 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDataFlow: An LLM-Driven Framework for Unified Data Preparation and Workflow Automation in the Era of Data-Centric AI
Dec 18, 2025The rapidly growing demand for high-quality data in Large Language Models (LLMs) has intensified the need for scalable, reliable, and semantically rich data preparation pipelines. However, current practices remain dominated by ad-hoc scripts and loosely specified workflows, which lack principled abstractions, hinder reproducibility, and offer limited support for model-in-the-loop data generation. To address these challenges, we present DataFlow, a unified and extensible LLM-driven data preparation framework. DataFlow is designed with system-level abstractions that enable modular, reusable, and composable data transformations, and provides a PyTorch-style pipeline construction API for building debuggable and optimizable dataflows. The framework consists of nearly 200 reusable operators and six domain-general pipelines spanning text, mathematical reasoning, code, Text-to-SQL, agentic RAG, and large-scale knowledge extraction. To further improve usability, we introduce DataFlow-Agent, which automatically translates natural-language specifications into executable pipelines via operator synthesis, pipeline planning, and iterative verification. Across six representative use cases, DataFlow consistently improves downstream LLM performance. Our math, code, and text pipelines outperform curated human datasets and specialized synthetic baselines, achieving up to +3\% execution accuracy in Text-to-SQL over SynSQL, +7\% average improvements on code benchmarks, and 1--3 point gains on MATH, GSM8K, and AIME. Moreover, a unified 10K-sample dataset produced by DataFlow enables base models to surpass counterparts trained on 1M Infinity-Instruct data. These results demonstrate that DataFlow provides a practical and high-performance substrate for reliable, reproducible, and scalable LLM data preparation, and establishes a system-level foundation for future data-centric AI development.
LADY: Linear Attention for Autonomous Driving Efficiency without Transformers
Dec 18, 2025End-to-end paradigms have demonstrated great potential for autonomous driving. Additionally, most existing methods are built upon Transformer architectures. However, transformers incur a quadratic attention cost, limiting their ability to model long spatial and temporal sequences-particularly on resource-constrained edge platforms. As autonomous driving inherently demands efficient temporal modeling, this challenge severely limits their deployment and real-time performance. Recently, linear attention mechanisms have gained increasing attention due to their superior spatiotemporal complexity. However, existing linear attention architectures are limited to self-attention, lacking support for cross-modal and cross-temporal interactions-both crucial for autonomous driving. In this work, we propose LADY, the first fully linear attention-based generative model for end-to-end autonomous driving. LADY enables fusion of long-range temporal context at inference with constant computational and memory costs, regardless of the history length of camera and LiDAR features. Additionally, we introduce a lightweight linear cross-attention mechanism that enables effective cross-modal information exchange. Experiments on the NAVSIM and Bench2Drive benchmarks demonstrate that LADY achieves state-of-the-art performance with constant-time and memory complexity, offering improved planning performance and significantly reduced computational cost. Additionally, the model has been deployed and validated on edge devices, demonstrating its practicality in resource-limited scenarios.
