 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Quadratic Programming -- Pullback Bundle Dynamical Systems Control
Jun 03, 2024Dynamical System (DS)-based closed-loop control is a simple and effective way to generate reactive motion policies that well generalize to the robotic workspace, while retaining stability guarantees. Lately the formalism has been expanded in order to handle arbitrary geometry curved spaces, namely manifolds, beyond the standard flat Euclidean space. Despite the many different ways proposed to handle DS on manifolds, it is still unclear how to apply such structures on real robotic systems. In this preliminary study, we propose a way to combine modern optimal control techniques with a geometry-based formulation of DS. The advantage of such approach is two fold. First, it yields a torque-based control for compliant and adaptive motions; second, it generates dynamical systems consistent with the controlled system's dynamics. The salient point of the approach is that the complexity of designing a proper constrained-based optimal control problem, to ensure that dynamics move on a manifold while avoiding obstacles or self-collisions, is "outsourced" to the geometric DS. Constraints are implicitly embedded into the structure of the space in which the DS evolves. The optimal control, on the other hand, provides a torque-based control interface, and ensures dynamical consistency of the generated output. The whole can be achieved with minimal computational overhead since most of the computational complexity is delegated to the closed-form geometric DS.
Learning Dynamical Systems Encoding Non-Linearity within Space Curvature
Mar 18, 2024

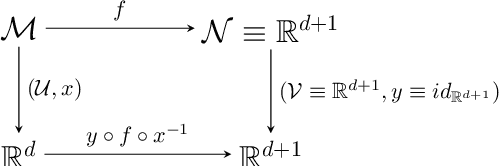
Dynamical Systems (DS) are an effective and powerful means of shaping high-level policies for robotics control. They provide robust and reactive control while ensuring the stability of the driving vector field. The increasing complexity of real-world scenarios necessitates DS with a higher degree of non-linearity, along with the ability to adapt to potential changes in environmental conditions, such as obstacles. Current learning strategies for DSs often involve a trade-off, sacrificing either stability guarantees or offline computational efficiency in order to enhance the capabilities of the learned DS. Online local adaptation to environmental changes is either not taken into consideration or treated as a separate problem. In this paper, our objective is to introduce a method that enhances the complexity of the learned DS without compromising efficiency during training or stability guarantees. Furthermore, we aim to provide a unified approach for seamlessly integrating the initially learned DS's non-linearity with any local non-linearities that may arise due to changes in the environment. We propose a geometrical approach to learn asymptotically stable non-linear DS for robotics control. Each DS is modeled as a harmonic damped oscillator on a latent manifold. By learning the manifold's Euclidean embedded representation, our approach encodes the non-linearity of the DS within the curvature of the space. Having an explicit embedded representation of the manifold allows us to showcase obstacle avoidance by directly inducing local deformations of the space. We demonstrate the effectiveness of our methodology through two scenarios: first, the 2D learning of synthetic vector fields, and second, the learning of 3D robotic end-effector motions in real-world settings.
Transfer Learning in Robotics: An Upcoming Breakthrough? A Review of Promises and Challenges
Nov 29, 2023Transfer learning is a conceptually-enticing paradigm in pursuit of truly intelligent embodied agents. The core concept -- reusing prior knowledge to learn in and from novel situations -- is successfully leveraged by humans to handle novel situations. In recent years, transfer learning has received renewed interest from the community from different perspectives, including imitation learning, domain adaptation, and transfer of experience from simulation to the real world, among others. In this paper, we unify the concept of transfer learning in robotics and provide the first taxonomy of its kind considering the key concepts of robot, task, and environment. Through a review of the promises and challenges in the field, we identify the need of transferring at different abstraction levels, the need of quantifying the transfer gap and the quality of transfer, as well as the dangers of negative transfer. Via this position paper, we hope to channel the effort of the community towards the most significant roadblocks to realize the full potential of transfer learning in robotics.
Implicit Manifold Gaussian Process Regression
Oct 30, 2023



Gaussian process regression is widely used because of its ability to provide well-calibrated uncertainty estimates and handle small or sparse datasets. However, it struggles with high-dimensional data. One possible way to scale this technique to higher dimensions is to leverage the implicit low-dimensional manifold upon which the data actually lies, as postulated by the manifold hypothesis. Prior work ordinarily requires the manifold structure to be explicitly provided though, i.e. given by a mesh or be known to be one of the well-known manifolds like the sphere. In contrast, in this paper we propose a Gaussian process regression technique capable of inferring implicit structure directly from data (labeled and unlabeled) in a fully differentiable way. For the resulting model, we discuss its convergence to the Mat\'ern Gaussian process on the assumed manifold. Our technique scales up to hundreds of thousands of data points, and may improve the predictive performance and calibration of the standard Gaussian process regression in high-dimensional~settings.
Linearization and Identification of Multiple-Attractors Dynamical System through Laplacian Eigenmaps
Feb 18, 2022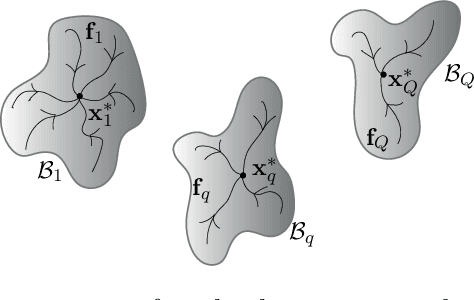

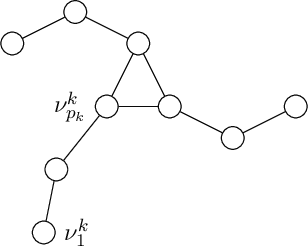

Dynamical Systems (DS) are fundamental to the modeling and understanding of time evolving phenomena, and find application in physics, biology and control. As determining an analytical description of the dynamics is often difficult, data-driven approaches are preferred for identifying and controlling nonlinear DS with multiple equilibrium points. Identification of such DS has been treated largely as a supervised learning problem. Instead, we focus on a unsupervised learning scenario where we know neither the number nor the type of dynamics. We propose a Graph-based spectral clustering method that takes advantage of a velocity-augmented kernel to connect data-points belonging to the same dynamics, while preserving the natural temporal evolution. We study the eigenvectors and eigenvalues of the Graph Laplacian and show that they form a set of orthogonal embedding spaces, one for each sub-dynamics. We prove that there always exist a set of 2-dimensional embedding spaces in which the sub-dynamics are linear, and n-dimensional embedding where they are quasi-linear. We compare the clustering performance of our algorithm to Kernel K-Means, Spectral Clustering and Gaussian Mixtures and show that, even when these algorithms are provided with the true number of sub-dynamics, they fail to cluster them correctly. We learn a diffeomorphism from the Laplacian embedding space to the original space and show that the Laplacian embedding leads to good reconstruction accuracy and a faster training time through an exponential decaying loss, compared to the state of the art diffeomorphism-based approaches.