 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeXTDrone: A Customizable Multi-Rotor UAVs Simulation Platform
Mar 26, 2020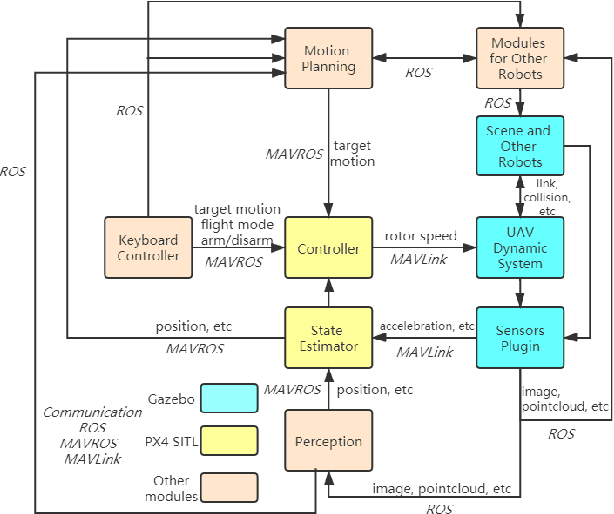
A customizable multi-rotor UAVs simulation platform based on ROS, Gazebo and PX4 is presented. The platform, which is called XTDrone, integrates dynamic models, sensor models, control algorithm, state estimation algorithm, and 3D scenes. The platform supports multi UAVs and other robots. The platform is modular and each module can be modified, which means that users can test its own algorithm, such as SLAM, object detection, motion planning, attitude control, multi-UAV cooperation, and cooperation with other robots on the platform. The platform runs in lockstep, so the simulation speed can be adjusted according to the computer performance. In this paper, two cases, evaluating different visual SLAM algorithm and realizing UAV formation, are shown to demonstrate how the platform works.