 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLet the Dynamics Flow: Stable Flow Matching Dynamical Systems
Jun 02, 2026Flow matching has recently emerged as a powerful approach for imitation learning, enabling scalable, expressive, and multimodal motion policies. However, incorporating formal stability guarantees into these generative models, a prerequisite to ensure safe and generalizable robot behaviors, remains a significant challenge. While modeling robot motions as dynamical systems allows for such stability-based inductive biases, existing frameworks struggle to capture the rich action distributions inherent in complex robotic tasks. This paper introduces Stable Flow Matching Dynamical Systems (SFMDS), a novel framework that bridges the gap between high-capacity generative modeling and formal Lyapunov stability guarantees. SFMDS parametrizes dynamical systems via flow matching while simultaneously constraining the model to a family of stable solutions. We propose two variants: a soft constraint based on a penalty term, and a hard structural constraint embedded directly in the model architecture. We further extend both formulations to Lie groups. Experiments on benchmark datasets, in simulation, and on a humanoid robot show that SFMDS learns stable, scalable, and multimodal dynamical systems in low- and high-dimensional state spaces, enabling safe and expressive robot motion generation.
Symmetries Here and There, Combined Everywhere: Cross-space Symmetry Compositions in Robotics
May 21, 2026Robots exhibit a rich variety of symmetries arising from their mechanical structure and the properties of their tasks. Although many robotics problems exhibit several symmetries simultaneously, existing approaches typically treat them in isolation, failing to exploit their combined potential. This paper introduces cross-space symmetry compositions, a framework for learning robot policies that are jointly equivariant to multiple symmetries across configuration and task spaces. Leveraging the differential-geometric structure of the forward kinematics map, we both descend symmetries from configuration to task space and lift symmetries from task to configuration space, enabling their composition within a unified representation space. We validate our framework on simulated and real-world experiments on a dual-arm robot, demonstrating that jointly leveraging multiple symmetries yields improved generalization.
Information Theoretic Bayesian Optimization over the Probability Simplex
Mar 10, 2026Bayesian optimization is a data-efficient technique that has been shown to be extremely powerful to optimize expensive, black-box, and possibly noisy objective functions. Many applications involve optimizing probabilities and mixtures which naturally belong to the probability simplex, a constrained non-Euclidean domain defined by non-negative entries summing to one. This paper introduces $α$-GaBO, a novel family of Bayesian optimization algorithms over the probability simplex. Our approach is grounded in information geometry, a branch of Riemannian geometry which endows the simplex with a Riemannian metric and a class of connections. Based on information geometry theory, we construct Matérn kernels that reflect the geometry of the probability simplex, as well as a one-parameter family of geometric optimizers for the acquisition function. We validate our method on benchmark functions and on a variety of real-world applications including mixtures of components, mixtures of classifiers, and a robotic control task, showing its increased performance compared to constrained Euclidean approaches.
Reduced-order Control and Geometric Structure of Learned Lagrangian Latent Dynamics
Feb 09, 2026Model-based controllers can offer strong guarantees on stability and convergence by relying on physically accurate dynamic models. However, these are rarely available for high-dimensional mechanical systems such as deformable objects or soft robots. While neural architectures can learn to approximate complex dynamics, they are either limited to low-dimensional systems or provide only limited formal control guarantees due to a lack of embedded physical structure. This paper introduces a latent control framework based on learned structure-preserving reduced-order dynamics for high-dimensional Lagrangian systems. We derive a reduced tracking law for fully actuated systems and adopt a Riemannian perspective on projection-based model-order reduction to study the resulting latent and projected closed-loop dynamics. By quantifying the sources of modeling error, we derive interpretable conditions for stability and convergence. We extend the proposed controller and analysis to underactuated systems by introducing learned actuation patterns. Experimental results on simulated and real-world systems validate our theoretical investigation and the accuracy of our controllers.
