 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient and Real-Time Motion Planning for Robotics Using Projection-Based Optimization
Jun 17, 2025Generating motions for robots interacting with objects of various shapes is a complex challenge, further complicated by the robot geometry and multiple desired behaviors. While current robot programming tools (such as inverse kinematics, collision avoidance, and manipulation planning) often treat these problems as constrained optimization, many existing solvers focus on specific problem domains or do not exploit geometric constraints effectively. We propose an efficient first-order method, Augmented Lagrangian Spectral Projected Gradient Descent (ALSPG), which leverages geometric projections via Euclidean projections, Minkowski sums, and basis functions. We show that by using geometric constraints rather than full constraints and gradients, ALSPG significantly improves real-time performance. Compared to second-order methods like iLQR, ALSPG remains competitive in the unconstrained case. We validate our method through toy examples and extensive simulations, and demonstrate its effectiveness on a 7-axis Franka robot, a 6-axis P-Rob robot and a 1:10 scale car in real-world experiments. Source codes, experimental data and videos are available on the project webpage: https://sites.google.com/view/alspg-oc
FSDP: Fast and Safe Data-Driven Overtaking Trajectory Planning for Head-to-Head Autonomous Racing Competitions
Mar 08, 2025Generating overtaking trajectories in autonomous racing is a challenging task, as the trajectory must satisfy the vehicle's dynamics and ensure safety and real-time performance running on resource-constrained hardware. This work proposes the Fast and Safe Data-Driven Planner to address this challenge. Sparse Gaussian predictions are introduced to improve both the computational efficiency and accuracy of opponent predictions. Furthermore, the proposed approach employs a bi-level quadratic programming framework to generate an overtaking trajectory leveraging the opponent predictions. The first level uses polynomial fitting to generate a rough trajectory, from which reference states and control inputs are derived for the second level. The second level formulates a model predictive control optimization problem in the Frenet frame, generating a trajectory that satisfies both kinematic feasibility and safety. Experimental results on the F1TENTH platform show that our method outperforms the State-of-the-Art, achieving an 8.93% higher overtaking success rate, allowing the maximum opponent speed, ensuring a smoother ego trajectory, and reducing 74.04% computational time compared to the Predictive Spliner method. The code is available at: https://github.com/ZJU-DDRX/FSDP.
Safe Dynamic Motion Generation in Configuration Space Using Differentiable Distance Fields
Dec 21, 2024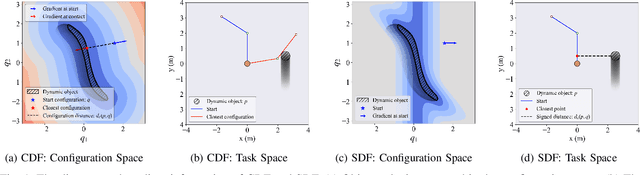
