 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBringing robotics taxonomies to continuous domains via GPLVM on hyperbolic manifolds
Paper and Code
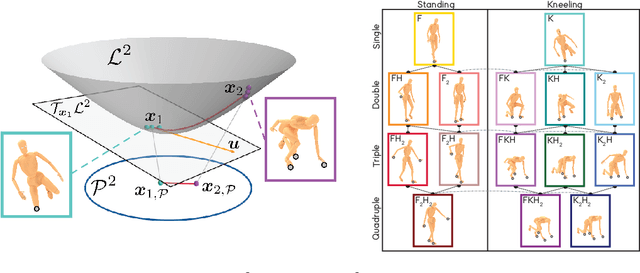
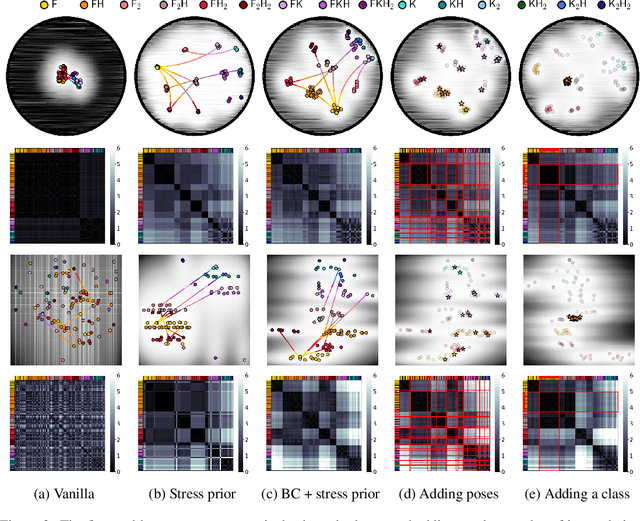
Robotic taxonomies have appeared as high-level hierarchical abstractions that classify how humans move and interact with their environment. They have proven useful to analyse grasps, manipulation skills, and whole-body support poses. Despite the efforts devoted to design their hierarchy and underlying categories, their use in application fields remains scarce. This may be attributed to the lack of computational models that fill the gap between the discrete hierarchical structure of the taxonomy and the high-dimensional heterogeneous data associated to its categories. To overcome this problem, we propose to model taxonomy data via hyperbolic embeddings that capture the associated hierarchical structure. To do so, we formulate a Gaussian process hyperbolic latent variable model and enforce the taxonomy structure through graph-based priors on the latent space and distance-preserving back constraints. We test our model on the whole-body support pose taxonomy to learn hyperbolic embeddings that comply with the original graph structure. We show that our model properly encodes unseen poses from existing or new taxonomy categories, it can be used to generate trajectories between the embeddings, and it outperforms its Euclidean counterparts.