 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Plug-and-Play Learning-based IMU Bias Factor for Robust Visual-Inertial Odometry
Mar 16, 2025



The bias of low-cost Inertial Measurement Units (IMU) is a critical factor affecting the performance of Visual-Inertial Odometry (VIO). In particular, when visual tracking encounters errors, the optimized bias results may deviate significantly from the true values, adversely impacting the system's stability and localization precision. In this paper, we propose a novel plug-and-play framework featuring the Inertial Prior Network (IPNet), which is designed to accurately estimate IMU bias. Recognizing the substantial impact of initial bias errors in low-cost inertial devices on system performance, our network directly leverages raw IMU data to estimate the mean bias, eliminating the dependency on historical estimates in traditional recursive predictions and effectively preventing error propagation. Furthermore, we introduce an iterative approach to calculate the mean value of the bias for network training, addressing the lack of bias labels in many visual-inertial datasets. The framework is evaluated on two public datasets and one self-collected dataset. Extensive experiments demonstrate that our method significantly enhances both localization precision and robustness, with the ATE-RMSE metric improving on average by 46\%. The source code and video will be available at \textcolor{red}{https://github.com/yiyscut/VIO-IPNet.git}.
Toward Scalable Multirobot Control: Fast Policy Learning in Distributed MPC
Dec 27, 2024



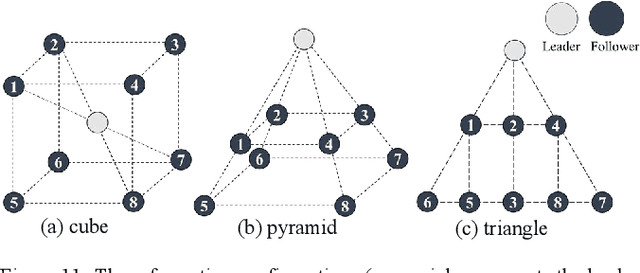
Distributed model predictive control (DMPC) is promising in achieving optimal cooperative control in multirobot systems (MRS). However, real-time DMPC implementation relies on numerical optimization tools to periodically calculate local control sequences online. This process is computationally demanding and lacks scalability for large-scale, nonlinear MRS. This article proposes a novel distributed learning-based predictive control (DLPC) framework for scalable multirobot control. Unlike conventional DMPC methods that calculate open-loop control sequences, our approach centers around a computationally fast and efficient distributed policy learning algorithm that generates explicit closed-loop DMPC policies for MRS without using numerical solvers. The policy learning is executed incrementally and forward in time in each prediction interval through an online distributed actor-critic implementation. The control policies are successively updated in a receding-horizon manner, enabling fast and efficient policy learning with the closed-loop stability guarantee. The learned control policies could be deployed online to MRS with varying robot scales, enhancing scalability and transferability for large-scale MRS. Furthermore, we extend our methodology to address the multirobot safe learning challenge through a force field-inspired policy learning approach. We validate our approach's effectiveness, scalability, and efficiency through extensive experiments on cooperative tasks of large-scale wheeled robots and multirotor drones. Our results demonstrate the rapid learning and deployment of DMPC policies for MRS with scales up to 10,000 units.
Integrated Design of Cooperative Area Coverage and Target Tracking with Multi-UAV System
Mar 16, 2023This paper systematically studies the cooperative area coverage and target tracking problem of multiple-unmanned aerial vehicles (multi-UAVs). The problem is solved by decomposing into three sub-problems: information fusion, task assignment, and multi-UAV behavior decision-making. Specifically, in the information fusion process, we use the maximum consistency protocol to update the joint estimation states of multi-targets (JESMT) and the area detection information. The area detection information is represented by the equivalent visiting time map (EVTM), which is built based on the detection probability and the actual visiting time of the area. Then, we model the task assignment problem of multi-UAV searching and tracking multi-targets as a network flow model with upper and lower flow bounds. An algorithm named task assignment minimum-cost maximum-flow (TAMM) is proposed. Cooperative behavior decision-making uses Fisher information as the mission reward to obtain the optimal tracking action of the UAV. Furthermore, a coverage behavior decision-making algorithm based on the anti-flocking method is designed for those UAVs assigned the coverage task. Finally, a distributed multi-UAV cooperative area coverage and target tracking algorithm is designed, which integrates information fusion, task assignment, and behavioral decision-making. Numerical and hardware-in-the-loop simulation results show that the proposed method can achieve persistent area coverage and cooperative target tracking.