Efficient and Real-Time Motion Planning for Robotics Using Projection-Based Optimization
Jun 17, 2025Generating motions for robots interacting with objects of various shapes is a complex challenge, further complicated by the robot geometry and multiple desired behaviors. While current robot programming tools (such as inverse kinematics, collision avoidance, and manipulation planning) often treat these problems as constrained optimization, many existing solvers focus on specific problem domains or do not exploit geometric constraints effectively. We propose an efficient first-order method, Augmented Lagrangian Spectral Projected Gradient Descent (ALSPG), which leverages geometric projections via Euclidean projections, Minkowski sums, and basis functions. We show that by using geometric constraints rather than full constraints and gradients, ALSPG significantly improves real-time performance. Compared to second-order methods like iLQR, ALSPG remains competitive in the unconstrained case. We validate our method through toy examples and extensive simulations, and demonstrate its effectiveness on a 7-axis Franka robot, a 6-axis P-Rob robot and a 1:10 scale car in real-world experiments. Source codes, experimental data and videos are available on the project webpage: https://sites.google.com/view/alspg-oc
FSDP: Fast and Safe Data-Driven Overtaking Trajectory Planning for Head-to-Head Autonomous Racing Competitions
Mar 08, 2025Generating overtaking trajectories in autonomous racing is a challenging task, as the trajectory must satisfy the vehicle's dynamics and ensure safety and real-time performance running on resource-constrained hardware. This work proposes the Fast and Safe Data-Driven Planner to address this challenge. Sparse Gaussian predictions are introduced to improve both the computational efficiency and accuracy of opponent predictions. Furthermore, the proposed approach employs a bi-level quadratic programming framework to generate an overtaking trajectory leveraging the opponent predictions. The first level uses polynomial fitting to generate a rough trajectory, from which reference states and control inputs are derived for the second level. The second level formulates a model predictive control optimization problem in the Frenet frame, generating a trajectory that satisfies both kinematic feasibility and safety. Experimental results on the F1TENTH platform show that our method outperforms the State-of-the-Art, achieving an 8.93% higher overtaking success rate, allowing the maximum opponent speed, ensuring a smoother ego trajectory, and reducing 74.04% computational time compared to the Predictive Spliner method. The code is available at: https://github.com/ZJU-DDRX/FSDP.
Safe Dynamic Motion Generation in Configuration Space Using Differentiable Distance Fields
Dec 21, 2024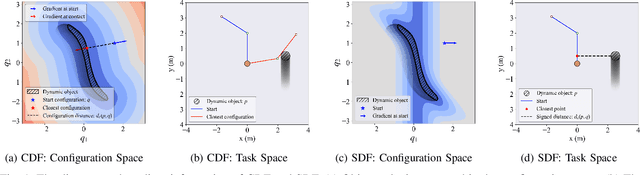
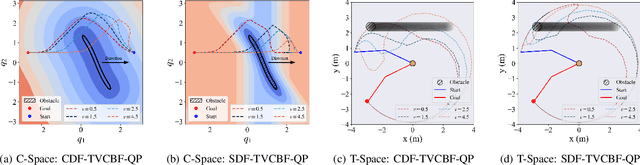
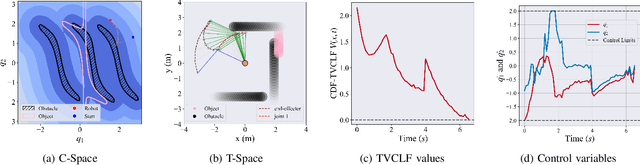
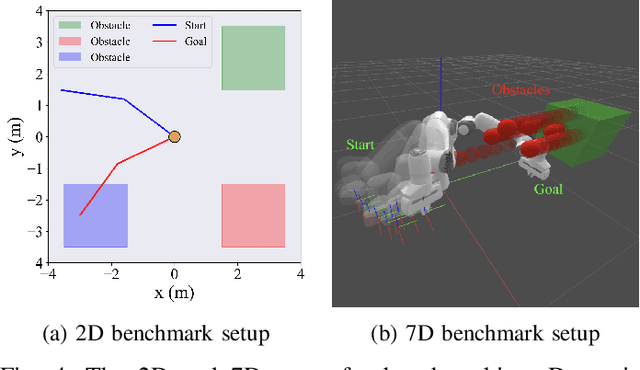
Generating collision-free motions in dynamic environments is a challenging problem for high-dimensional robotics, particularly under real-time constraints. Control Barrier Functions (CBFs), widely utilized in safety-critical control, have shown significant potential for motion generation. However, for high-dimensional robot manipulators, existing QP formulations and CBF-based methods rely on positional information, overlooking higher-order derivatives such as velocities. This limitation may lead to reduced success rates, decreased performance, and inadequate safety constraints. To address this, we construct time-varying CBFs (TVCBFs) that consider velocity conditions for obstacles. Our approach leverages recent developments on distance fields for articulated manipulators, a differentiable representation that enables the mapping of objects' position and velocity into the robot's joint space, offering a comprehensive understanding of the system's interactions. This allows the manipulator to be treated as a point-mass system thus simplifying motion generation tasks. Additionally, we introduce a time-varying control Lyapunov function (TVCLF) to enable whole-body contact motions. Our approach integrates the TVCBF, TVCLF, and manipulator physical constraints within a unified QP framework. We validate our method through simulations and comparisons with state-of-the-art approaches, demonstrating its effectiveness on a 7-axis Franka robot in real-world experiments.
