 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Modality Balanced Online Knowledge Distillation for Brain-Eye-Computer based Dim Object Detection
Jul 02, 2024Advanced cognition can be extracted from the human brain using brain-computer interfaces. Integrating these interfaces with computer vision techniques, which possess efficient feature extraction capabilities, can achieve more robust and accurate detection of dim targets in aerial images. However, existing target detection methods primarily concentrate on homogeneous data, lacking efficient and versatile processing capabilities for heterogeneous multimodal data. In this paper, we first build a brain-eye-computer based object detection system for aerial images under few-shot conditions. This system detects suspicious targets using region proposal networks, evokes the event-related potential (ERP) signal in electroencephalogram (EEG) through the eye-tracking-based slow serial visual presentation (ESSVP) paradigm, and constructs the EEG-image data pairs with eye movement data. Then, an adaptive modality balanced online knowledge distillation (AMBOKD) method is proposed to recognize dim objects with the EEG-image data. AMBOKD fuses EEG and image features using a multi-head attention module, establishing a new modality with comprehensive features. To enhance the performance and robust capability of the fusion modality, simultaneous training and mutual learning between modalities are enabled by end-to-end online knowledge distillation. During the learning process, an adaptive modality balancing module is proposed to ensure multimodal equilibrium by dynamically adjusting the weights of the importance and the training gradients across various modalities. The effectiveness and superiority of our method are demonstrated by comparing it with existing state-of-the-art methods. Additionally, experiments conducted on public datasets and system validations in real-world scenarios demonstrate the reliability and practicality of the proposed system and the designed method.
A New Transformation Approach for Uplift Modeling with Binary Outcome
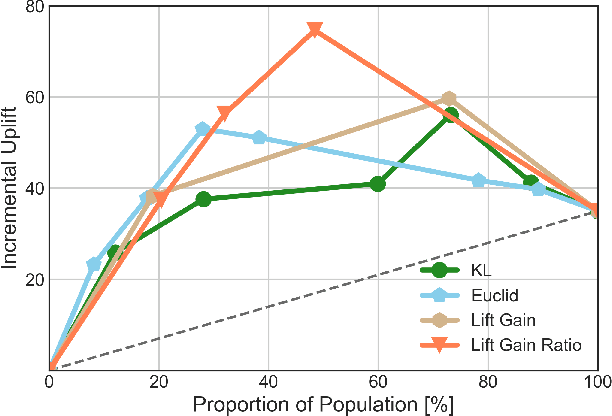
Oct 09, 2023Uplift modeling has been used effectively in fields such as marketing and customer retention, to target those customers who are more likely to respond due to the campaign or treatment. Essentially, it is a machine learning technique that predicts the gain from performing some action with respect to not taking it. A popular class of uplift models is the transformation approach that redefines the target variable with the original treatment indicator. These transformation approaches only need to train and predict the difference in outcomes directly. The main drawback of these approaches is that in general it does not use the information in the treatment indicator beyond the construction of the transformed outcome and usually is not efficient. In this paper, we design a novel transformed outcome for the case of the binary target variable and unlock the full value of the samples with zero outcome. From a practical perspective, our new approach is flexible and easy to use. Experimental results on synthetic and real-world datasets obviously show that our new approach outperforms the traditional one. At present, our new approach has already been applied to precision marketing in a China nation-wide financial holdings group.
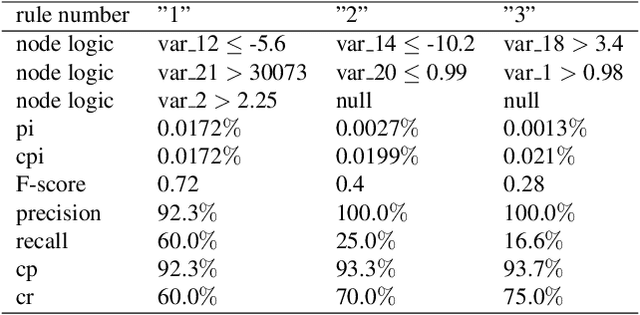
Causal Inference Based Single-branch Ensemble Trees For Uplift Modeling
Feb 03, 2023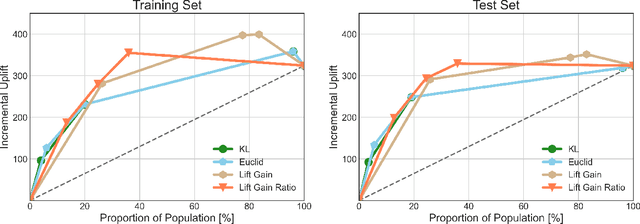


In this manuscript (ms), we propose causal inference based single-branch ensemble trees for uplift modeling, namely CIET. Different from standard classification methods for predictive probability modeling, CIET aims to achieve the change in the predictive probability of outcome caused by an action or a treatment. According to our CIET, two partition criteria are specifically designed to maximize the difference in outcome distribution between the treatment and control groups. Next, a novel single-branch tree is built by taking a top-down node partition approach, and the remaining samples are censored since they are not covered by the upper node partition logic. Repeating the tree-building process on the censored data, single-branch ensemble trees with a set of inference rules are thus formed. Moreover, CIET is experimentally demonstrated to outperform previous approaches for uplift modeling in terms of both area under uplift curve (AUUC) and Qini coefficient significantly. At present, CIET has already been applied to online personal loans in a national financial holdings group in China. CIET will also be of use to analysts applying machine learning techniques to causal inference in broader business domains such as web advertising, medicine and economics.
