 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasp Like Humans: Learning Generalizable Multi-Fingered Grasping from Human Proprioceptive Sensorimotor Integration
Sep 10, 2025

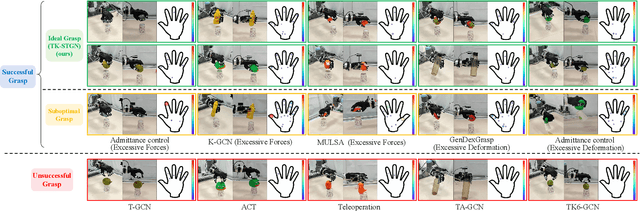

Tactile and kinesthetic perceptions are crucial for human dexterous manipulation, enabling reliable grasping of objects via proprioceptive sensorimotor integration. For robotic hands, even though acquiring such tactile and kinesthetic feedback is feasible, establishing a direct mapping from this sensory feedback to motor actions remains challenging. In this paper, we propose a novel glove-mediated tactile-kinematic perception-prediction framework for grasp skill transfer from human intuitive and natural operation to robotic execution based on imitation learning, and its effectiveness is validated through generalized grasping tasks, including those involving deformable objects. Firstly, we integrate a data glove to capture tactile and kinesthetic data at the joint level. The glove is adaptable for both human and robotic hands, allowing data collection from natural human hand demonstrations across different scenarios. It ensures consistency in the raw data format, enabling evaluation of grasping for both human and robotic hands. Secondly, we establish a unified representation of multi-modal inputs based on graph structures with polar coordinates. We explicitly integrate the morphological differences into the designed representation, enhancing the compatibility across different demonstrators and robotic hands. Furthermore, we introduce the Tactile-Kinesthetic Spatio-Temporal Graph Networks (TK-STGN), which leverage multidimensional subgraph convolutions and attention-based LSTM layers to extract spatio-temporal features from graph inputs to predict node-based states for each hand joint. These predictions are then mapped to final commands through a force-position hybrid mapping.
Fully Spiking Neural Networks for Unified Frame-Event Object Tracking
May 27, 2025The integration of image and event streams offers a promising approach for achieving robust visual object tracking in complex environments. However, current fusion methods achieve high performance at the cost of significant computational overhead and struggle to efficiently extract the sparse, asynchronous information from event streams, failing to leverage the energy-efficient advantages of event-driven spiking paradigms. To address this challenge, we propose the first fully Spiking Frame-Event Tracking framework called SpikeFET. This network achieves synergistic integration of convolutional local feature extraction and Transformer-based global modeling within the spiking paradigm, effectively fusing frame and event data. To overcome the degradation of translation invariance caused by convolutional padding, we introduce a Random Patchwork Module (RPM) that eliminates positional bias through randomized spatial reorganization and learnable type encoding while preserving residual structures. Furthermore, we propose a Spatial-Temporal Regularization (STR) strategy that overcomes similarity metric degradation from asymmetric features by enforcing spatio-temporal consistency among temporal template features in latent space. Extensive experiments across multiple benchmarks demonstrate that the proposed framework achieves superior tracking accuracy over existing methods while significantly reducing power consumption, attaining an optimal balance between performance and efficiency. The code will be released.
A Plug-and-Play Learning-based IMU Bias Factor for Robust Visual-Inertial Odometry
Mar 16, 2025



The bias of low-cost Inertial Measurement Units (IMU) is a critical factor affecting the performance of Visual-Inertial Odometry (VIO). In particular, when visual tracking encounters errors, the optimized bias results may deviate significantly from the true values, adversely impacting the system's stability and localization precision. In this paper, we propose a novel plug-and-play framework featuring the Inertial Prior Network (IPNet), which is designed to accurately estimate IMU bias. Recognizing the substantial impact of initial bias errors in low-cost inertial devices on system performance, our network directly leverages raw IMU data to estimate the mean bias, eliminating the dependency on historical estimates in traditional recursive predictions and effectively preventing error propagation. Furthermore, we introduce an iterative approach to calculate the mean value of the bias for network training, addressing the lack of bias labels in many visual-inertial datasets. The framework is evaluated on two public datasets and one self-collected dataset. Extensive experiments demonstrate that our method significantly enhances both localization precision and robustness, with the ATE-RMSE metric improving on average by 46\%. The source code and video will be available at \textcolor{red}{https://github.com/yiyscut/VIO-IPNet.git}.