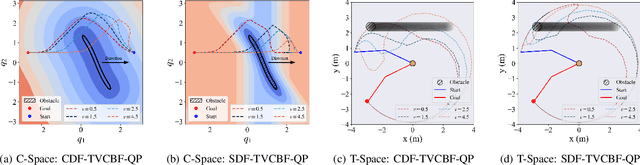
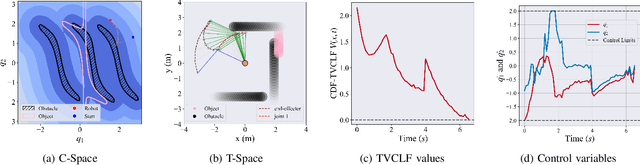
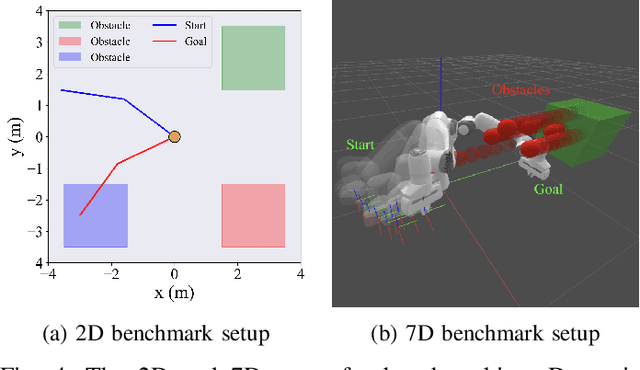
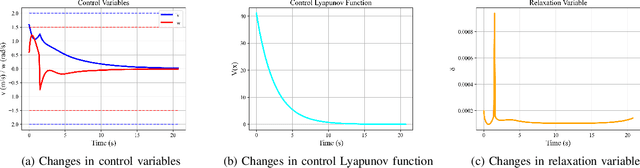
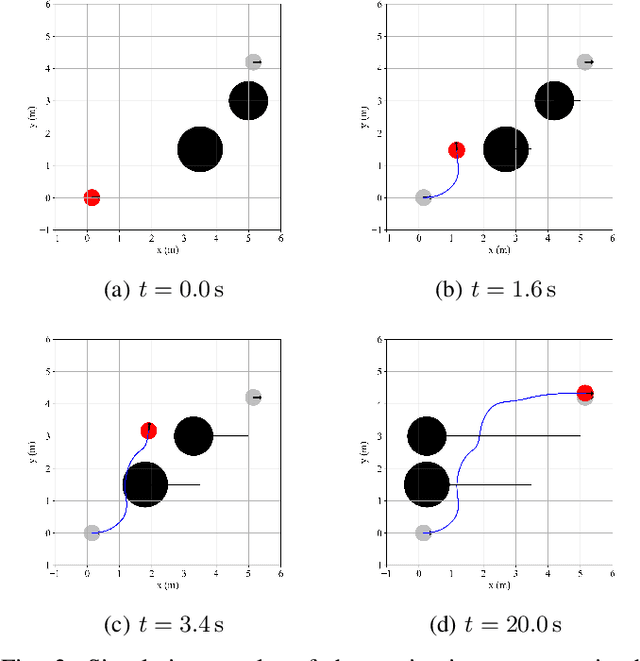
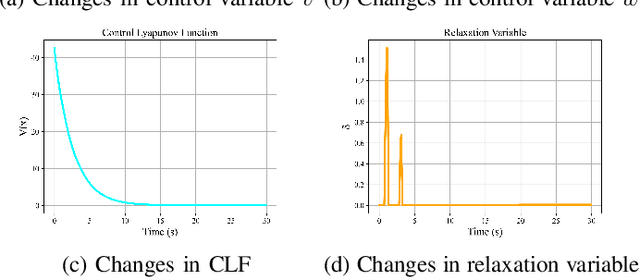
Generating collision-free motions in dynamic environments is a challenging problem for high-dimensional robotics, particularly under real-time constraints. Control Barrier Functions (CBFs), widely utilized in safety-critical control, have shown significant potential for motion generation. However, for high-dimensional robot manipulators, existing QP formulations and CBF-based methods rely on positional information, overlooking higher-order derivatives such as velocities. This limitation may lead to reduced success rates, decreased performance, and inadequate safety constraints. To address this, we construct time-varying CBFs (TVCBFs) that consider velocity conditions for obstacles. Our approach leverages recent developments on distance fields for articulated manipulators, a differentiable representation that enables the mapping of objects' position and velocity into the robot's joint space, offering a comprehensive understanding of the system's interactions. This allows the manipulator to be treated as a point-mass system thus simplifying motion generation tasks. Additionally, we introduce a time-varying control Lyapunov function (TVCLF) to enable whole-body contact motions. Our approach integrates the TVCBF, TVCLF, and manipulator physical constraints within a unified QP framework. We validate our method through simulations and comparisons with state-of-the-art approaches, demonstrating its effectiveness on a 7-axis Franka robot in real-world experiments.
GeoPro-VO: Dynamic Obstacle Avoidance with Geometric Projector Based on Velocity Obstacle
Mar 15, 2024Optimization-based approaches are widely employed to generate optimal robot motions while considering various constraints, such as robot dynamics, collision avoidance, and physical limitations. It is crucial to efficiently solve the optimization problems in practice, yet achieving rapid computations remains a great challenge for optimization-based approaches with nonlinear constraints. In this paper, we propose a geometric projector for dynamic obstacle avoidance based on velocity obstacle (GeoPro-VO) by leveraging the projection feature of the velocity cone set represented by VO. Furthermore, with the proposed GeoPro-VO and the augmented Lagrangian spectral projected gradient descent (ALSPG) algorithm, we transform an initial mixed integer nonlinear programming problem (MINLP) in the form of constrained model predictive control (MPC) into a sub-optimization problem and solve it efficiently. Numerical simulations are conducted to validate the fast computing speed of our approach and its capability for reliable dynamic obstacle avoidance.
