 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransfer Learning in Robotics: An Upcoming Breakthrough? A Review of Promises and Challenges
Nov 29, 2023Transfer learning is a conceptually-enticing paradigm in pursuit of truly intelligent embodied agents. The core concept -- reusing prior knowledge to learn in and from novel situations -- is successfully leveraged by humans to handle novel situations. In recent years, transfer learning has received renewed interest from the community from different perspectives, including imitation learning, domain adaptation, and transfer of experience from simulation to the real world, among others. In this paper, we unify the concept of transfer learning in robotics and provide the first taxonomy of its kind considering the key concepts of robot, task, and environment. Through a review of the promises and challenges in the field, we identify the need of transferring at different abstraction levels, the need of quantifying the transfer gap and the quality of transfer, as well as the dangers of negative transfer. Via this position paper, we hope to channel the effort of the community towards the most significant roadblocks to realize the full potential of transfer learning in robotics.
A reconfigurable robot workcell for quick set-up of assembly processes
Apr 02, 2020
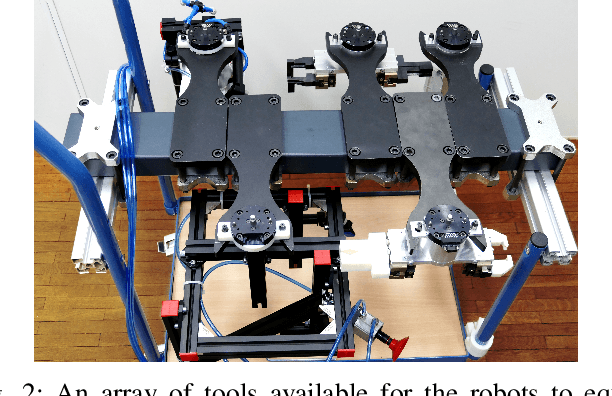
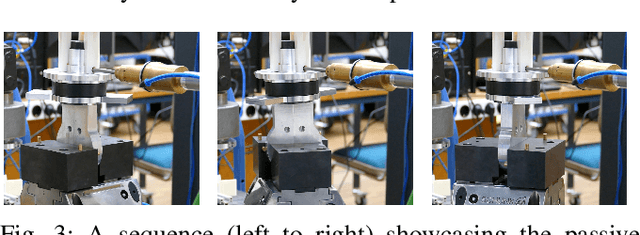