Time-Efficient Mars Exploration of Simultaneous Coverage and Charging with Multiple Drones
Nov 16, 2020
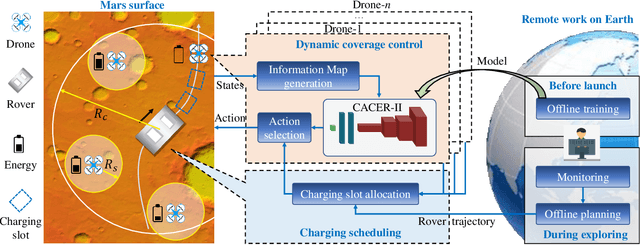
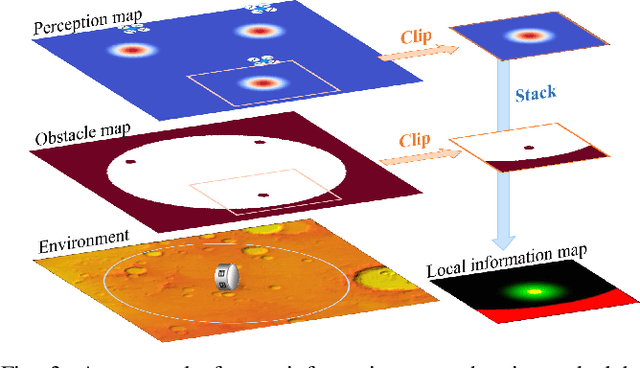
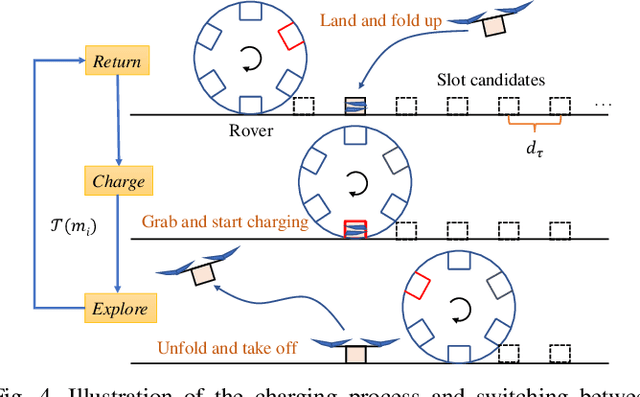
This paper presents a time-efficient scheme for Mars exploration by the cooperation of multiple drones and a rover. To maximize effective coverage of the Mars surface in the long run, a comprehensive framework has been developed with joint consideration for limited energy, sensor model, communication range and safety radius, which we call TIME-SC2 (TIme-efficient Mars Exploration of Simultaneous Coverage and Charging). First, we propose a multi-drone coverage control algorithm by leveraging emerging deep reinforcement learning and design a novel information map to represent dynamic system states. Second, we propose a near-optimal charging scheduling algorithm to navigate each drone to an individual charging slot, and we have proven that there always exists feasible solutions. The attractiveness of this framework not only resides on its ability to maximize exploration efficiency, but also on its high autonomy that has greatly reduced the non-exploring time. Extensive simulations have been conducted to demonstrate the remarkable performance of TIME-SC2 in terms of time-efficiency, adaptivity and flexibility.