Whole-body Dynamic Collision Avoidance with Time-varying Control Barrier Functions
Nov 30, 2023Recently, there has been increasing attention in robot research towards the whole-body collision avoidance. In this paper, we propose a safety-critical controller that utilizes time-varying control barrier functions (time varying CBFs) constructed by Robo-centric Euclidean Signed Distance Field (RC-ESDF) to achieve dynamic collision avoidance. The RC-ESDF is constructed in the robot body frame and solely relies on the robot's shape, eliminating the need for real-time updates to save computational resources. Additionally, we design two control Lyapunov functions (CLFs) to ensure that the robot can reach its destination. To enable real-time application, our safety-critical controller which incorporates CLFs and CBFs as constraints is formulated as a quadratic program (QP) optimization problem. We conducted numerical simulations on two different dynamics of an L-shaped robot to verify the effectiveness of our proposed approach.
Fast Path Planning for Autonomous Vehicle Parking with Safety-Guarantee using Hamilton-Jacobi Reachability
Oct 21, 2023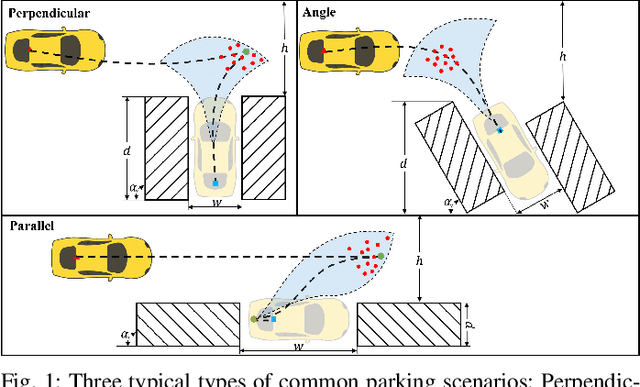
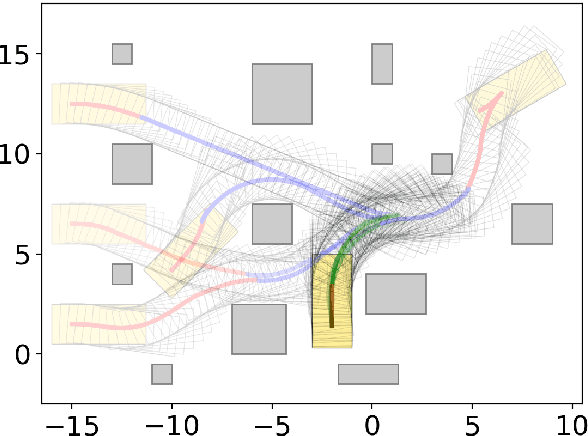
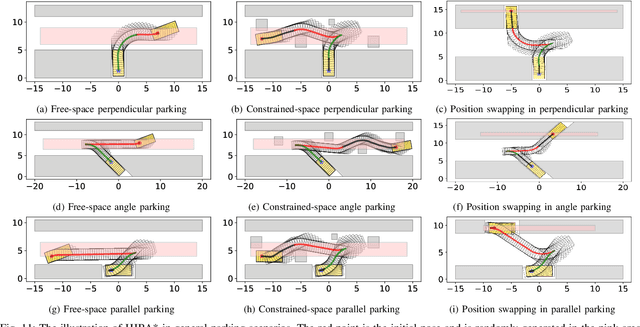
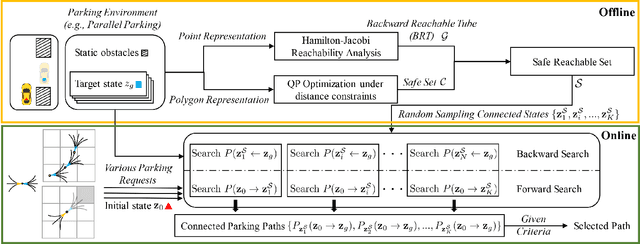
We present a fast planning architecture called Hamilton-Jacobi-based bidirectional A* (HJBA*) to solve general tight parking scenarios. The algorithm is a two-layer composed of a high-level HJ-based reachability analysis and a lower-level bidirectional A* search algorithm. In high-level reachability analysis, a backward reachable tube (BRT) concerning vehicle dynamics is computed by the HJ analysis and it intersects with a safe set to get a safe reachable set. The safe set is defined by constraints of positive signed distances for obstacles in the environment and computed by solving QP optimization problems offline. For states inside the intersection set, i.e., the safe reachable set, the computed backward reachable tube ensures they are reachable subjected to system dynamics and input bounds, and the safe set guarantees they satisfy parking safety with respect to obstacles in different shapes. For online computation, randomized states are sampled from the safe reachable set, and used as heuristic guide points to be considered in the bidirectional A* search. The bidirectional A* search is paralleled for each randomized state from the safe reachable set. We show that the proposed two-level planning algorithm is able to solve different parking scenarios effectively and computationally fast for typical parking requests. We validate our algorithm through simulations in large-scale randomized parking scenarios and demonstrate it to be able to outperform other state-of-the-art parking planning algorithms.
