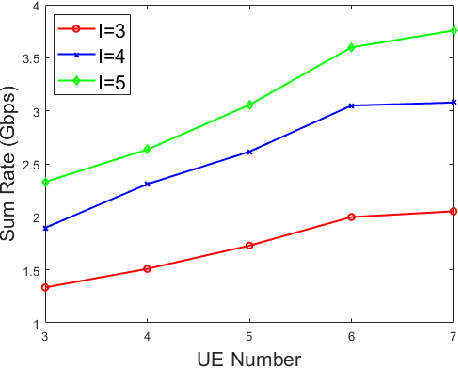
Relying on the powerful communication capabilities and rapidly changing geometric configuration, the Low Earth Orbit (LEO) satellites have the potential to offer integrated communication and navigation (ICAN) services. However, the isolated resource utilization in the traditional satellite communication and navigation systems has led to a compromised system performance. Against this backdrop, this paper formulates a joint beamforming design and satellite selection optimization problem for the LEO-ICAN network to maximize the sum rate, while simultaneously reconciling the positioning performance. A two-layer algorithm is proposed, where the beamforming design in the inner layer is solved by the difference-of-convex programming method to maximize the sum rate, and the satellite selection in the outer layer is modeled as a coalition formation game to simultaneously reconcile the positioning performance. Simulation results verify the superiority of our proposed algorithms by increasing the sum rate by 16.6% and 29.3% compared with the conventional beamforming and satellite selection schemes, respectively.
Detection and Multi-Parameter Estimation for NLOS Targets: An IRS-assisted Framework
Jul 04, 2024Intelligent reflecting surface (IRS) has the potential to enhance sensing performance, due to its capability of reshaping the echo signals. Different from the existing literature, which has commonly focused on IRS beamforming optimization, in this paper, we pay special attention to designing effective signal processing approaches to extract sensing information from IRS-reshaped echo signals. To this end, we investigate an IRS-assisted non-line-of-sight (NLOS) target detection and multi-parameter estimation problem in orthogonal frequency division multiplexing (OFDM) systems. To address this problem, we first propose a novel detection and direction estimation framework, including a low-overhead hierarchical codebook that allows the IRS to generate three-dimensional beams with adjustable beam direction and width, a delay spectrum peak-based beam training scheme for detection and direction estimation, and a beam refinement scheme for further enhancing the accuracy of the direction estimation. Then, we propose a target range and velocity estimation scheme by extracting the delay-Doppler information from the IRS-reshaped echo signals. Numerical results demonstrate that the proposed schemes can achieve 99.7% target detection rate, a 10^{-3}-rad level direction estimation accuracy, and a 10^{-6}-m/10^{-5}-m/s level range/velocity estimation accuracy.
Rethinking the fundamental performance limits of integrated sensing and communication systems
Jul 04, 2024Integrated sensing and communication (ISAC) has been recognized as a key enabler and feature of future wireless networks. In the existing works analyzing the performances of ISAC, discrete-time systems were commonly assumed, which, however, overlooked the impacts of temporal, spectral, and spatial properties. To address this issue, we establish a unified information model for the band-limited continuous-time ISAC systems. In the established information model, we employ a novel sensing performance metric, called the sensing mutual information (SMI). Through analysis, we show how the SMI can be utilized as a bridge between the mutual information domain and the mean squared error (MSE) domain. In addition, we illustrate the communication mutual information (CMI)-SMI and CMI-MSE regions to identify the performance bounds of ISAC systems in practical settings and reveal the trade-off between communication and sensing performances. Moreover, via analysis and numerical results, we provide two valuable insights into the design of novel ISAC-enabled systems: i) communication prefers the waveforms of random amplitude, sensing prefers the waveforms of constant amplitude, both communication and sensing favor the waveforms of low correlations with random phases; ii) There exists a linear positive proportional relationship between the allocated time-frequency resource and the achieved communication rate/sensing MSE.