Collision-Free Flocking with a Dynamic Squad of Fixed-Wing UAVs Using Deep Reinforcement Learning
Jan 20, 2021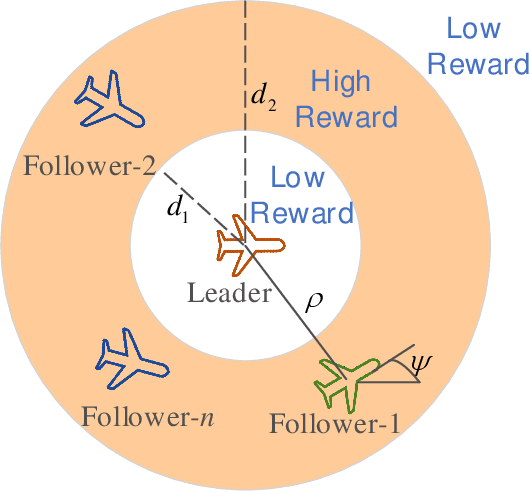
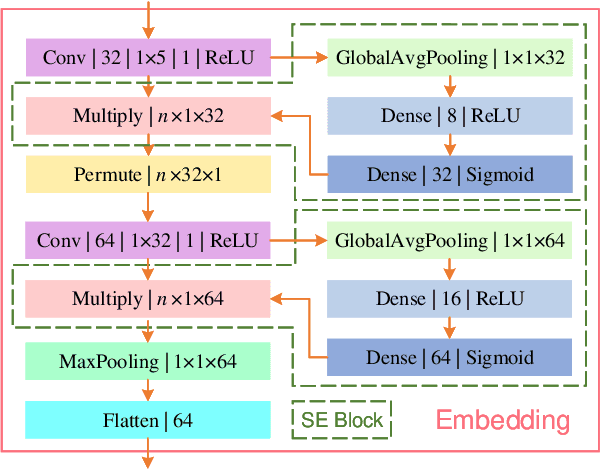
Developing the collision-free flocking behavior for a dynamic squad of fixed-wing UAVs is still a challenge due to kinematic complexity and environmental uncertainty. In this paper, we deal with the decentralized leader-follower flocking control problem through deep reinforcement learning (DRL). Specifically, we formulate a decentralized DRL-based decision making framework from the perspective of every follower, where a collision avoidance mechanism is integrated into the flocking controller. Then, we propose a novel reinforcement learning algorithm CACER-II for training a shared control policy for all the followers. Besides, we design a plug-n-play embedding module based on convolutional neural networks and the attention mechanism. As a result, the variable-length system state can be encoded into a fixed-length embedding vector, which makes the learned DRL policies independent with the number or the order of followers. Finally, numerical simulation results demonstrate the effectiveness of the proposed method, and the learned policies can be directly transferred to semiphysical simulation without any parameter finetuning.
