 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmnipresent Yet Overlooked: Heat Kernels in Combinatorial Bayesian Optimization
Oct 30, 2025Bayesian Optimization (BO) has the potential to solve various combinatorial tasks, ranging from materials science to neural architecture search. However, BO requires specialized kernels to effectively model combinatorial domains. Recent efforts have introduced several combinatorial kernels, but the relationships among them are not well understood. To bridge this gap, we develop a unifying framework based on heat kernels, which we derive in a systematic way and express as simple closed-form expressions. Using this framework, we prove that many successful combinatorial kernels are either related or equivalent to heat kernels, and validate this theoretical claim in our experiments. Moreover, our analysis confirms and extends the results presented in Bounce: certain algorithms' performance decreases substantially when the unknown optima of the function do not have a certain structure. In contrast, heat kernels are not sensitive to the location of the optima. Lastly, we show that a fast and simple pipeline, relying on heat kernels, is able to achieve state-of-the-art results, matching or even outperforming certain slow or complex algorithms.
Residual Deep Gaussian Processes on Manifolds
Oct 31, 2024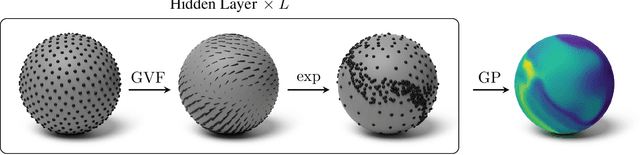

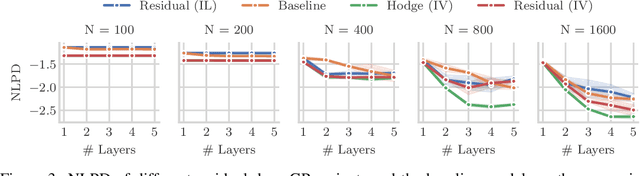

We propose practical deep Gaussian process models on Riemannian manifolds, similar in spirit to residual neural networks. With manifold-to-manifold hidden layers and an arbitrary last layer, they can model manifold- and scalar-valued functions, as well as vector fields. We target data inherently supported on manifolds, which is too complex for shallow Gaussian processes thereon. For example, while the latter perform well on high-altitude wind data, they struggle with the more intricate, nonstationary patterns at low altitudes. Our models significantly improve performance in these settings, enhancing prediction quality and uncertainty calibration, and remain robust to overfitting, reverting to shallow models when additional complexity is unneeded. We further showcase our models on Bayesian optimisation problems on manifolds, using stylised examples motivated by robotics, and obtain substantial improvements in later stages of the optimisation process. Finally, we show our models to have potential for speeding up inference for non-manifold data, when, and if, it can be mapped to a proxy manifold well enough.
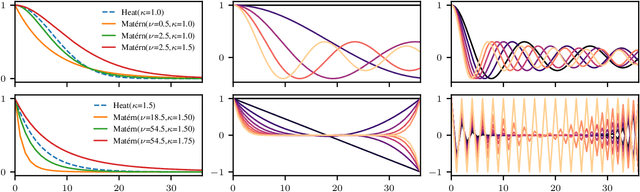
The GeometricKernels Package: Heat and Matérn Kernels for Geometric Learning on Manifolds, Meshes, and Graphs
Jul 10, 2024
Kernels are a fundamental technical primitive in machine learning. In recent years, kernel-based methods such as Gaussian processes are becoming increasingly important in applications where quantifying uncertainty is of key interest. In settings that involve structured data defined on graphs, meshes, manifolds, or other related spaces, defining kernels with good uncertainty-quantification behavior, and computing their value numerically, is less straightforward than in the Euclidean setting. To address this difficulty, we present GeometricKernels, a software package which implements the geometric analogs of classical Euclidean squared exponential - also known as heat - and Mat\'ern kernels, which are widely-used in settings where uncertainty is of key interest. As a byproduct, we obtain the ability to compute Fourier-feature-type expansions, which are widely used in their own right, on a wide set of geometric spaces. Our implementation supports automatic differentiation in every major current framework simultaneously via a backend-agnostic design. In this companion paper to the package and its documentation, we outline the capabilities of the package and present an illustrated example of its interface. We also include a brief overview of the theory the package is built upon and provide some historic context in the appendix.
Hodge-Compositional Edge Gaussian Processes
Oct 31, 2023We propose principled Gaussian processes (GPs) for modeling functions defined over the edge set of a simplicial 2-complex, a structure similar to a graph in which edges may form triangular faces. This approach is intended for learning flow-type data on networks where edge flows can be characterized by the discrete divergence and curl. Drawing upon the Hodge decomposition, we first develop classes of divergence-free and curl-free edge GPs, suitable for various applications. We then combine them to create \emph{Hodge-compositional edge GPs} that are expressive enough to represent any edge function. These GPs facilitate direct and independent learning for the different Hodge components of edge functions, enabling us to capture their relevance during hyperparameter optimization. To highlight their practical potential, we apply them for flow data inference in currency exchange, ocean flows and water supply networks, comparing them to alternative models.
Implicit Manifold Gaussian Process Regression
Oct 30, 2023



