 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Modality Balanced Online Knowledge Distillation for Brain-Eye-Computer based Dim Object Detection
Jul 02, 2024Advanced cognition can be extracted from the human brain using brain-computer interfaces. Integrating these interfaces with computer vision techniques, which possess efficient feature extraction capabilities, can achieve more robust and accurate detection of dim targets in aerial images. However, existing target detection methods primarily concentrate on homogeneous data, lacking efficient and versatile processing capabilities for heterogeneous multimodal data. In this paper, we first build a brain-eye-computer based object detection system for aerial images under few-shot conditions. This system detects suspicious targets using region proposal networks, evokes the event-related potential (ERP) signal in electroencephalogram (EEG) through the eye-tracking-based slow serial visual presentation (ESSVP) paradigm, and constructs the EEG-image data pairs with eye movement data. Then, an adaptive modality balanced online knowledge distillation (AMBOKD) method is proposed to recognize dim objects with the EEG-image data. AMBOKD fuses EEG and image features using a multi-head attention module, establishing a new modality with comprehensive features. To enhance the performance and robust capability of the fusion modality, simultaneous training and mutual learning between modalities are enabled by end-to-end online knowledge distillation. During the learning process, an adaptive modality balancing module is proposed to ensure multimodal equilibrium by dynamically adjusting the weights of the importance and the training gradients across various modalities. The effectiveness and superiority of our method are demonstrated by comparing it with existing state-of-the-art methods. Additionally, experiments conducted on public datasets and system validations in real-world scenarios demonstrate the reliability and practicality of the proposed system and the designed method.
Time-Efficient Mars Exploration of Simultaneous Coverage and Charging with Multiple Drones
Nov 16, 2020
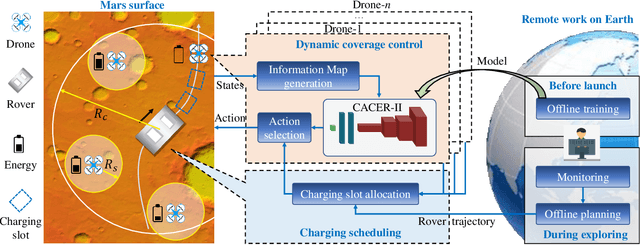
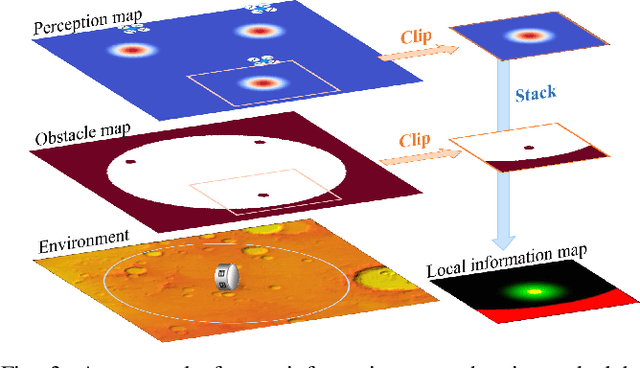
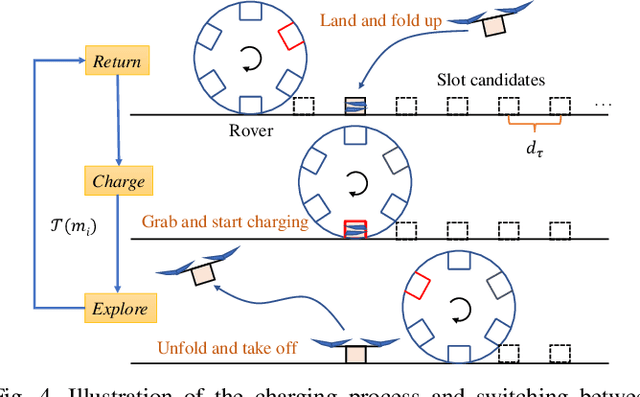
This paper presents a time-efficient scheme for Mars exploration by the cooperation of multiple drones and a rover. To maximize effective coverage of the Mars surface in the long run, a comprehensive framework has been developed with joint consideration for limited energy, sensor model, communication range and safety radius, which we call TIME-SC2 (TIme-efficient Mars Exploration of Simultaneous Coverage and Charging). First, we propose a multi-drone coverage control algorithm by leveraging emerging deep reinforcement learning and design a novel information map to represent dynamic system states. Second, we propose a near-optimal charging scheduling algorithm to navigate each drone to an individual charging slot, and we have proven that there always exists feasible solutions. The attractiveness of this framework not only resides on its ability to maximize exploration efficiency, but also on its high autonomy that has greatly reduced the non-exploring time. Extensive simulations have been conducted to demonstrate the remarkable performance of TIME-SC2 in terms of time-efficiency, adaptivity and flexibility.