GeoPro-VO: Dynamic Obstacle Avoidance with Geometric Projector Based on Velocity Obstacle
Mar 15, 2024Optimization-based approaches are widely employed to generate optimal robot motions while considering various constraints, such as robot dynamics, collision avoidance, and physical limitations. It is crucial to efficiently solve the optimization problems in practice, yet achieving rapid computations remains a great challenge for optimization-based approaches with nonlinear constraints. In this paper, we propose a geometric projector for dynamic obstacle avoidance based on velocity obstacle (GeoPro-VO) by leveraging the projection feature of the velocity cone set represented by VO. Furthermore, with the proposed GeoPro-VO and the augmented Lagrangian spectral projected gradient descent (ALSPG) algorithm, we transform an initial mixed integer nonlinear programming problem (MINLP) in the form of constrained model predictive control (MPC) into a sub-optimization problem and solve it efficiently. Numerical simulations are conducted to validate the fast computing speed of our approach and its capability for reliable dynamic obstacle avoidance.
When ChatGPT is gone: Creativity reverts and homogeneity persists
Jan 11, 2024ChatGPT has been evidenced to enhance human performance in creative tasks. Yet, it is still unclear if this boosting effect sustains with and without ChatGPT. In a pre-registered seven-day lab experiment and a follow-up survey after 30 days of experiment completion, we examined the impacts of ChatGPT presence and absence on sustained creativity using a text dataset of 3302 creative ideas and 427 creative solutions from 61 college students. Participants in the treatment group used ChatGPT in creative tasks, while those in the control group completed the tasks by themselves. The findings show that although the boosting effect of ChatGPT was consistently observed over a five-day creative journey, human creative performance reverted to baseline when ChatGPT was down on the 7th and the 30th day. More critically, the use of ChatGPT in creative tasks resulted in increasingly homogenized contents, and this homogenization effect persisted even when ChatGPT was absence. These findings pose a challenge to the prevailing argument that ChatGPT can enhance human creativity. In fact, generative AI like ChatGPT lends to human with a temporary rise in creative performance but boxes human creative capability in the long run, highlighting the imperative for cautious generative AI integration in creative endeavors.
Whole-body Dynamic Collision Avoidance with Time-varying Control Barrier Functions
Nov 30, 2023Recently, there has been increasing attention in robot research towards the whole-body collision avoidance. In this paper, we propose a safety-critical controller that utilizes time-varying control barrier functions (time varying CBFs) constructed by Robo-centric Euclidean Signed Distance Field (RC-ESDF) to achieve dynamic collision avoidance. The RC-ESDF is constructed in the robot body frame and solely relies on the robot's shape, eliminating the need for real-time updates to save computational resources. Additionally, we design two control Lyapunov functions (CLFs) to ensure that the robot can reach its destination. To enable real-time application, our safety-critical controller which incorporates CLFs and CBFs as constraints is formulated as a quadratic program (QP) optimization problem. We conducted numerical simulations on two different dynamics of an L-shaped robot to verify the effectiveness of our proposed approach.
