 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTimeClaw: A Time-Series AI Agent with Exploratory Execution Learning
May 11, 2026Time series analysis underpins forecasting, monitoring, and decision making in domains such as finance and weather, where solving a task often requires both numerical accuracy and contextual reasoning. Recent progress has moved from specialized neural predictors to approaches built on LLMs and foundation models that can reason over time series inputs and use external tools. However, most such systems remain execution-centric: they focus on solving the current instance but learn little from exploratory execution. This is especially limiting in verifiable numeric settings, where multiple candidate executions and tool-use procedures may all be task-valid yet differ sharply in quantitative quality, and where early success can trigger tool-prior collapse that suppresses further exploration. To address this limitation, we present TimeClaw, an exploratory execution learning framework that turns exploratory execution into reusable hierarchical distilled experience through a four-stage loop: Explore, Compare, Distill, and Reinject. TimeClaw combines metric-supervised exploratory execution learning, task-aware tool dropout, and hierarchical distilled experience for inference-time reinjection, while keeping the base model frozen and avoiding online test-time adaptation. In an MTBench-aligned evaluation with 17 tasks that span finance and weather prediction and reasoning tasks, TimeClaw delivers consistent gains over the baselines. These results suggest that, for scientific systems, the bottleneck is not only execution-time capability, but how exploratory experience is compared, distilled, and reused.
TrajFlow: Nation-wide Pseudo GPS Trajectory Generation with Flow Matching Models
Mar 16, 2026The importance of mobile phone GPS trajectory data is widely recognized across many fields, yet the use of real data is often hindered by privacy concerns, limited accessibility, and high acquisition costs. As a result, generating pseudo-GPS trajectory data has become an active area of research. Recent diffusion-based approaches have achieved strong fidelity but remain limited in spatial scale (small urban areas), transportation-mode diversity, and efficiency (requiring numerous sampling steps). To address these challenges, we introduce TrajFlow, which to the best of our knowledge is the first flow-matching-based generative model for GPS trajectory generation. TrajFlow leverages the flow-matching paradigm to improve robustness and efficiency across multiple geospatial scales, and incorporates a trajectory harmonization and reconstruction strategy to jointly address scalability, diversity, and efficiency. Using a nationwide mobile phone GPS dataset with millions of trajectories across Japan, we show that TrajFlow or its variants consistently outperform diffusion-based and deep generative baselines at urban, metropolitan, and nationwide levels. As the first nationwide, multi-scale GPS trajectory generation model, TrajFlow demonstrates strong potential to support inter-region urban planning, traffic management, and disaster response, thereby advancing the resilience and intelligence of future mobility systems.
Routing Channel-Patch Dependencies in Time Series Forecasting with Graph Spectral Decomposition
Mar 14, 2026Time series forecasting has attracted significant attention in the field of AI. Previous works have revealed that the Channel-Independent (CI) strategy improves forecasting performance by modeling each channel individually, but it often suffers from poor generalization and overlooks meaningful inter-channel interactions. Conversely, Channel-Dependent (CD) strategies aggregate all channels, which may introduce irrelevant information and lead to oversmoothing. Despite recent progress, few existing methods offer the flexibility to adaptively balance CI and CD strategies in response to varying channel dependencies. To address this, we propose a generic plugin xCPD, that can adaptively model the channel-patch dependencies from the perspective of graph spectral decomposition. Specifically, xCPD first projects multivariate signals into the frequency domain using a shared graph Fourier basis, and groups patches into low-, mid-, and high-frequency bands based on their spectral energy responses. xCPD then applies a channel-adaptive routing mechanism that dynamically adjusts the degree of inter-channel interaction for each patch, enabling selective activation of frequency-specific experts. This facilitates fine-grained input-aware modeling of smooth trends, local fluctuations, and abrupt transitions. xCPD can be seamlessly integrated on top of existing CI and CD forecasting models, consistently enhancing both accuracy and generalization across benchmarks. The code is available https://github.com/Clearloveyuan/xCPD.
Node Role-Guided LLMs for Dynamic Graph Clustering
Mar 14, 2026Dynamic graph clustering aims to detect and track time-varying clusters in dynamic graphs, revealing how complex real-world systems evolve over time. However, existing methods are predominantly black-box models. They lack interpretability in their clustering decisions and fail to provide semantic explanations of why clusters form or how they evolve, severely limiting their use in safety-critical domains such as healthcare or transportation. To address these limitations, we propose an end-to-end interpretable framework that maps continuous graph embeddings into discrete semantic concepts through learnable prototypes. Specifically, we first decompose node representations into orthogonal role and clustering subspaces, so that nodes with similar roles (e.g., hubs, bridges) but different cluster affiliations can be properly distinguished. We then introduce five node role prototypes (Leader, Contributor, Wanderer, Connector, Newcomer) in the role subspace as semantic anchors, transforming continuous embeddings into discrete concepts to facilitate LLM understanding of node roles within communities. Finally, we design a hierarchical LLM reasoning mechanism to generate both clustering results and natural language explanations, while providing consistency feedback as weak supervision to refine node representations. Experimental results on four synthetic and six real-world benchmarks demonstrate the effectiveness, interpretability, and robustness of DyG-RoLLM. Code is available at https://github.com/Clearloveyuan/DyG-RoLLM.