Uncertainty-Aware Normal-Guided Gaussian Splatting for Surface Reconstruction from Sparse Image Sequences
Mar 14, 20253D Gaussian Splatting (3DGS) has achieved impressive rendering performance in novel view synthesis. However, its efficacy diminishes considerably in sparse image sequences, where inherent data sparsity amplifies geometric uncertainty during optimization. This often leads to convergence at suboptimal local minima, resulting in noticeable structural artifacts in the reconstructed scenes.To mitigate these issues, we propose Uncertainty-aware Normal-Guided Gaussian Splatting (UNG-GS), a novel framework featuring an explicit Spatial Uncertainty Field (SUF) to quantify geometric uncertainty within the 3DGS pipeline. UNG-GS enables high-fidelity rendering and achieves high-precision reconstruction without relying on priors. Specifically, we first integrate Gaussian-based probabilistic modeling into the training of 3DGS to optimize the SUF, providing the model with adaptive error tolerance. An uncertainty-aware depth rendering strategy is then employed to weight depth contributions based on the SUF, effectively reducing noise while preserving fine details. Furthermore, an uncertainty-guided normal refinement method adjusts the influence of neighboring depth values in normal estimation, promoting robust results. Extensive experiments demonstrate that UNG-GS significantly outperforms state-of-the-art methods in both sparse and dense sequences. The code will be open-source.
Toward Scalable Multirobot Control: Fast Policy Learning in Distributed MPC
Dec 27, 2024



Distributed model predictive control (DMPC) is promising in achieving optimal cooperative control in multirobot systems (MRS). However, real-time DMPC implementation relies on numerical optimization tools to periodically calculate local control sequences online. This process is computationally demanding and lacks scalability for large-scale, nonlinear MRS. This article proposes a novel distributed learning-based predictive control (DLPC) framework for scalable multirobot control. Unlike conventional DMPC methods that calculate open-loop control sequences, our approach centers around a computationally fast and efficient distributed policy learning algorithm that generates explicit closed-loop DMPC policies for MRS without using numerical solvers. The policy learning is executed incrementally and forward in time in each prediction interval through an online distributed actor-critic implementation. The control policies are successively updated in a receding-horizon manner, enabling fast and efficient policy learning with the closed-loop stability guarantee. The learned control policies could be deployed online to MRS with varying robot scales, enhancing scalability and transferability for large-scale MRS. Furthermore, we extend our methodology to address the multirobot safe learning challenge through a force field-inspired policy learning approach. We validate our approach's effectiveness, scalability, and efficiency through extensive experiments on cooperative tasks of large-scale wheeled robots and multirotor drones. Our results demonstrate the rapid learning and deployment of DMPC policies for MRS with scales up to 10,000 units.
Tracking Any Point with Frame-Event Fusion Network at High Frame Rate
Sep 18, 2024



Tracking any point based on image frames is constrained by frame rates, leading to instability in high-speed scenarios and limited generalization in real-world applications. To overcome these limitations, we propose an image-event fusion point tracker, FE-TAP, which combines the contextual information from image frames with the high temporal resolution of events, achieving high frame rate and robust point tracking under various challenging conditions. Specifically, we designed an Evolution Fusion module (EvoFusion) to model the image generation process guided by events. This module can effectively integrate valuable information from both modalities operating at different frequencies. To achieve smoother point trajectories, we employed a transformer-based refinement strategy that updates the point's trajectories and features iteratively. Extensive experiments demonstrate that our method outperforms state-of-the-art approaches, particularly improving expected feature age by 24$\%$ on EDS datasets. Finally, we qualitatively validated the robustness of our algorithm in real driving scenarios using our custom-designed high-resolution image-event synchronization device. Our source code will be released at https://github.com/ljx1002/FE-TAP.