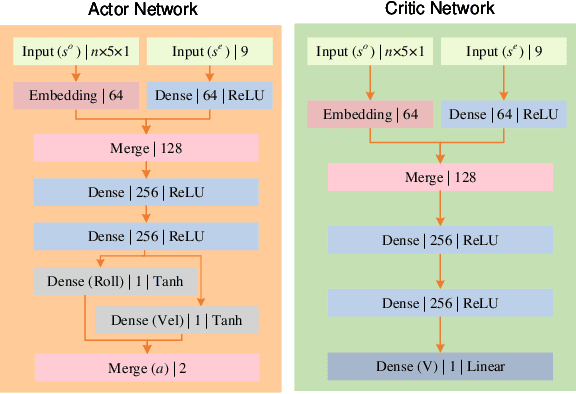
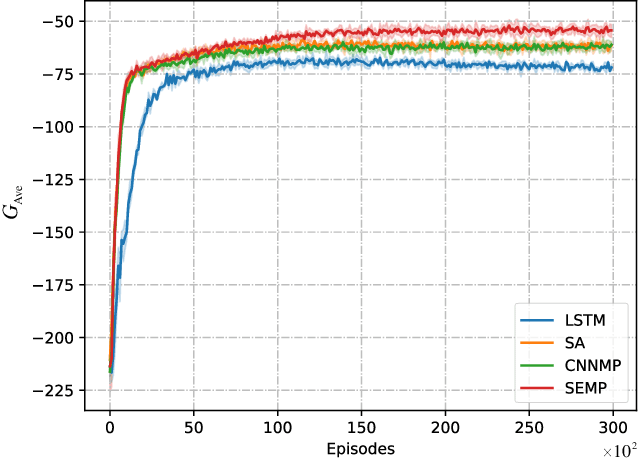
Time-Efficient Mars Exploration of Simultaneous Coverage and Charging with Multiple Drones
Nov 16, 2020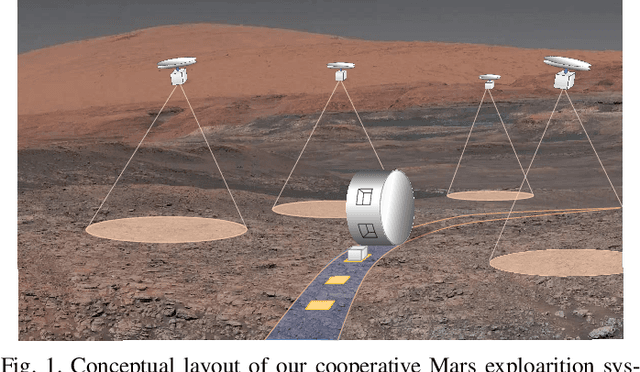
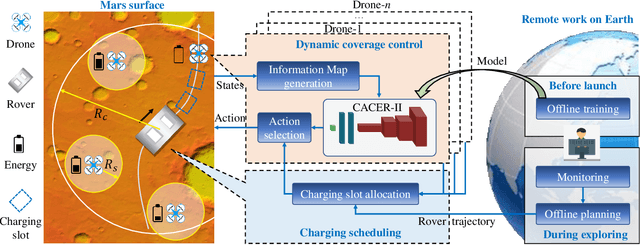
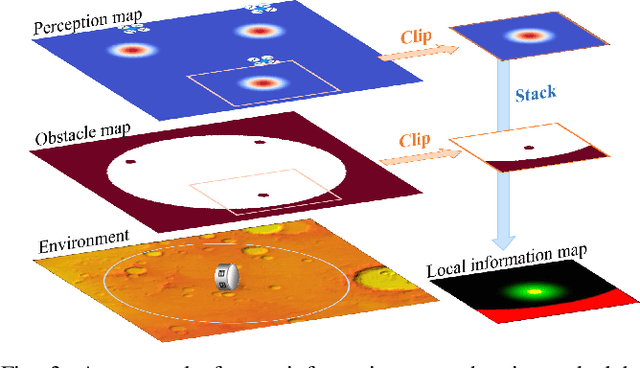
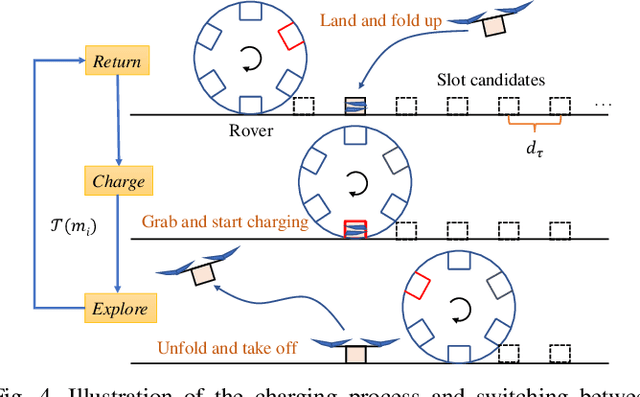
This paper presents a time-efficient scheme for Mars exploration by the cooperation of multiple drones and a rover. To maximize effective coverage of the Mars surface in the long run, a comprehensive framework has been developed with joint consideration for limited energy, sensor model, communication range and safety radius, which we call TIME-SC2 (TIme-efficient Mars Exploration of Simultaneous Coverage and Charging). First, we propose a multi-drone coverage control algorithm by leveraging emerging deep reinforcement learning and design a novel information map to represent dynamic system states. Second, we propose a near-optimal charging scheduling algorithm to navigate each drone to an individual charging slot, and we have proven that there always exists feasible solutions. The attractiveness of this framework not only resides on its ability to maximize exploration efficiency, but also on its high autonomy that has greatly reduced the non-exploring time. Extensive simulations have been conducted to demonstrate the remarkable performance of TIME-SC2 in terms of time-efficiency, adaptivity and flexibility.
