 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient and Real-Time Motion Planning for Robotics Using Projection-Based Optimization
Jun 17, 2025Generating motions for robots interacting with objects of various shapes is a complex challenge, further complicated by the robot geometry and multiple desired behaviors. While current robot programming tools (such as inverse kinematics, collision avoidance, and manipulation planning) often treat these problems as constrained optimization, many existing solvers focus on specific problem domains or do not exploit geometric constraints effectively. We propose an efficient first-order method, Augmented Lagrangian Spectral Projected Gradient Descent (ALSPG), which leverages geometric projections via Euclidean projections, Minkowski sums, and basis functions. We show that by using geometric constraints rather than full constraints and gradients, ALSPG significantly improves real-time performance. Compared to second-order methods like iLQR, ALSPG remains competitive in the unconstrained case. We validate our method through toy examples and extensive simulations, and demonstrate its effectiveness on a 7-axis Franka robot, a 6-axis P-Rob robot and a 1:10 scale car in real-world experiments. Source codes, experimental data and videos are available on the project webpage: https://sites.google.com/view/alspg-oc
Projection-based first-order constrained optimization solver for robotics
Jun 30, 2023Robot programming tools ranging from inverse kinematics (IK) to model predictive control (MPC) are most often described as constrained optimization problems. Even though there are currently many commercially-available second-order solvers, robotics literature recently focused on efficient implementations and improvements over these solvers for real-time robotic applications. However, most often, these implementations stay problem-specific and are not easy to access or implement, or do not exploit the geometric aspect of the robotics problems. In this work, we propose to solve these problems using a fast, easy-to-implement first-order method that fully exploits the geometric constraints via Euclidean projections, called Augmented Lagrangian Spectral Projected Gradient Descent (ALSPG). We show that 1. using projections instead of full constraints and gradients improves the performance of the solver and 2. ALSPG stays competitive to the standard second-order methods such as iLQR in the unconstrained case. We showcase these results with IK and motion planning problems on simulated examples and with an MPC problem on a 7-axis manipulator experiment.
Demonstration-guided Optimal Control for Long-term Non-prehensile Planar Manipulation
Dec 24, 2022



Long-term non-prehensile planar manipulation is a challenging task for robot planning and feedback control. It is characterized by underactuation, hybrid control, and contact uncertainty. One main difficulty is to determine contact points and directions, which involves joint logic and geometrical reasoning in the modes of the dynamics model. To tackle this issue, we propose a demonstration-guided hierarchical optimization framework to achieve offline task and motion planning (TAMP). Our work extends the formulation of the dynamics model of the pusher-slider system to include separation mode with face switching cases, and solves a warm-started TAMP problem by exploiting human demonstrations. We show that our approach can cope well with the local minima problems currently present in the state-of-the-art solvers and determine a valid solution to the task. We validate our results in simulation and demonstrate its applicability on a pusher-slider system with real Franka Emika robot in the presence of external disturbances.