TD-NeRF: Novel Truncated Depth Prior for Joint Camera Pose and Neural Radiance Field Optimization
May 11, 2024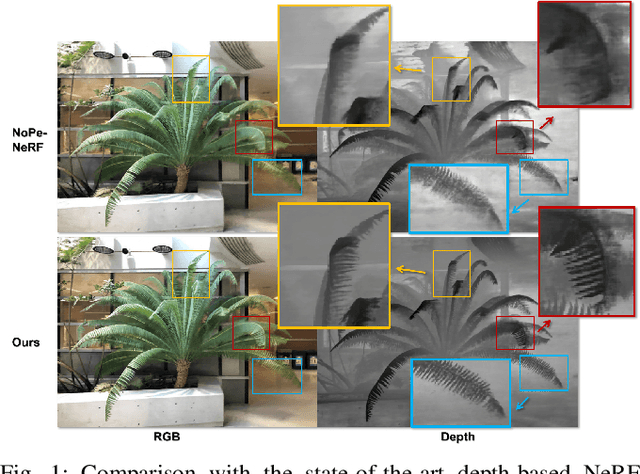
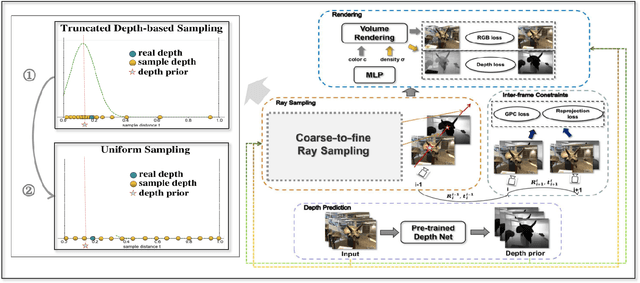
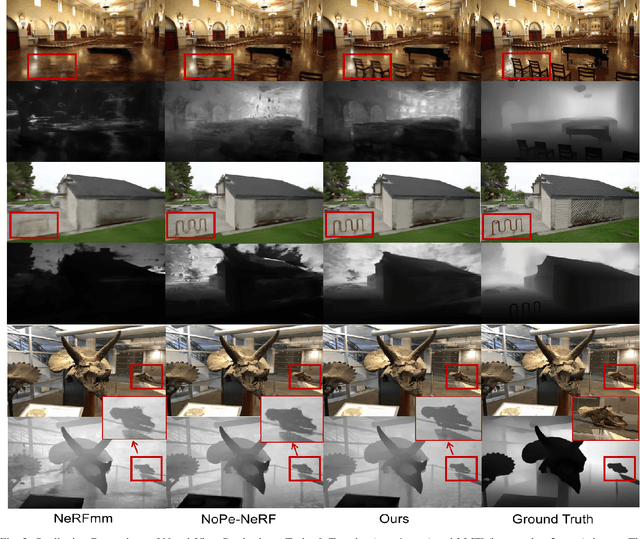
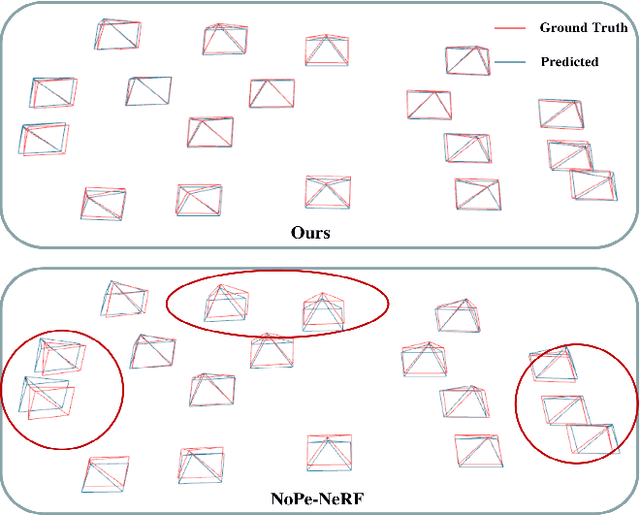
The reliance on accurate camera poses is a significant barrier to the widespread deployment of Neural Radiance Fields (NeRF) models for 3D reconstruction and SLAM tasks. The existing method introduces monocular depth priors to jointly optimize the camera poses and NeRF, which fails to fully exploit the depth priors and neglects the impact of their inherent noise. In this paper, we propose Truncated Depth NeRF (TD-NeRF), a novel approach that enables training NeRF from unknown camera poses - by jointly optimizing learnable parameters of the radiance field and camera poses. Our approach explicitly utilizes monocular depth priors through three key advancements: 1) we propose a novel depth-based ray sampling strategy based on the truncated normal distribution, which improves the convergence speed and accuracy of pose estimation; 2) to circumvent local minima and refine depth geometry, we introduce a coarse-to-fine training strategy that progressively improves the depth precision; 3) we propose a more robust inter-frame point constraint that enhances robustness against depth noise during training. The experimental results on three datasets demonstrate that TD-NeRF achieves superior performance in the joint optimization of camera pose and NeRF, surpassing prior works, and generates more accurate depth geometry. The implementation of our method has been released at https://github.com/nubot-nudt/TD-NeRF.
SceneTracker: Long-term Scene Flow Estimation Network
Mar 29, 2024

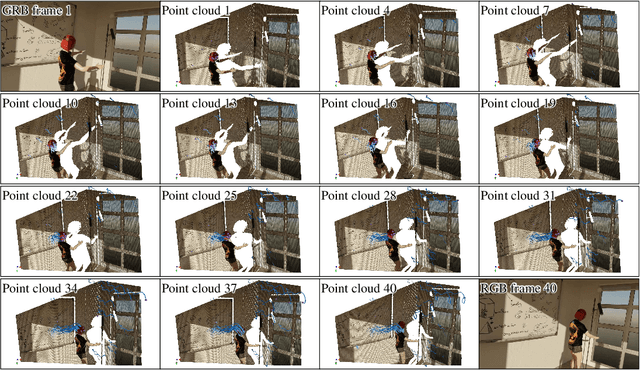