ELLMob: Event-Driven Human Mobility Generation with Self-Aligned LLM Framework
Mar 09, 2026Human mobility generation aims to synthesize plausible trajectory data, which is widely used in urban system research. While Large Language Model-based methods excel at generating routine trajectories, they struggle to capture deviated mobility during large-scale societal events. This limitation stems from two critical gaps: (1) the absence of event-annotated mobility datasets for design and evaluation, and (2) the inability of current frameworks to reconcile competitions between users' habitual patterns and event-imposed constraints when making trajectory decisions. This work addresses these gaps with a twofold contribution. First, we construct the first event-annotated mobility dataset covering three major events: Typhoon Hagibis, COVID-19, and the Tokyo 2021 Olympics. Second, we propose ELLMob, a self-aligned LLM framework that first extracts competing rationales between habitual patterns and event constraints, based on Fuzzy-Trace Theory, and then iteratively aligns them to generate trajectories that are both habitually grounded and event-responsive. Extensive experiments show that ELLMob wins state-of-the-art baselines across all events, demonstrating its effectiveness. Our codes and datasets are available at https://github.com/deepkashiwa20/ELLMob.
TrajGPT-R: Generating Urban Mobility Trajectory with Reinforcement Learning-Enhanced Generative Pre-trained Transformer
Feb 24, 2026Mobility trajectories are essential for understanding urban dynamics and enhancing urban planning, yet access to such data is frequently hindered by privacy concerns. This research introduces a transformative framework for generating large-scale urban mobility trajectories, employing a novel application of a transformer-based model pre-trained and fine-tuned through a two-phase process. Initially, trajectory generation is conceptualized as an offline reinforcement learning (RL) problem, with a significant reduction in vocabulary space achieved during tokenization. The integration of Inverse Reinforcement Learning (IRL) allows for the capture of trajectory-wise reward signals, leveraging historical data to infer individual mobility preferences. Subsequently, the pre-trained model is fine-tuned using the constructed reward model, effectively addressing the challenges inherent in traditional RL-based autoregressive methods, such as long-term credit assignment and handling of sparse reward environments. Comprehensive evaluations on multiple datasets illustrate that our framework markedly surpasses existing models in terms of reliability and diversity. Our findings not only advance the field of urban mobility modeling but also provide a robust methodology for simulating urban data, with significant implications for traffic management and urban development planning. The implementation is publicly available at https://github.com/Wangjw6/TrajGPT_R.
See2Refine: Vision-Language Feedback Improves LLM-Based eHMI Action Designers
Feb 02, 2026Automated vehicles lack natural communication channels with other road users, making external Human-Machine Interfaces (eHMIs) essential for conveying intent and maintaining trust in shared environments. However, most eHMI studies rely on developer-crafted message-action pairs, which are difficult to adapt to diverse and dynamic traffic contexts. A promising alternative is to use Large Language Models (LLMs) as action designers that generate context-conditioned eHMI actions, yet such designers lack perceptual verification and typically depend on fixed prompts or costly human-annotated feedback for improvement. We present See2Refine, a human-free, closed-loop framework that uses vision-language model (VLM) perceptual evaluation as automated visual feedback to improve an LLM-based eHMI action designer. Given a driving context and a candidate eHMI action, the VLM evaluates the perceived appropriateness of the action, and this feedback is used to iteratively revise the designer's outputs, enabling systematic refinement without human supervision. We evaluate our framework across three eHMI modalities (lightbar, eyes, and arm) and multiple LLM model sizes. Across settings, our framework consistently outperforms prompt-only LLM designers and manually specified baselines in both VLM-based metrics and human-subject evaluations. Results further indicate that the improvements generalize across modalities and that VLM evaluations are well aligned with human preferences, supporting the robustness and effectiveness of See2Refine for scalable action design.
Towards Resilient Transportation: A Conditional Transformer for Accident-Informed Traffic Forecasting
Dec 10, 2025Traffic prediction remains a key challenge in spatio-temporal data mining, despite progress in deep learning. Accurate forecasting is hindered by the complex influence of external factors such as traffic accidents and regulations, often overlooked by existing models due to limited data integration. To address these limitations, we present two enriched traffic datasets from Tokyo and California, incorporating traffic accident and regulation data. Leveraging these datasets, we propose ConFormer (Conditional Transformer), a novel framework that integrates graph propagation with guided normalization layer. This design dynamically adjusts spatial and temporal node relationships based on historical patterns, enhancing predictive accuracy. Our model surpasses the state-of-the-art STAEFormer in both predictive performance and efficiency, achieving lower computational costs and reduced parameter demands. Extensive evaluations demonstrate that ConFormer consistently outperforms mainstream spatio-temporal baselines across multiple metrics, underscoring its potential to advance traffic prediction research.