High volume production has been a prerequisite in order to invest into automation of the manufacturing process for decades. The high cost of setup and the inflexibility of classical automation meant that low batch productions, often present in Small and Medium-sized Enterprises (SMEs), were dismissed as potential end user of automation technologies. In this extended abstract we present the results of the ReconCell project whose objective was to develop a new type of highly reconfigurable robot workcell for fast set-up of automated assembly processes in SMEs. The high degree of reconfigurability was achieved by the developed reconfigurable hardware and the complementary reconfigurable software, while fast set-up was achieved with technologies for fast robot programming.
Learning Task-Specific Dynamics to Improve Whole-Body Control
Mar 08, 2018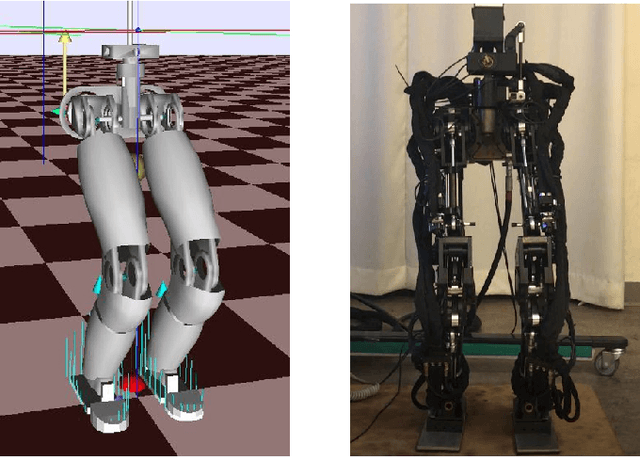
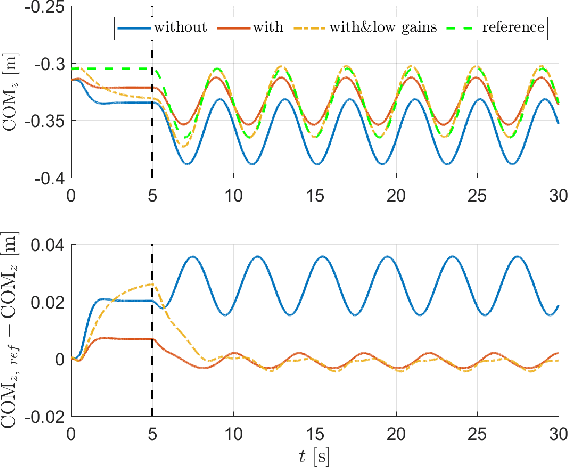
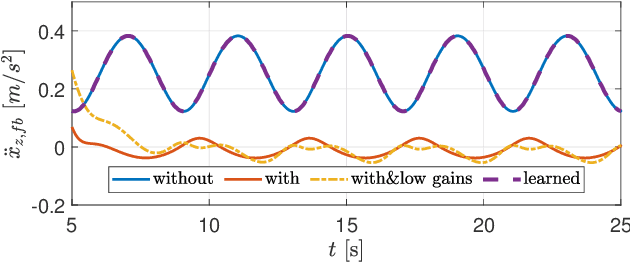
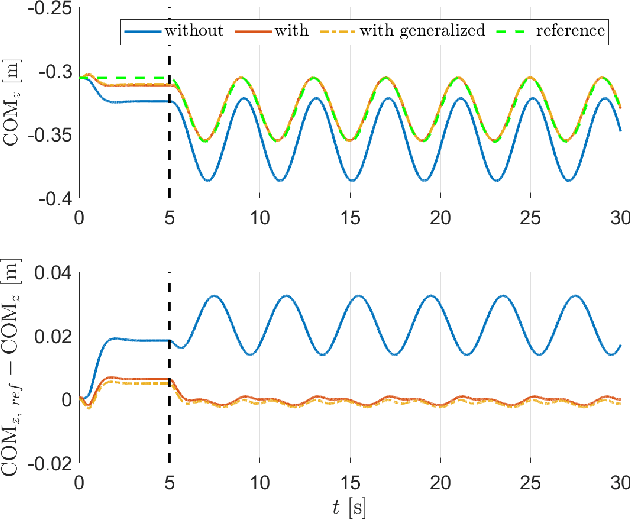
In task-based inverse dynamics control, reference accelerations used to follow a desired plan can be broken down into feedforward and feedback trajectories. The feedback term accounts for tracking errors that are caused from inaccurate dynamic models or external disturbances. On underactuated, free-floating robots, such as humanoids, high feedback terms can be used to improve tracking accuracy; however, this can lead to very stiff behavior or poor tracking accuracy due to limited control bandwidth. In this paper, we show how to reduce the required contribution of the feedback controller by incorporating learned task-space reference accelerations. Thus, we i) improve the execution of the given specific task, and ii) offer the means to reduce feedback gains, providing for greater compliance of the system. With a systematic approach we also reduce heuristic tuning of the model parameters and feedback gains, often present in real-world experiments. In contrast to learning task-specific joint-torques, which might produce a similar effect but can lead to poor generalization, our approach directly learns the task-space dynamics of the center of mass of a humanoid robot. Simulated and real-world results on the lower part of the Sarcos Hermes humanoid robot demonstrate the applicability of the approach.
Compliant Movement Primitives in a Bimanual Setting
Jul 14, 2017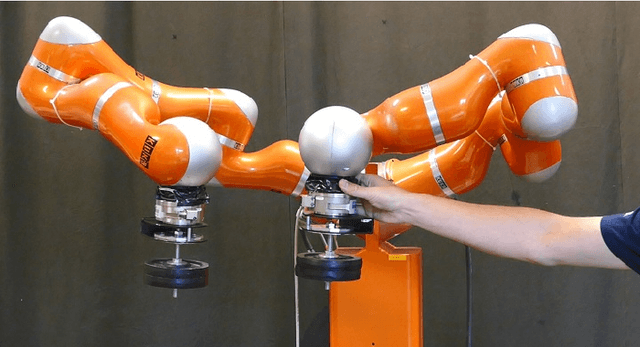

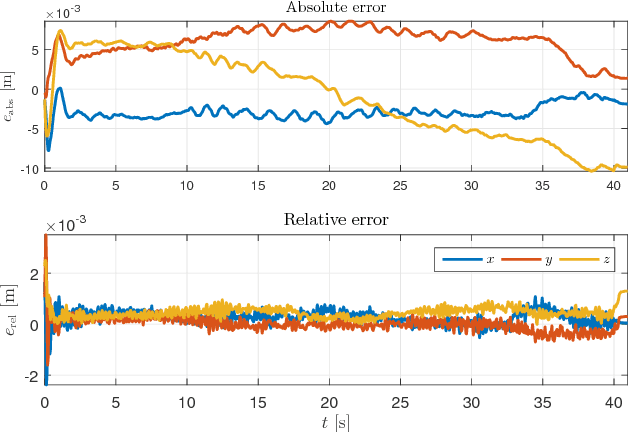

Simultaneously achieving low trajectory errors and compliant control \emph{without} explicit models of the task was effectively addressed with Compliant Movement Primitives (CMP). For a single-robot task, this means that it is accurately following its trajectory, but also exhibits compliant behavior in case of perturbations. In this paper we extend this kind of behavior without explicit models to bimanual tasks. In the presence of an external perturbation on any of the robots, they will both move in synchrony in order to maintain their relative posture, and thus not exert force on the object they are carrying. Thus, they will act compliantly in their absolute task, but remain stiff in their relative task. To achieve compliant absolute behavior and stiff relative behavior, we combine joint-space CMPs with the well known symmetric control approach. To reduce the necessary feedback reaction of symmetric control, we further augment it with copying of a virtual force vector at the end-effector, calculated through the measured external joint torques. Real-world results on two Kuka LWR-4 robots in a bimanual setting confirm the applicability of the approach.