Geometric Projectors: Geometric Constraints based Optimization for Robot Behaviors
Sep 15, 2023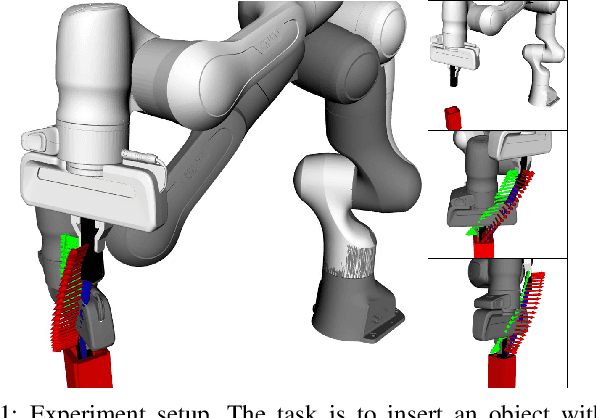



Generating motion for robots that interact with objects of various shapes is a complex challenge, further complicated when the robot's own geometry and multiple desired behaviors are considered. To address this issue, we introduce a new framework based on Geometric Projectors (GeoPro) for constrained optimization. This novel framework allows for the generation of task-agnostic behaviors that are compliant with geometric constraints. GeoPro streamlines the design of behaviors in both task and configuration spaces, offering diverse functionalities such as collision avoidance and goal-reaching, while maintaining high computational efficiency. We validate the efficacy of our work through simulations and Franka Emika robotic experiments, comparing its performance against state-of-the-art methodologies. This comprehensive evaluation highlights GeoPro's versatility in accommodating robots with varying dynamics and precise geometric shapes. For additional materials, please visit: https://www.xueminchi.com/publications/geopro
Obstacle Avoidance for Unicycle-Modelled Mobile Robots with Time-varying Control Barrier Functions
Jul 17, 2023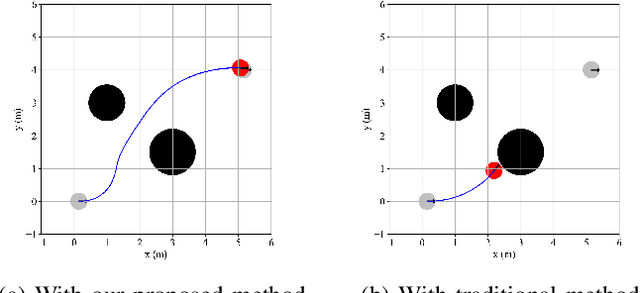
In this paper, we propose a safety-critical controller based on time-varying control barrier functions (CBFs) for a robot with an unicycle model in the continuous-time domain to achieve navigation and dynamic collision avoidance. Unlike previous works, our proposed approach can control both linear and angular velocity to avoid collision with obstacles, overcoming the limitation of confined control performance due to the lack of control variable. To ensure that the robot reaches its destination, we also design a control Lyapunov function (CLF). Our safety-critical controller is formulated as a quadratic program (QP) optimization problem that incorporates CLF and CBFs as constraints, enabling real-time application for navigation and dynamic collision avoidance. Numerical simulations are conducted to verify the effectiveness of our proposed approach.
