 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Modality Balanced Online Knowledge Distillation for Brain-Eye-Computer based Dim Object Detection
Jul 02, 2024Advanced cognition can be extracted from the human brain using brain-computer interfaces. Integrating these interfaces with computer vision techniques, which possess efficient feature extraction capabilities, can achieve more robust and accurate detection of dim targets in aerial images. However, existing target detection methods primarily concentrate on homogeneous data, lacking efficient and versatile processing capabilities for heterogeneous multimodal data. In this paper, we first build a brain-eye-computer based object detection system for aerial images under few-shot conditions. This system detects suspicious targets using region proposal networks, evokes the event-related potential (ERP) signal in electroencephalogram (EEG) through the eye-tracking-based slow serial visual presentation (ESSVP) paradigm, and constructs the EEG-image data pairs with eye movement data. Then, an adaptive modality balanced online knowledge distillation (AMBOKD) method is proposed to recognize dim objects with the EEG-image data. AMBOKD fuses EEG and image features using a multi-head attention module, establishing a new modality with comprehensive features. To enhance the performance and robust capability of the fusion modality, simultaneous training and mutual learning between modalities are enabled by end-to-end online knowledge distillation. During the learning process, an adaptive modality balancing module is proposed to ensure multimodal equilibrium by dynamically adjusting the weights of the importance and the training gradients across various modalities. The effectiveness and superiority of our method are demonstrated by comparing it with existing state-of-the-art methods. Additionally, experiments conducted on public datasets and system validations in real-world scenarios demonstrate the reliability and practicality of the proposed system and the designed method.
Collision-Free Flocking with a Dynamic Squad of Fixed-Wing UAVs Using Deep Reinforcement Learning
Jan 20, 2021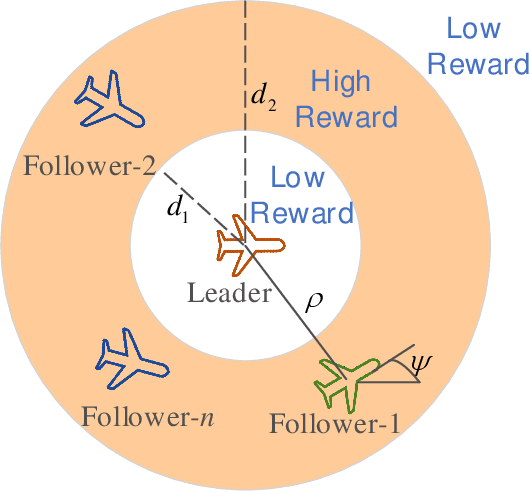
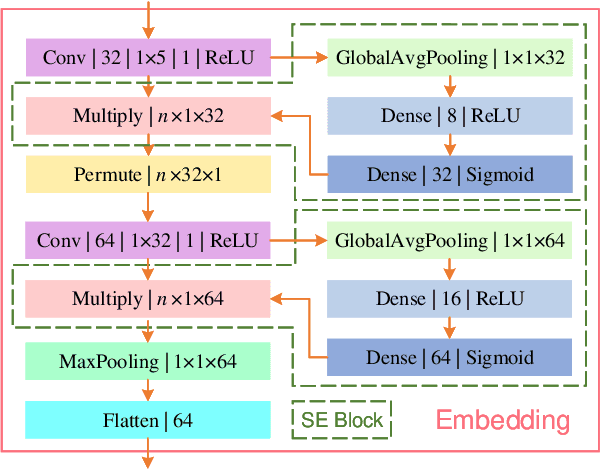
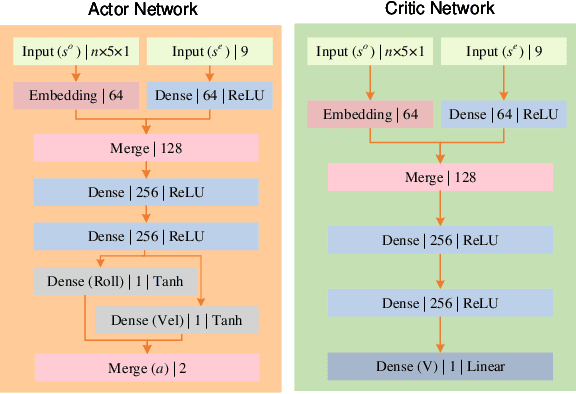
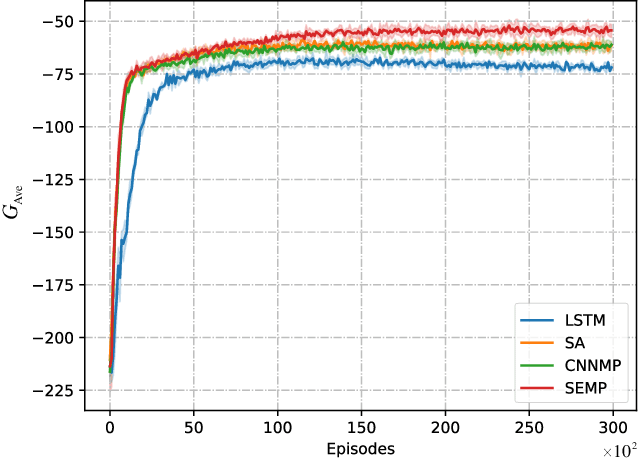
Developing the collision-free flocking behavior for a dynamic squad of fixed-wing UAVs is still a challenge due to kinematic complexity and environmental uncertainty. In this paper, we deal with the decentralized leader-follower flocking control problem through deep reinforcement learning (DRL). Specifically, we formulate a decentralized DRL-based decision making framework from the perspective of every follower, where a collision avoidance mechanism is integrated into the flocking controller. Then, we propose a novel reinforcement learning algorithm CACER-II for training a shared control policy for all the followers. Besides, we design a plug-n-play embedding module based on convolutional neural networks and the attention mechanism. As a result, the variable-length system state can be encoded into a fixed-length embedding vector, which makes the learned DRL policies independent with the number or the order of followers. Finally, numerical simulation results demonstrate the effectiveness of the proposed method, and the learned policies can be directly transferred to semiphysical simulation without any parameter finetuning.