Reactive Anticipatory Robot Skills with Memory
Sep 23, 2022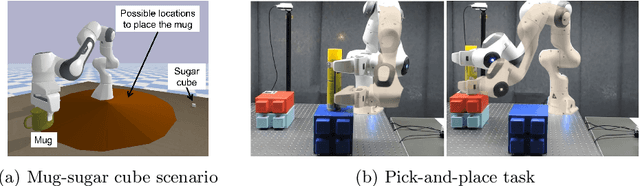
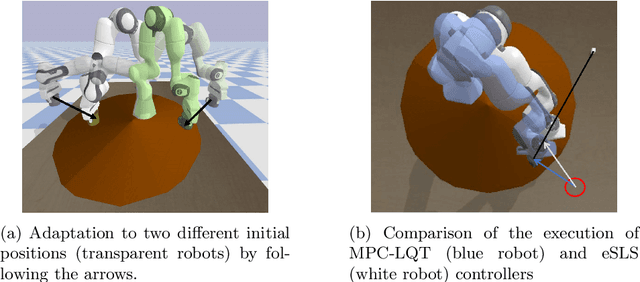
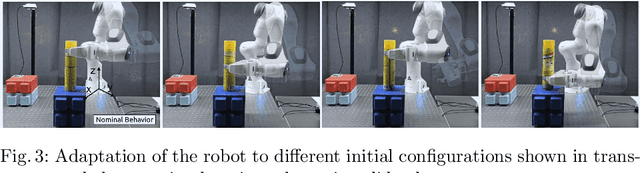
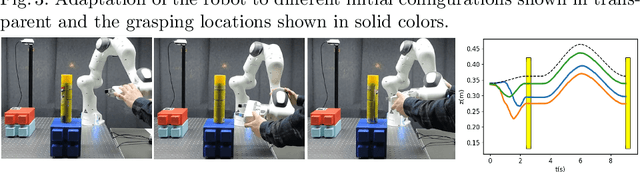
Optimal control in robotics has been increasingly popular in recent years and has been applied in many applications involving complex dynamical systems. Closed-loop optimal control strategies include model predictive control (MPC) and time-varying linear controllers optimized through iLQR. However, such feedback controllers rely on the information of the current state, limiting the range of robotic applications where the robot needs to remember what it has done before to act and plan accordingly. The recently proposed system level synthesis (SLS) framework circumvents this limitation via a richer controller structure with memory. In this work, we propose to optimally design reactive anticipatory robot skills with memory by extending SLS to tracking problems involving nonlinear systems and nonquadratic cost functions. We showcase our method with two scenarios exploiting task precisions and object affordances in pick-and-place tasks in a simulated and a real environment with a 7-axis Franka Emika robot.
Online and Offline Robot Programming via Augmented Reality Workspaces