Fast Path Planning for Autonomous Vehicle Parking with Safety-Guarantee using Hamilton-Jacobi Reachability
Oct 21, 2023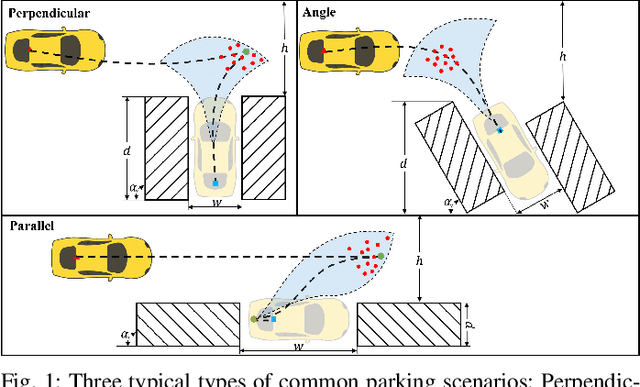
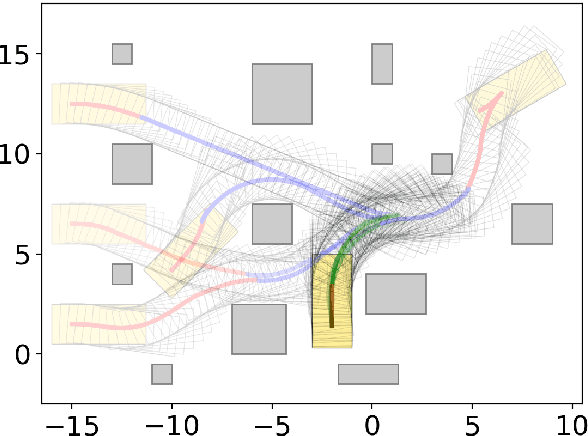
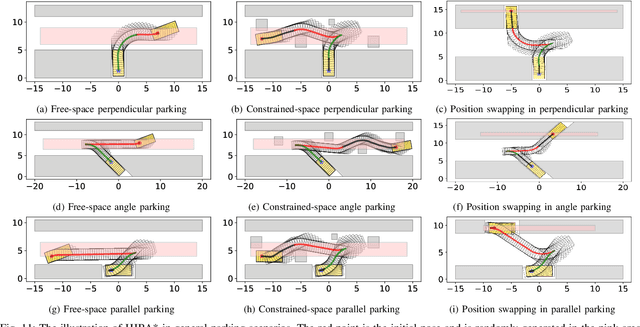
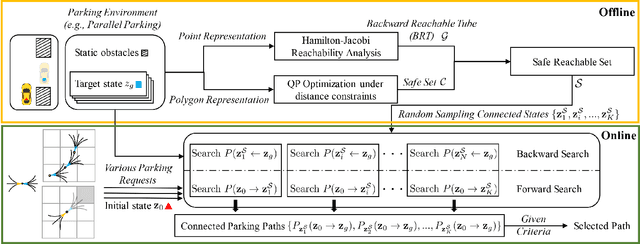
We present a fast planning architecture called Hamilton-Jacobi-based bidirectional A* (HJBA*) to solve general tight parking scenarios. The algorithm is a two-layer composed of a high-level HJ-based reachability analysis and a lower-level bidirectional A* search algorithm. In high-level reachability analysis, a backward reachable tube (BRT) concerning vehicle dynamics is computed by the HJ analysis and it intersects with a safe set to get a safe reachable set. The safe set is defined by constraints of positive signed distances for obstacles in the environment and computed by solving QP optimization problems offline. For states inside the intersection set, i.e., the safe reachable set, the computed backward reachable tube ensures they are reachable subjected to system dynamics and input bounds, and the safe set guarantees they satisfy parking safety with respect to obstacles in different shapes. For online computation, randomized states are sampled from the safe reachable set, and used as heuristic guide points to be considered in the bidirectional A* search. The bidirectional A* search is paralleled for each randomized state from the safe reachable set. We show that the proposed two-level planning algorithm is able to solve different parking scenarios effectively and computationally fast for typical parking requests. We validate our algorithm through simulations in large-scale randomized parking scenarios and demonstrate it to be able to outperform other state-of-the-art parking planning algorithms.