Considering the complementarity of scene flow estimation in the spatial domain's focusing capability and 3D object tracking in the temporal domain's coherence, this study aims to address a comprehensive new task that can simultaneously capture fine-grained and long-term 3D motion in an online manner: long-term scene flow estimation (LSFE). We introduce SceneTracker, a novel learning-based LSFE network that adopts an iterative approach to approximate the optimal trajectory. Besides, it dynamically indexes and constructs appearance and depth correlation features simultaneously and employs the Transformer to explore and utilize long-range connections within and between trajectories. With detailed experiments, SceneTracker shows superior capabilities in handling 3D spatial occlusion and depth noise interference, highly tailored to the LSFE task's needs. The code for SceneTracker is available at https://github.com/wwsource/SceneTracker.
Few-shot Class-incremental Learning: A Survey
Aug 13, 2023



Few-shot Class-Incremental Learning (FSCIL) presents a unique challenge in machine learning, as it necessitates the continuous learning of new classes from sparse labeled training samples without forgetting previous knowledge. While this field has seen recent progress, it remains an active area of exploration. This paper aims to provide a comprehensive and systematic review of FSCIL. In our in-depth examination, we delve into various facets of FSCIL, encompassing the problem definition, the discussion of primary challenges of unreliable empirical risk minimization and the stability-plasticity dilemma, general schemes, and relevant problems of incremental learning and few-shot learning. Besides, we offer an overview of benchmark datasets and evaluation metrics. Furthermore, we introduce the classification methods in FSCIL from data-based, structure-based, and optimization-based approaches and the object detection methods in FSCIL from anchor-free and anchor-based approaches. Beyond these, we illuminate several promising research directions within FSCIL that merit further investigation.