How Different from the Past? Spatio-Temporal Time Series Forecasting with Self-Supervised Deviation Learning
Oct 06, 2025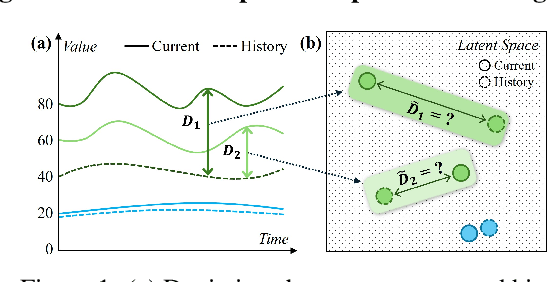
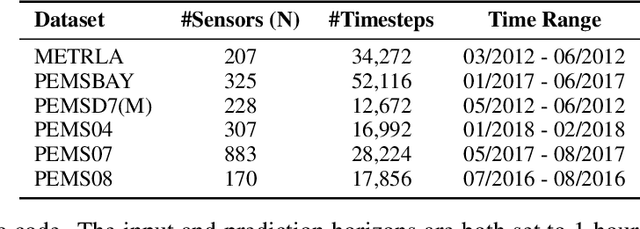
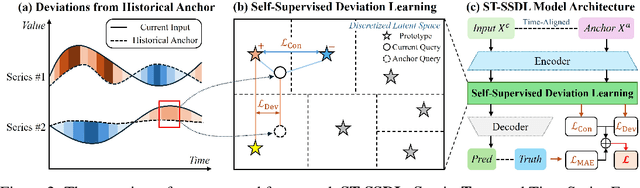
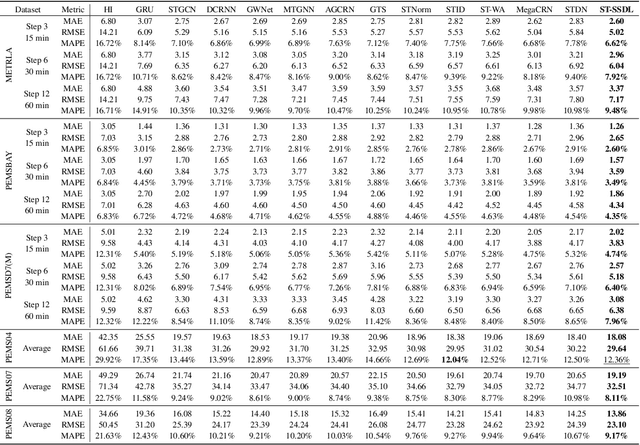
Spatio-temporal forecasting is essential for real-world applications such as traffic management and urban computing. Although recent methods have shown improved accuracy, they often fail to account for dynamic deviations between current inputs and historical patterns. These deviations contain critical signals that can significantly affect model performance. To fill this gap, we propose ST-SSDL, a Spatio-Temporal time series forecasting framework that incorporates a Self-Supervised Deviation Learning scheme to capture and utilize such deviations. ST-SSDL anchors each input to its historical average and discretizes the latent space using learnable prototypes that represent typical spatio-temporal patterns. Two auxiliary objectives are proposed to refine this structure: a contrastive loss that enhances inter-prototype discriminability and a deviation loss that regularizes the distance consistency between input representations and corresponding prototypes to quantify deviation. Optimized jointly with the forecasting objective, these components guide the model to organize its hidden space and improve generalization across diverse input conditions. Experiments on six benchmark datasets show that ST-SSDL consistently outperforms state-of-the-art baselines across multiple metrics. Visualizations further demonstrate its ability to adaptively respond to varying levels of deviation in complex spatio-temporal scenarios. Our code and datasets are available at https://github.com/Jimmy-7664/ST-SSDL.
A Call for Collaborative Intelligence: Why Human-Agent Systems Should Precede AI Autonomy
Jun 11, 2025Recent improvements in large language models (LLMs) have led many researchers to focus on building fully autonomous AI agents. This position paper questions whether this approach is the right path forward, as these autonomous systems still have problems with reliability, transparency, and understanding the actual requirements of human. We suggest a different approach: LLM-based Human-Agent Systems (LLM-HAS), where AI works with humans rather than replacing them. By keeping human involved to provide guidance, answer questions, and maintain control, these systems can be more trustworthy and adaptable. Looking at examples from healthcare, finance, and software development, we show how human-AI teamwork can handle complex tasks better than AI working alone. We also discuss the challenges of building these collaborative systems and offer practical solutions. This paper argues that progress in AI should not be measured by how independent systems become, but by how well they can work with humans. The most promising future for AI is not in systems that take over human roles, but in those that enhance human capabilities through meaningful partnership.