Jul 05, 2021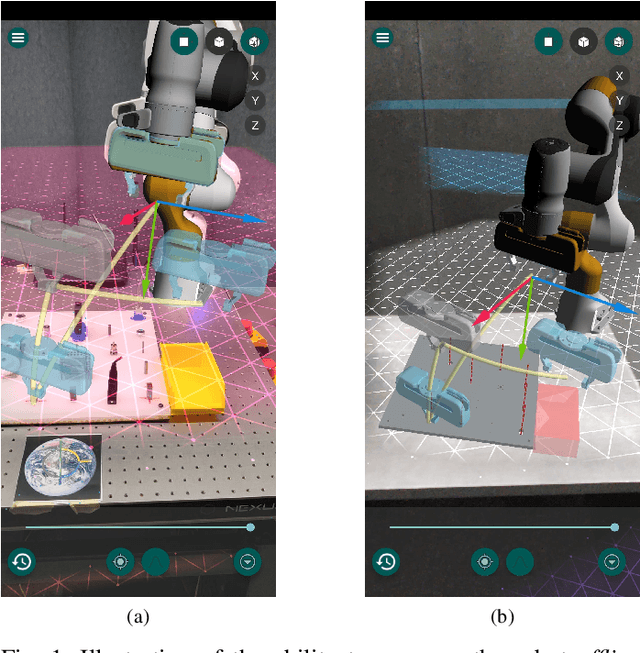
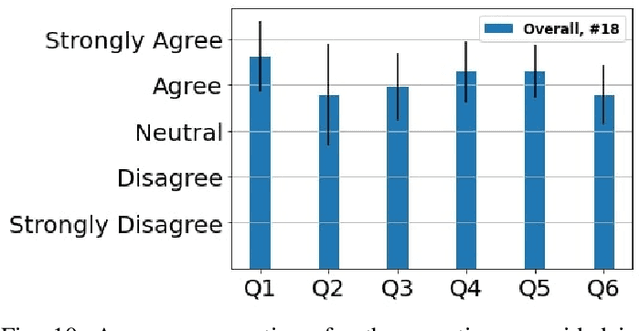
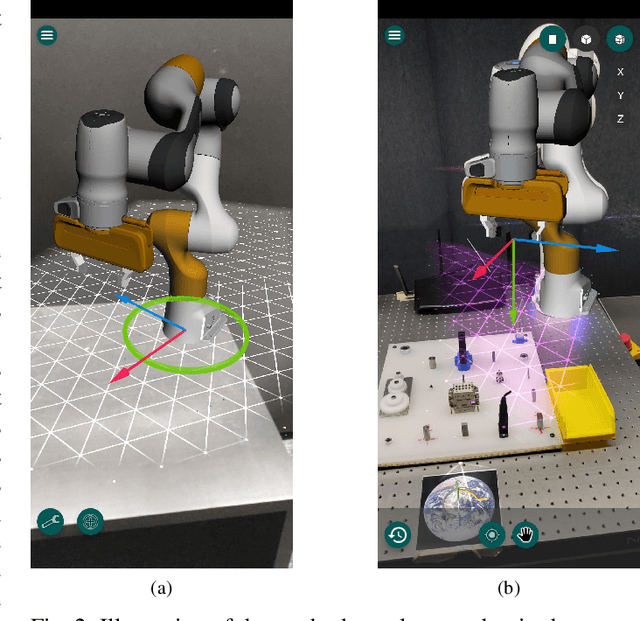
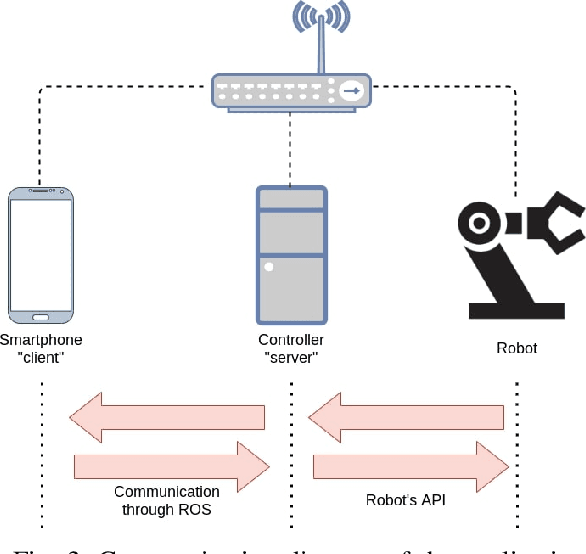
Robot programming methods for industrial robots are time consuming and often require operators to have knowledge in robotics and programming. To reduce costs associated with reprogramming, various interfaces using augmented reality have recently been proposed to provide users with more intuitive means of controlling robots in real-time and programming them without having to code. However, most solutions require the operator to be close to the real robot's workspace which implies either removing it from the production line or shutting down the whole production line due to safety hazards. We propose a novel augmented reality interface providing the users with the ability to model a virtual representation of a workspace which can be saved and reused to program new tasks or adapt old ones without having to be co-located with the real robot. Similar to previous interfaces, the operators then have the ability to program robot tasks or control the robot in real-time by manipulating a virtual robot. We evaluate the intuitiveness and usability of the proposed interface with a user study where 18 participants programmed a robot manipulator for a disassembly task.