A Benchmark for Multi-UAV Task Assignment of an Extended Team Orienteering Problem
Sep 01, 2020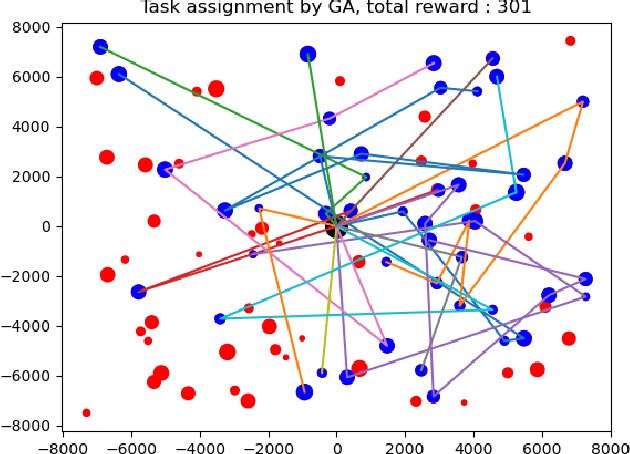
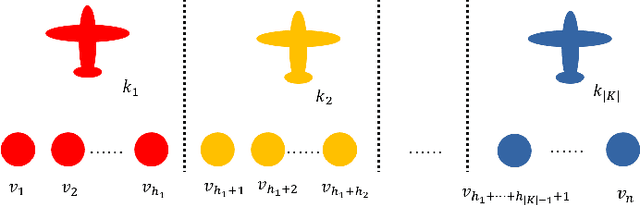
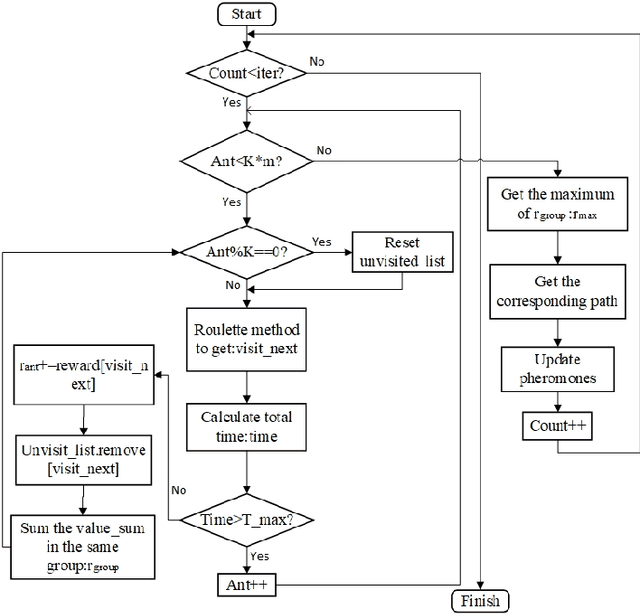
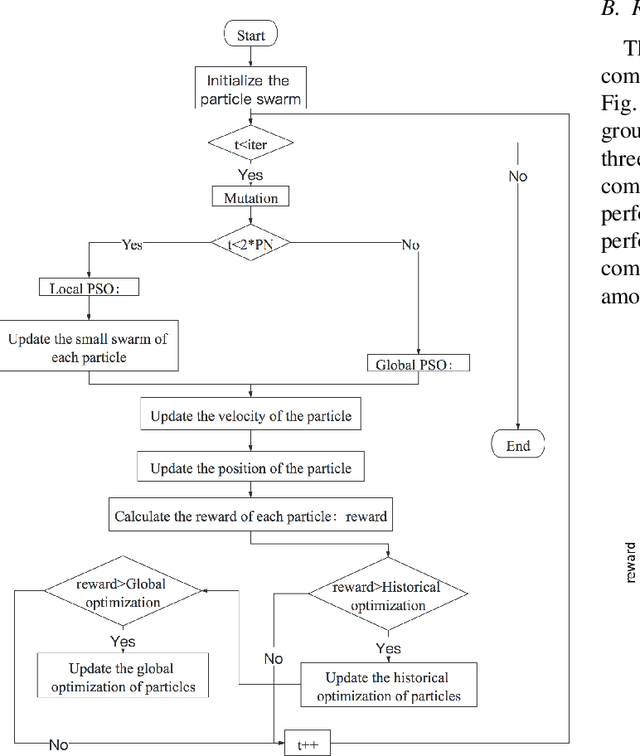
A benchmark for multi-UAV task assignment is presented in order to evaluate different algorithms. An extended Team Orienteering Problem is modeled for a kind of multi-UAV task assignment problem. Three intelligent algorithms, i.e., Genetic Algorithm, Ant Colony Optimization and Particle Swarm Optimization are implemented to solve the problem. A series of experiments with different settings are conducted to evaluate three algorithms. The modeled problem and the evaluation results constitute a benchmark, which can be used to evaluate other algorithms used for multi-UAV task assignment problems.