Obstacle Avoidance for Unicycle-Modelled Mobile Robots with Time-varying Control Barrier Functions
Jul 17, 2023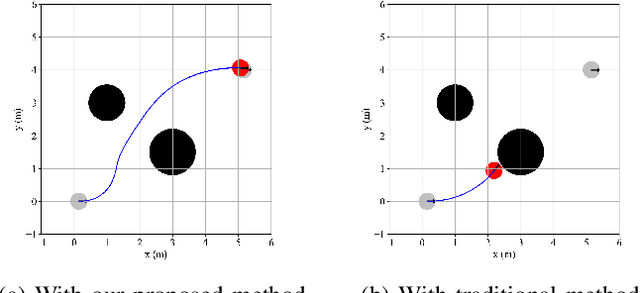
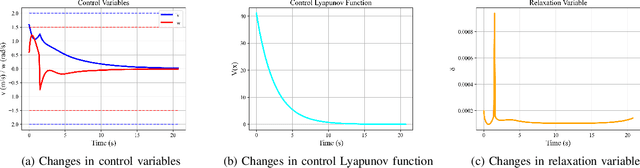
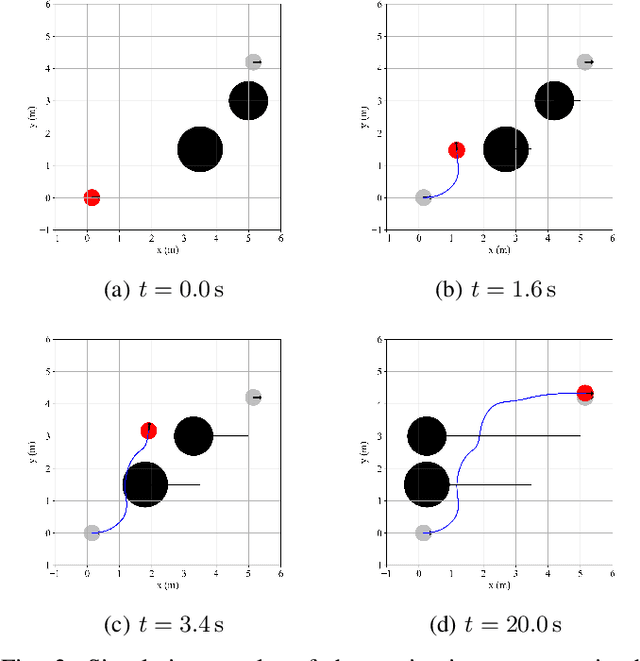
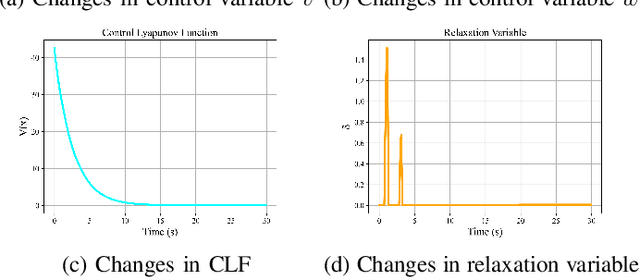
In this paper, we propose a safety-critical controller based on time-varying control barrier functions (CBFs) for a robot with an unicycle model in the continuous-time domain to achieve navigation and dynamic collision avoidance. Unlike previous works, our proposed approach can control both linear and angular velocity to avoid collision with obstacles, overcoming the limitation of confined control performance due to the lack of control variable. To ensure that the robot reaches its destination, we also design a control Lyapunov function (CLF). Our safety-critical controller is formulated as a quadratic program (QP) optimization problem that incorporates CLF and CBFs as constraints, enabling real-time application for navigation and dynamic collision avoidance. Numerical simulations are conducted to verify the effectiveness of our proposed approach.