Generative adversarial training of product of policies for robust and adaptive movement primitives
Nov 06, 2020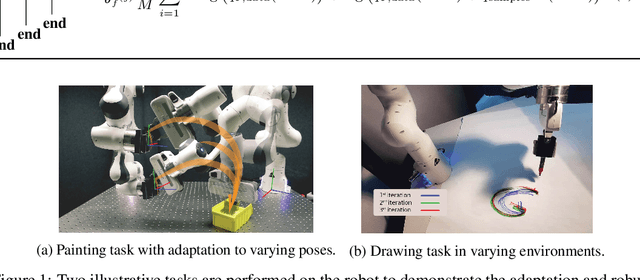
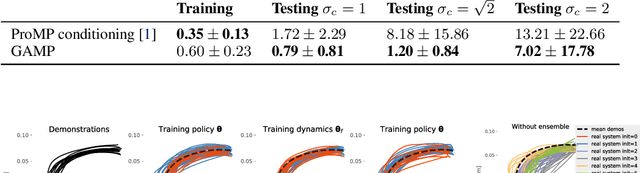
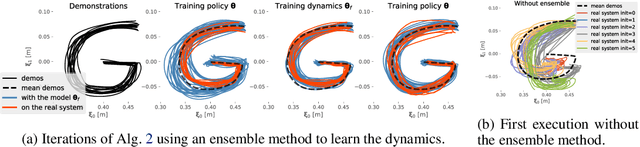
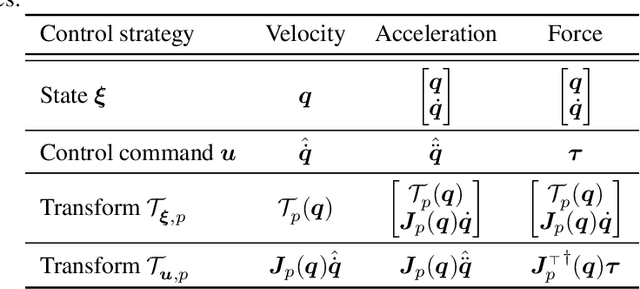
In learning from demonstrations, many generative models of trajectories make simplifying assumptions of independence. Correctness is sacrificed in the name of tractability and speed of the learning phase. The ignored dependencies, which often are the kinematic and dynamic constraints of the system, are then only restored when synthesizing the motion, which introduces possibly heavy distortions. In this work, we propose to use those approximate trajectory distributions as close-to-optimal discriminators in the popular generative adversarial framework to stabilize and accelerate the learning procedure. The two problems of adaptability and robustness are addressed with our method. In order to adapt the motions to varying contexts, we propose to use a product of Gaussian policies defined in several parametrized task spaces. Robustness to perturbations and varying dynamics is ensured with the use of stochastic gradient descent and ensemble methods to learn the stochastic dynamics. Two experiments are performed on a 7-DoF manipulator to validate the approach.
Active Improvement of Control Policies with Bayesian Gaussian Mixture Model
Aug 06, 2020
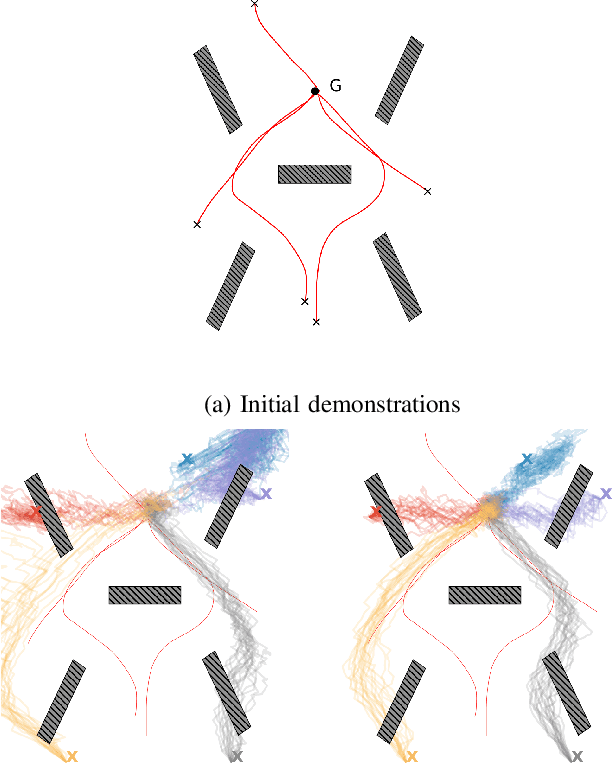

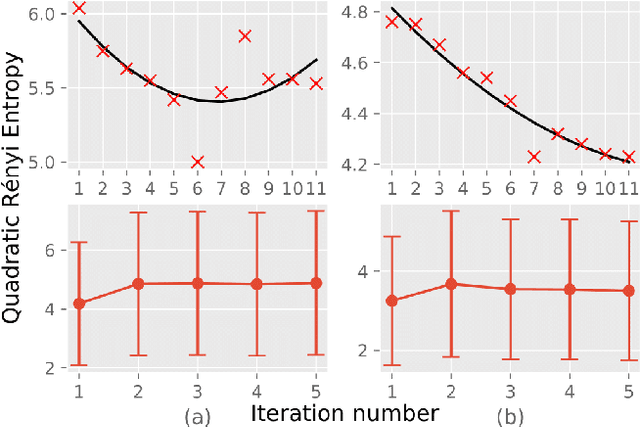
Learning from demonstration (LfD) is an intuitive framework allowing non-expert users to easily (re-)program robots. However, the quality and quantity of demonstrations have a great influence on the generalization performances of LfD approaches. In this paper, we introduce a novel active learning framework in order to improve the generalization capabilities of control policies. The proposed approach is based on the epistemic uncertainties of Bayesian Gaussian mixture models (BGMMs). We determine the new query point location by optimizing a closed-form information-density cost based on the quadratic R\'enyi entropy. Furthermore, to better represent uncertain regions and to avoid local optima problem, we propose to approximate the active learning cost with a Gaussian mixture model (GMM). We demonstrate our active learning framework in the context of a reaching task in a cluttered environment with an illustrative toy example and a real experiment with a Panda robot.