A Vertical Federated Learning Method for Interpretable Scorecard and Its Application in Credit Scoring
Sep 14, 2020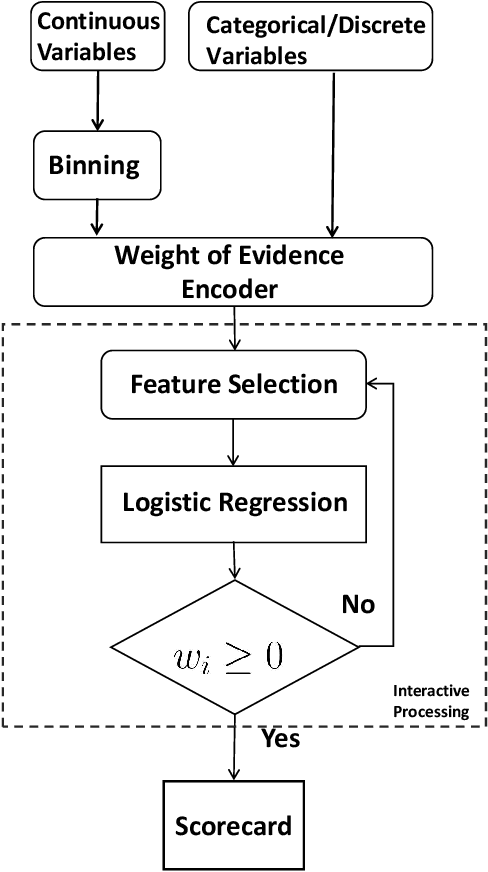
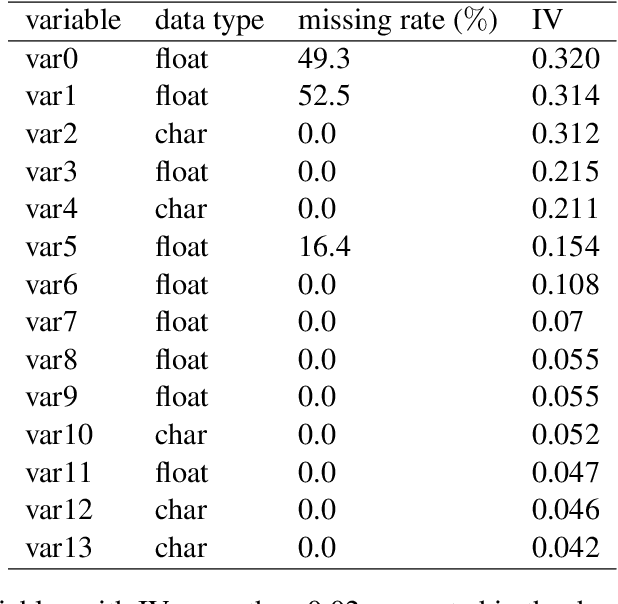
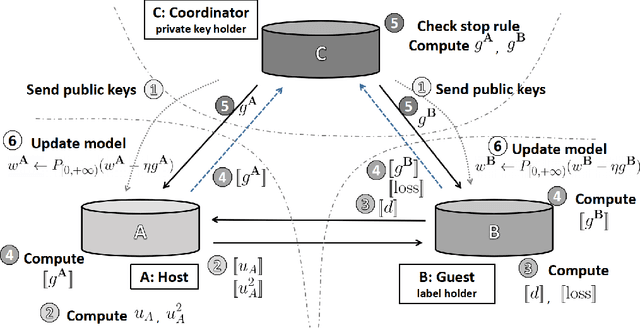
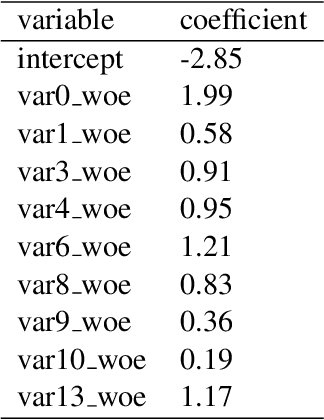
With the success of big data and artificial intelligence in many fields, the applications of big data driven models are expected in financial risk management especially credit scoring and rating. Under the premise of data privacy protection, we propose a projected gradient-based method in the vertical federated learning framework for the traditional scorecard, which is based on logistic regression with bounded constraints, namely FL-LRBC. The latter enables multiple agencies to jointly train an optimized scorecard model in a single training session. It leads to the formation of the model with positive coefficients, while the time-consuming parameter-tuning process can be avoided. Moreover, the performance in terms of both AUC and the Kolmogorov-Smirnov (KS) statistics is significantly improved due to data enrichment using FL-LRBC. At present, FL-LRBC has already been applied to credit business in a China nation-wide financial holdings group.