Gaussian process regression is widely used because of its ability to provide well-calibrated uncertainty estimates and handle small or sparse datasets. However, it struggles with high-dimensional data. One possible way to scale this technique to higher dimensions is to leverage the implicit low-dimensional manifold upon which the data actually lies, as postulated by the manifold hypothesis. Prior work ordinarily requires the manifold structure to be explicitly provided though, i.e. given by a mesh or be known to be one of the well-known manifolds like the sphere. In contrast, in this paper we propose a Gaussian process regression technique capable of inferring implicit structure directly from data (labeled and unlabeled) in a fully differentiable way. For the resulting model, we discuss its convergence to the Mat\'ern Gaussian process on the assumed manifold. Our technique scales up to hundreds of thousands of data points, and may improve the predictive performance and calibration of the standard Gaussian process regression in high-dimensional~settings.
Intrinsic Gaussian Vector Fields on Manifolds
Oct 28, 2023



Various applications ranging from robotics to climate science require modeling signals on non-Euclidean domains, such as the sphere. Gaussian process models on manifolds have recently been proposed for such tasks, in particular when uncertainty quantification is needed. In the manifold setting, vector-valued signals can behave very differently from scalar-valued ones, with much of the progress so far focused on modeling the latter. The former, however, are crucial for many applications, such as modeling wind speeds or force fields of unknown dynamical systems. In this paper, we propose novel Gaussian process models for vector-valued signals on manifolds that are intrinsically defined and account for the geometry of the space in consideration. We provide computational primitives needed to deploy the resulting Hodge-Mat\'ern Gaussian vector fields on the two-dimensional sphere and the hypertori. Further, we highlight two generalization directions: discrete two-dimensional meshes and "ideal" manifolds like hyperspheres, Lie groups, and homogeneous spaces. Finally, we show that our Gaussian vector fields constitute considerably more refined inductive biases than the extrinsic fields proposed before.
Posterior Contraction Rates for Matérn Gaussian Processes on Riemannian Manifolds
Sep 22, 2023


Gaussian processes are used in many machine learning applications that rely on uncertainty quantification. Recently, computational tools for working with these models in geometric settings, such as when inputs lie on a Riemannian manifold, have been developed. This raises the question: can these intrinsic models be shown theoretically to lead to better performance, compared to simply embedding all relevant quantities into $\mathbb{R}^d$ and using the restriction of an ordinary Euclidean Gaussian process? To study this, we prove optimal contraction rates for intrinsic Mat\'ern Gaussian processes defined on compact Riemannian manifolds. We also prove analogous rates for extrinsic processes using trace and extension theorems between manifold and ambient Sobolev spaces: somewhat surprisingly, the rates obtained turn out to coincide with those of the intrinsic processes, provided that their smoothness parameters are matched appropriately. We illustrate these rates empirically on a number of examples, which, mirroring prior work, show that intrinsic processes can achieve better performance in practice. Therefore, our work shows that finer-grained analyses are needed to distinguish between different levels of data-efficiency of geometric Gaussian processes, particularly in settings which involve small data set sizes and non-asymptotic behavior.
Stationary Kernels and Gaussian Processes on Lie Groups and their Homogeneous Spaces II: non-compact symmetric spaces
Jan 30, 2023