Towards Safe Imitation Learning via Potential Field-Guided Flow Matching
Aug 12, 2025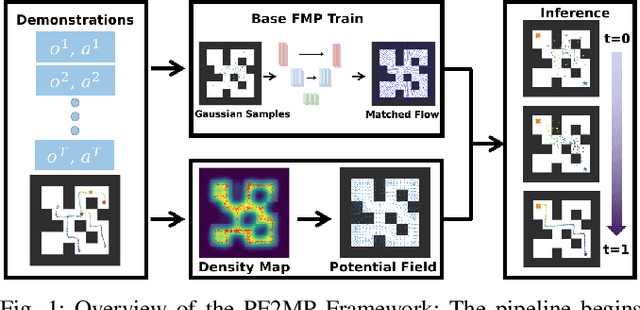
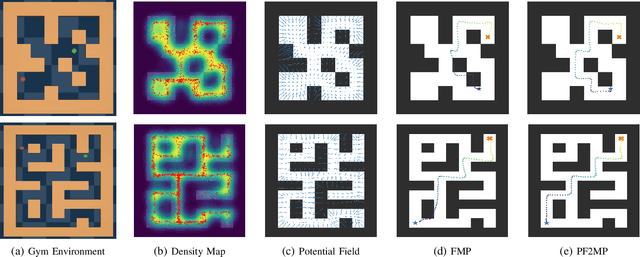
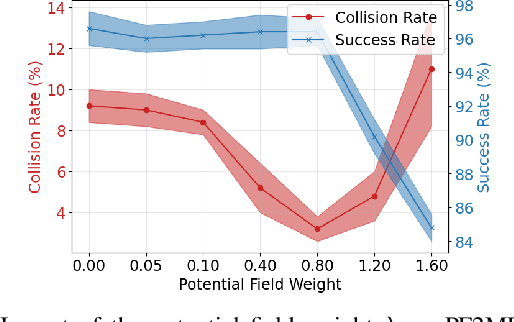

Deep generative models, particularly diffusion and flow matching models, have recently shown remarkable potential in learning complex policies through imitation learning. However, the safety of generated motions remains overlooked, particularly in complex environments with inherent obstacles. In this work, we address this critical gap by proposing Potential Field-Guided Flow Matching Policy (PF2MP), a novel approach that simultaneously learns task policies and extracts obstacle-related information, represented as a potential field, from the same set of successful demonstrations. During inference, PF2MP modulates the flow matching vector field via the learned potential field, enabling safe motion generation. By leveraging these complementary fields, our approach achieves improved safety without compromising task success across diverse environments, such as navigation tasks and robotic manipulation scenarios. We evaluate PF2MP in both simulation and real-world settings, demonstrating its effectiveness in task space and joint space control. Experimental results demonstrate that PF2MP enhances safety, achieving a significant reduction of collisions compared to baseline policies. This work paves the way for safer motion generation in unstructured and obstaclerich environments.
Riemann$^2$: Learning Riemannian Submanifolds from Riemannian Data
Mar 07, 2025Latent variable models are powerful tools for learning low-dimensional manifolds from high-dimensional data. However, when dealing with constrained data such as unit-norm vectors or symmetric positive-definite matrices, existing approaches ignore the underlying geometric constraints or fail to provide meaningful metrics in the latent space. To address these limitations, we propose to learn Riemannian latent representations of such geometric data. To do so, we estimate the pullback metric induced by a Wrapped Gaussian Process Latent Variable Model, which explicitly accounts for the data geometry. This enables us to define geometry-aware notions of distance and shortest paths in the latent space, while ensuring that our model only assigns probability mass to the data manifold. This generalizes previous work and allows us to handle complex tasks in various domains, including robot motion synthesis and analysis of brain connectomes.
Fast and Robust Visuomotor Riemannian Flow Matching Policy
Dec 14, 2024



Diffusion-based visuomotor policies excel at learning complex robotic tasks by effectively combining visual data with high-dimensional, multi-modal action distributions. However, diffusion models often suffer from slow inference due to costly denoising processes or require complex sequential training arising from recent distilling approaches. This paper introduces Riemannian Flow Matching Policy (RFMP), a model that inherits the easy training and fast inference capabilities of flow matching (FM). Moreover, RFMP inherently incorporates geometric constraints commonly found in realistic robotic applications, as the robot state resides on a Riemannian manifold. To enhance the robustness of RFMP, we propose Stable RFMP (SRFMP), which leverages LaSalle's invariance principle to equip the dynamics of FM with stability to the support of a target Riemannian distribution. Rigorous evaluation on eight simulated and real-world tasks show that RFMP successfully learns and synthesizes complex sensorimotor policies on Euclidean and Riemannian spaces with efficient training and inference phases, outperforming Diffusion Policies while remaining competitive with Consistency Policies.