Nullspace Structure in Model Predictive Control
May 23, 2019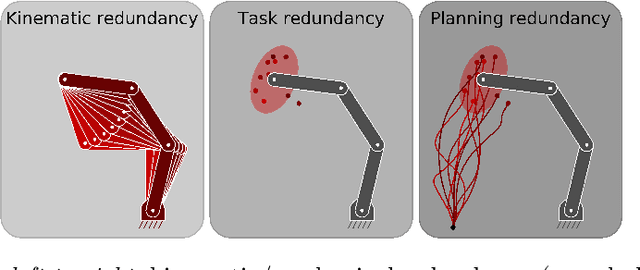
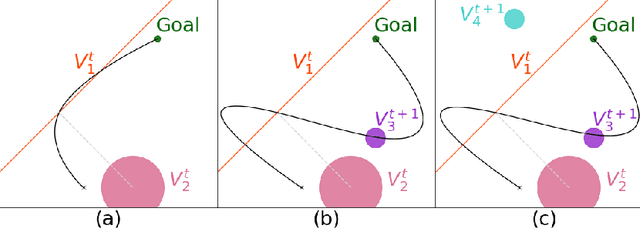
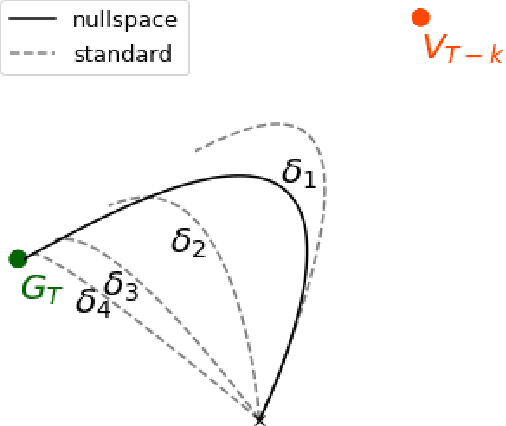
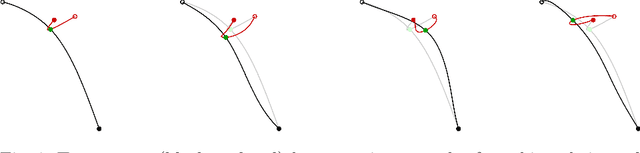
Robotic tasks can be accomplished by exploiting different forms of redundancies. This work focuses on planning redundancy within Model Predictive Control (MPC) in which several paths can be considered within the MPC time horizon. We present the nullspace structure in MPC with a quadratic approximation of the cost and a linearization of the dynamics. We exploit the low rank structure of the precision matrices used in MPC (encapsulating spatiotemporal information) to perform hierarchical task planning, and show how nullspace computation can be treated as a fusion problem (computed with a product of Gaussian experts). We illustrate the approach using proof-of-concept examples with point mass objects and simulated robotics applications.