A Federated F-score Based Ensemble Model for Automatic Rule Extraction
Jul 17, 2020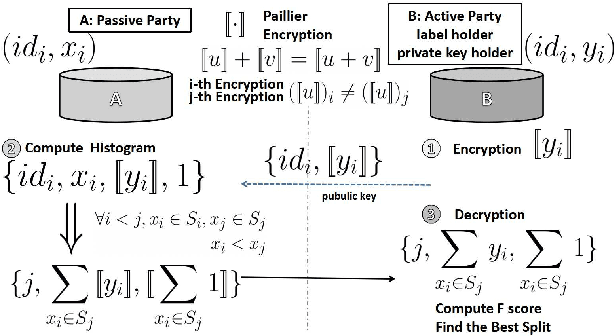
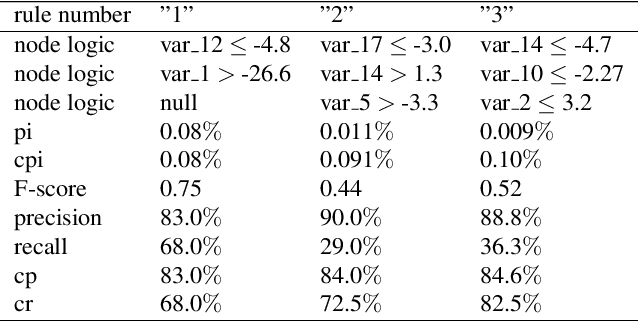
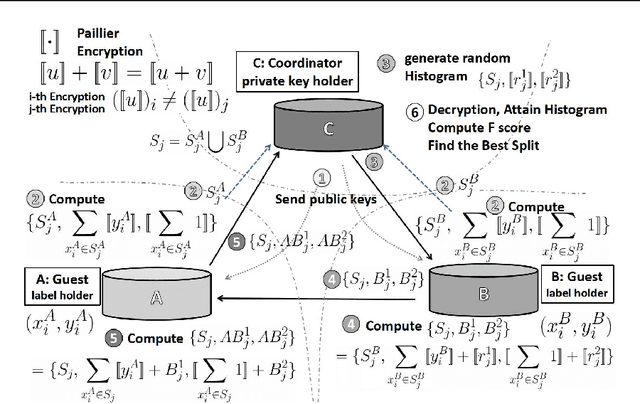
In this manuscript, we propose a federated F-score based ensemble tree model for automatic rule extraction, namely Fed-FEARE. Under the premise of data privacy protection, Fed-FEARE enables multiple agencies to jointly extract set of rules both vertically and horizontally. Compared with that without federated learning, measures in evaluating model performance are highly improved. At present, Fed-FEARE has already been applied to multiple business, including anti-fraud and precision marketing, in a China nation-wide financial holdings group.