On Probabilistic Pullback Metrics on Latent Hyperbolic Manifolds
Oct 28, 2024Gaussian Process Latent Variable Models (GPLVMs) have proven effective in capturing complex, high-dimensional data through lower-dimensional representations. Recent advances show that using Riemannian manifolds as latent spaces provides more flexibility to learn higher quality embeddings. This paper focuses on the hyperbolic manifold, a particularly suitable choice for modeling hierarchical relationships. While previous approaches relied on hyperbolic geodesics for interpolating the latent space, this often results in paths crossing low-data regions, leading to highly uncertain predictions. Instead, we propose augmenting the hyperbolic metric with a pullback metric to account for distortions introduced by the GPLVM's nonlinear mapping. Through various experiments, we demonstrate that geodesics on the pullback metric not only respect the geometry of the hyperbolic latent space but also align with the underlying data distribution, significantly reducing uncertainty in predictions.
A Riemannian Framework for Learning Reduced-order Lagrangian Dynamics
Oct 24, 2024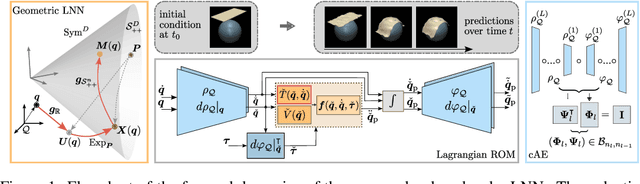
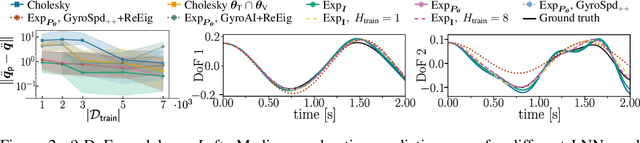
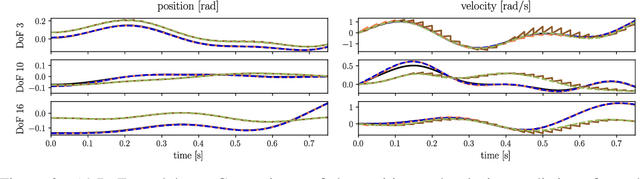
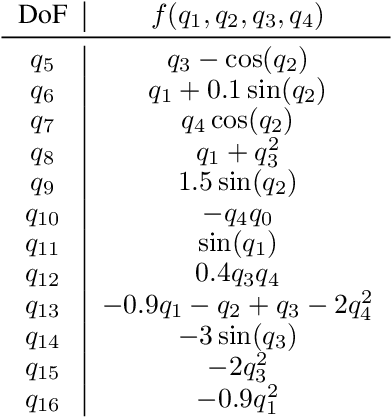
By incorporating physical consistency as inductive bias, deep neural networks display increased generalization capabilities and data efficiency in learning nonlinear dynamic models. However, the complexity of these models generally increases with the system dimensionality, requiring larger datasets, more complex deep networks, and significant computational effort. We propose a novel geometric network architecture to learn physically-consistent reduced-order dynamic parameters that accurately describe the original high-dimensional system behavior. This is achieved by building on recent advances in model-order reduction and by adopting a Riemannian perspective to jointly learn a structure-preserving latent space and the associated low-dimensional dynamics. Our approach enables accurate long-term predictions of the high-dimensional dynamics of rigid and deformable systems with increased data efficiency by inferring interpretable and physically plausible reduced Lagrangian models.
The GeometricKernels Package: Heat and Matérn Kernels for Geometric Learning on Manifolds, Meshes, and Graphs
Jul 10, 2024
Kernels are a fundamental technical primitive in machine learning. In recent years, kernel-based methods such as Gaussian processes are becoming increasingly important in applications where quantifying uncertainty is of key interest. In settings that involve structured data defined on graphs, meshes, manifolds, or other related spaces, defining kernels with good uncertainty-quantification behavior, and computing their value numerically, is less straightforward than in the Euclidean setting. To address this difficulty, we present GeometricKernels, a software package which implements the geometric analogs of classical Euclidean squared exponential - also known as heat - and Mat\'ern kernels, which are widely-used in settings where uncertainty is of key interest. As a byproduct, we obtain the ability to compute Fourier-feature-type expansions, which are widely used in their own right, on a wide set of geometric spaces. Our implementation supports automatic differentiation in every major current framework simultaneously via a backend-agnostic design. In this companion paper to the package and its documentation, we outline the capabilities of the package and present an illustrated example of its interface. We also include a brief overview of the theory the package is built upon and provide some historic context in the appendix.