GeoTransformer: Fast and Robust Point Cloud Registration with Geometric Transformer
Jul 25, 2023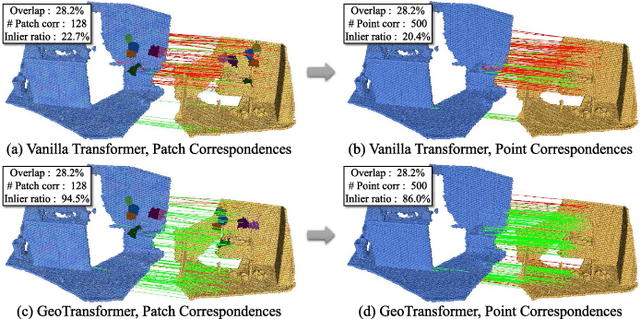
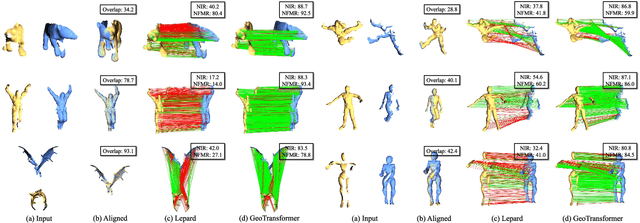
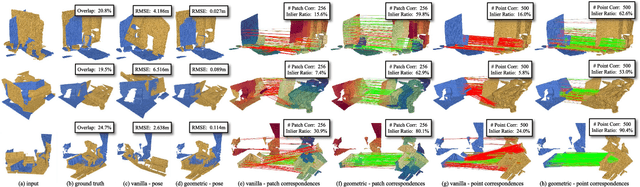
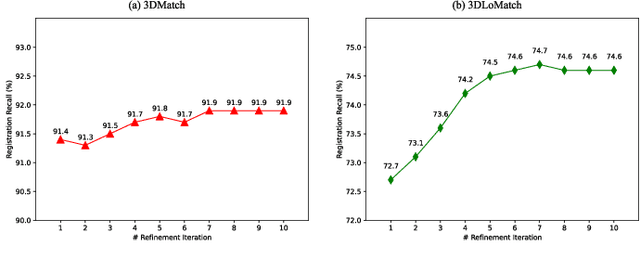
We study the problem of extracting accurate correspondences for point cloud registration. Recent keypoint-free methods have shown great potential through bypassing the detection of repeatable keypoints which is difficult to do especially in low-overlap scenarios. They seek correspondences over downsampled superpoints, which are then propagated to dense points. Superpoints are matched based on whether their neighboring patches overlap. Such sparse and loose matching requires contextual features capturing the geometric structure of the point clouds. We propose Geometric Transformer, or GeoTransformer for short, to learn geometric feature for robust superpoint matching. It encodes pair-wise distances and triplet-wise angles, making it invariant to rigid transformation and robust in low-overlap cases. The simplistic design attains surprisingly high matching accuracy such that no RANSAC is required in the estimation of alignment transformation, leading to $100$ times acceleration. Extensive experiments on rich benchmarks encompassing indoor, outdoor, synthetic, multiway and non-rigid demonstrate the efficacy of GeoTransformer. Notably, our method improves the inlier ratio by $18{\sim}31$ percentage points and the registration recall by over $7$ points on the challenging 3DLoMatch benchmark. Our code and models are available at \url{https://github.com/qinzheng93/GeoTransformer}.