Mission Oriented Miniature Fixed-wing UAV Swarms: A Multi-layered and Distributed Architecture
Dec 13, 2019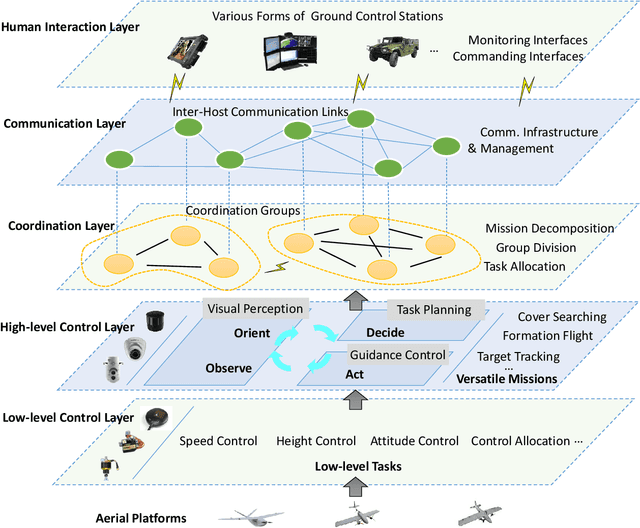
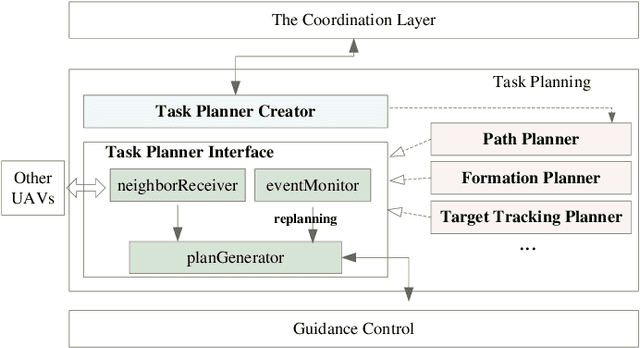
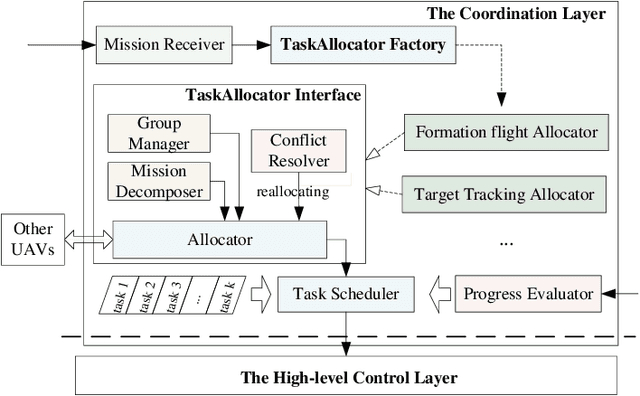
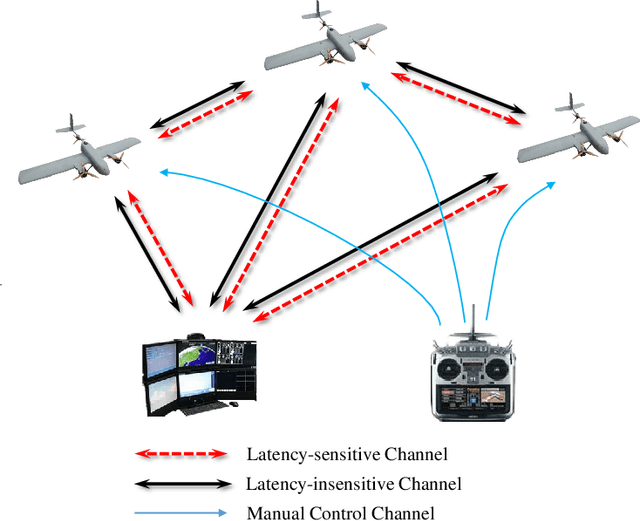
UAV swarms have triggered wide concern due to their potential application values in recent years. While there are studies proposed in terms of the architecture design for UAV swarms, two main challenges still exist: (1) Scalability, supporting a large scale of vehicles; (2) Versatility, integrating diversified missions. To this end, a multi-layered and distributed architecture for mission oriented miniature fixed-wing UAV swarms is presented in this paper. The proposed architecture is built on the concept of modularity. It divides the overall system to five layers: low-level control, high-level control, coordination, communication and human interaction layers, and many modules that can be viewed as black boxes with interfaces of inputs and outputs. In this way, not only the complexity of developing a large system can be reduced, but also the versatility of supporting diversified missions can be ensured. Furthermore, the proposed architecture is fully distributed that each UAV performs the decision-making procedure autonomously so as to achieve better scalability. Moreover, different kinds of aerial platforms can be feasibly extended by using the control allocation matrices and the integrated hardware box. A prototype swarm system based on the proposed architecture is built and the proposed architecture is evaluated through field experiments with a scale of 21 fixed-wing UAVs. Particularly, to the best of our knowledge, this paper is the first work which successfully demonstrates formation flight, target recognition and tracking missions within an integrated architecture for fixed-wing UAV swarms through field experiments.