A Hierarchical Collision Avoidance Architecture for Multiple Fixed-Wing UAVs in an Integrated Airspace
May 29, 2020

This paper studies the collision avoidance problem for autonomous multiple fixedwing UAVs in the complex integrated airspace. By studying and combining the online path planning method, the distributed model predictive control algorithm, and the geometric reactive control approach, a three-layered collision avoidance system integrating conflict detection and resolution procedures is developed for multiple fixed-wing UAVs modeled by unicycle kinematics subject to input constraints. The effectiveness of the proposed methodology is evaluated and validated via test results of comparative simulations under both deterministic and probabilistic sensing conditions.
XTDrone: A Customizable Multi-Rotor UAVs Simulation Platform
Mar 26, 2020
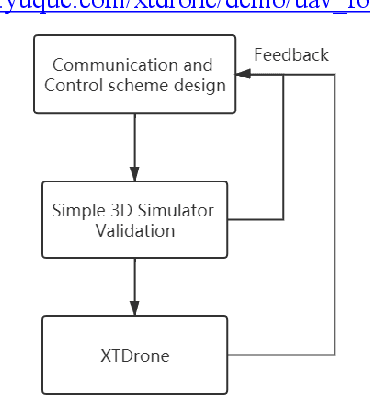
A customizable multi-rotor UAVs simulation platform based on ROS, Gazebo and PX4 is presented. The platform, which is called XTDrone, integrates dynamic models, sensor models, control algorithm, state estimation algorithm, and 3D scenes. The platform supports multi UAVs and other robots. The platform is modular and each module can be modified, which means that users can test its own algorithm, such as SLAM, object detection, motion planning, attitude control, multi-UAV cooperation, and cooperation with other robots on the platform. The platform runs in lockstep, so the simulation speed can be adjusted according to the computer performance. In this paper, two cases, evaluating different visual SLAM algorithm and realizing UAV formation, are shown to demonstrate how the platform works.
Mission Oriented Miniature Fixed-wing UAV Swarms: A Multi-layered and Distributed Architecture