Gaussian processes are arguably the most important class of spatiotemporal models within machine learning. They encode prior information about the modeled function and can be used for exact or approximate Bayesian learning. In many applications, particularly in physical sciences and engineering, but also in areas such as geostatistics and neuroscience, invariance to symmetries is one of the most fundamental forms of prior information one can consider. The invariance of a Gaussian process' covariance to such symmetries gives rise to the most natural generalization of the concept of stationarity to such spaces. In this work, we develop constructive and practical techniques for building stationary Gaussian processes on a very large class of non-Euclidean spaces arising in the context of symmetries. Our techniques make it possible to (i) calculate covariance kernels and (ii) sample from prior and posterior Gaussian processes defined on such spaces, both in a practical manner. This work is split into two parts, each involving different technical considerations: part I studies compact spaces, while part II studies non-compact spaces possessing certain structure. Our contributions make the non-Euclidean Gaussian process models we study compatible with well-understood computational techniques available in standard Gaussian process software packages, thereby making them accessible to practitioners.
On power sum kernels on symmetric groups
Nov 10, 2022In this note, we introduce a family of "power sum" kernels and the corresponding Gaussian processes on symmetric groups $\mathrm{S}_n$. Such processes are bi-invariant: the action of $\mathrm{S}_n$ on itself from both sides does not change their finite-dimensional distributions. We show that the values of power sum kernels can be efficiently calculated, and we also propose a method enabling approximate sampling of the corresponding Gaussian processes with polynomial computational complexity. By doing this we provide the tools that are required to use the introduced family of kernels and the respective processes for statistical modeling and machine learning.
Isotropic Gaussian Processes on Finite Spaces of Graphs
Nov 03, 2022
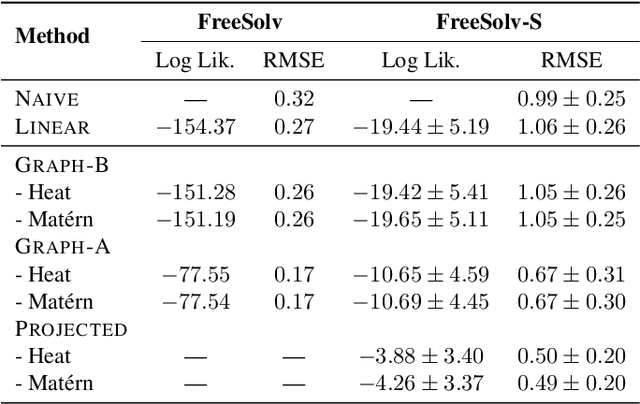
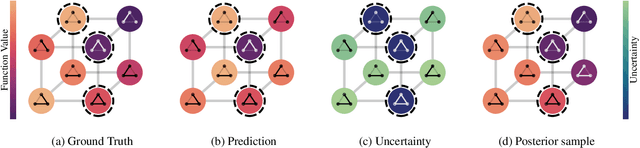
We propose a principled way to define Gaussian process priors on various sets of unweighted graphs: directed or undirected, with or without loops. We endow each of these sets with a geometric structure, inducing the notions of closeness and symmetries, by turning them into a vertex set of an appropriate metagraph. Building on this, we describe the class of priors that respect this structure and are analogous to the Euclidean isotropic processes, like squared exponential or Mat\'ern. We propose an efficient computational technique for the ostensibly intractable problem of evaluating these priors' kernels, making such Gaussian processes usable within the usual toolboxes and downstream applications. We go further to consider sets of equivalence classes of unweighted graphs and define the appropriate versions of priors thereon. We prove a hardness result, showing that in this case, exact kernel computation cannot be performed efficiently. However, we propose a simple Monte Carlo approximation for handling moderately sized cases. Inspired by applications in chemistry, we illustrate the proposed techniques on a real molecular property prediction task in the small data regime.