Instance-Variant Loss with Gaussian RBF Kernel for 3D Cross-modal Retriveal
May 07, 2023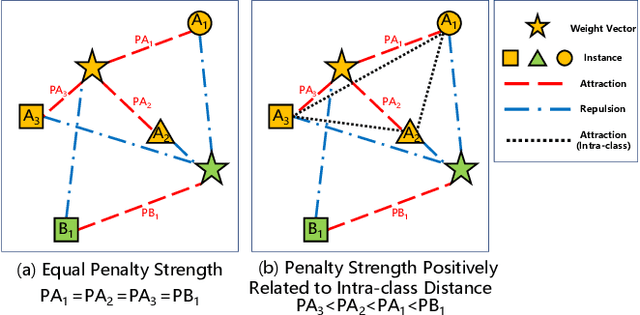
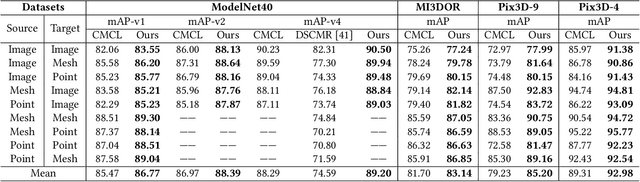
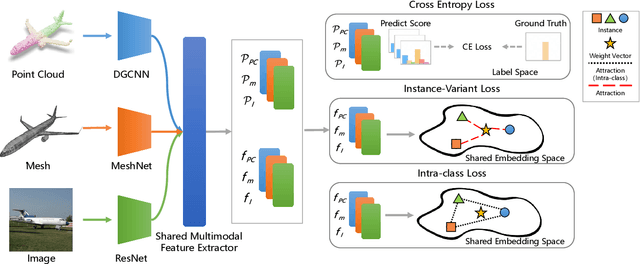
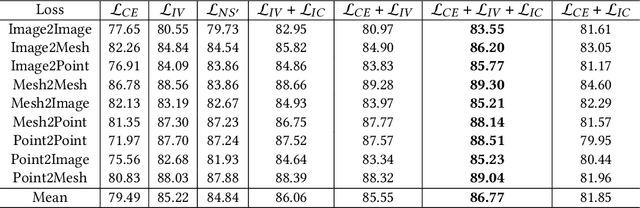
3D cross-modal retrieval is gaining attention in the multimedia community. Central to this topic is learning a joint embedding space to represent data from different modalities, such as images, 3D point clouds, and polygon meshes, to extract modality-invariant and discriminative features. Hence, the performance of cross-modal retrieval methods heavily depends on the representational capacity of this embedding space. Existing methods treat all instances equally, applying the same penalty strength to instances with varying degrees of difficulty, ignoring the differences between instances. This can result in ambiguous convergence or local optima, severely compromising the separability of the feature space. To address this limitation, we propose an Instance-Variant loss to assign different penalty strengths to different instances, improving the space separability. Specifically, we assign different penalty weights to instances positively related to their intra-class distance. Simultaneously, we reduce the cross-modal discrepancy between features by learning a shared weight vector for the same class data from different modalities. By leveraging the Gaussian RBF kernel to evaluate sample similarity, we further propose an Intra-Class loss function that minimizes the intra-class distance among same-class instances. Extensive experiments on three 3D cross-modal datasets show that our proposed method surpasses recent state-of-the-art approaches.
Velocity Obstacle for Polytopic Collision Avoidance for Distributed Multi-robot Systems
Apr 17, 2023



Obstacle avoidance for multi-robot navigation with polytopic shapes is challenging. Existing works simplify the system dynamics or consider it as a convex or non-convex optimization problem with positive distance constraints between robots, which limits real-time performance and scalability. Additionally, generating collision-free behavior for polytopic-shaped robots is harder due to implicit and non-differentiable distance functions between polytopes. In this paper, we extend the concept of velocity obstacle (VO) principle for polytopic-shaped robots and propose a novel approach to construct the VO in the function of vertex coordinates and other robot's states. Compared with existing work about obstacle avoidance between polytopic-shaped robots, our approach is much more computationally efficient as the proposed approach for construction of VO between polytopes is optimization-free. Based on VO representation for polytopic shapes, we later propose a navigation approach for distributed multi-robot systems. We validate our proposed VO representation and navigation approach in multiple challenging scenarios including large-scale randomized tests, and our approach outperforms the state of art in many evaluation metrics, including completion rate, deadlock rate, and the average travel distance.