Dec 13, 2019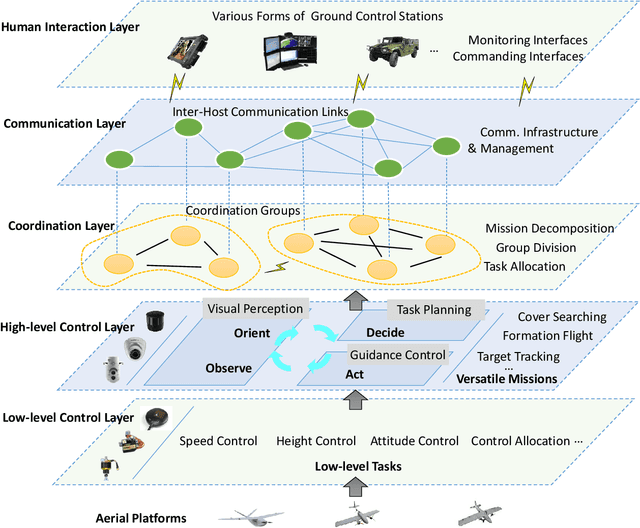
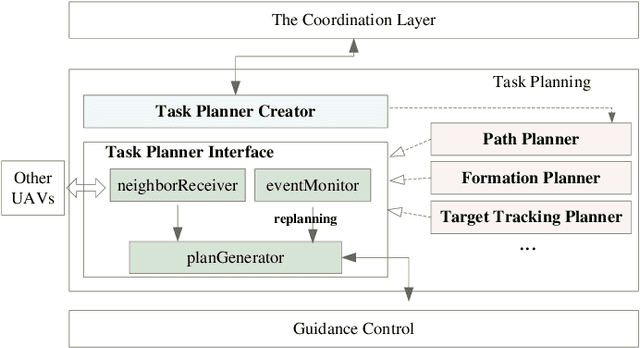
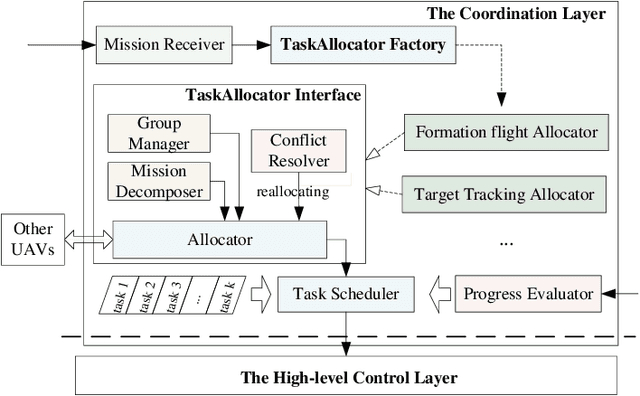
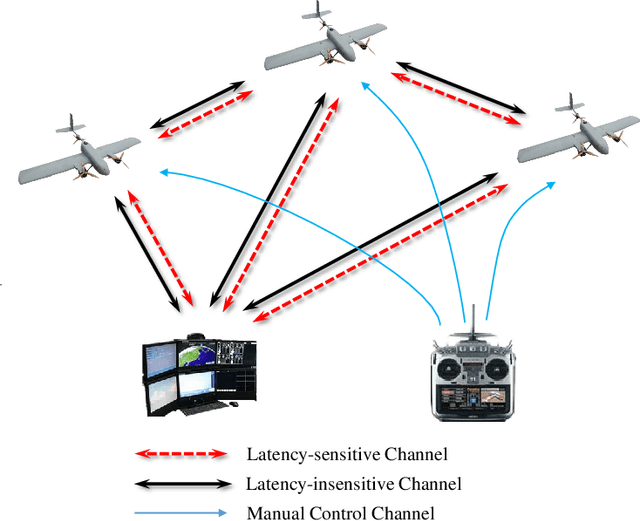
UAV swarms have triggered wide concern due to their potential application values in recent years. While there are studies proposed in terms of the architecture design for UAV swarms, two main challenges still exist: (1) Scalability, supporting a large scale of vehicles; (2) Versatility, integrating diversified missions. To this end, a multi-layered and distributed architecture for mission oriented miniature fixed-wing UAV swarms is presented in this paper. The proposed architecture is built on the concept of modularity. It divides the overall system to five layers: low-level control, high-level control, coordination, communication and human interaction layers, and many modules that can be viewed as black boxes with interfaces of inputs and outputs. In this way, not only the complexity of developing a large system can be reduced, but also the versatility of supporting diversified missions can be ensured. Furthermore, the proposed architecture is fully distributed that each UAV performs the decision-making procedure autonomously so as to achieve better scalability. Moreover, different kinds of aerial platforms can be feasibly extended by using the control allocation matrices and the integrated hardware box. A prototype swarm system based on the proposed architecture is built and the proposed architecture is evaluated through field experiments with a scale of 21 fixed-wing UAVs. Particularly, to the best of our knowledge, this paper is the first work which successfully demonstrates formation flight, target recognition and tracking missions within an integrated architecture for fixed-wing UAV swarms through field experiments.