 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFauna Sprout: A lightweight, approachable, developer-ready humanoid robot
Jan 26, 2026Recent advances in learned control, large-scale simulation, and generative models have accelerated progress toward general-purpose robotic controllers, yet the field still lacks platforms suitable for safe, expressive, long-term deployment in human environments. Most existing humanoids are either closed industrial systems or academic prototypes that are difficult to deploy and operate around people, limiting progress in robotics. We introduce Sprout, a developer platform designed to address these limitations through an emphasis on safety, expressivity, and developer accessibility. Sprout adopts a lightweight form factor with compliant control, limited joint torques, and soft exteriors to support safe operation in shared human spaces. The platform integrates whole-body control, manipulation with integrated grippers, and virtual-reality-based teleoperation within a unified hardware-software stack. An expressive head further enables social interaction -- a domain that remains underexplored on most utilitarian humanoids. By lowering physical and technical barriers to deployment, Sprout expands access to capable humanoid platforms and provides a practical basis for developing embodied intelligence in real human environments.
Safe Dynamic Motion Generation in Configuration Space Using Differentiable Distance Fields
Dec 21, 2024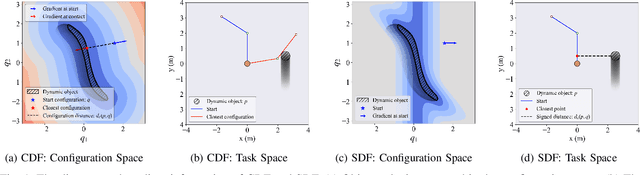
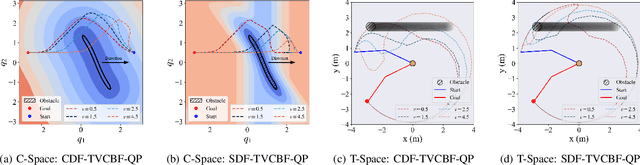
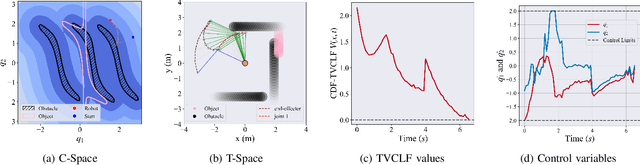
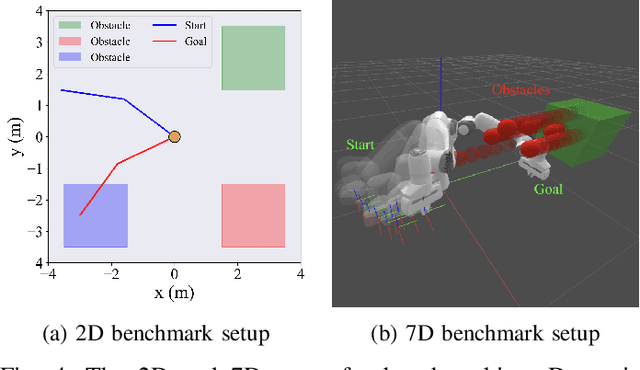
Generating collision-free motions in dynamic environments is a challenging problem for high-dimensional robotics, particularly under real-time constraints. Control Barrier Functions (CBFs), widely utilized in safety-critical control, have shown significant potential for motion generation. However, for high-dimensional robot manipulators, existing QP formulations and CBF-based methods rely on positional information, overlooking higher-order derivatives such as velocities. This limitation may lead to reduced success rates, decreased performance, and inadequate safety constraints. To address this, we construct time-varying CBFs (TVCBFs) that consider velocity conditions for obstacles. Our approach leverages recent developments on distance fields for articulated manipulators, a differentiable representation that enables the mapping of objects' position and velocity into the robot's joint space, offering a comprehensive understanding of the system's interactions. This allows the manipulator to be treated as a point-mass system thus simplifying motion generation tasks. Additionally, we introduce a time-varying control Lyapunov function (TVCLF) to enable whole-body contact motions. Our approach integrates the TVCBF, TVCLF, and manipulator physical constraints within a unified QP framework. We validate our method through simulations and comparisons with state-of-the-art approaches, demonstrating its effectiveness on a 7-axis Franka robot in real-world experiments.
Sailing Through Point Clouds: Safe Navigation Using Point Cloud Based Control Barrier Functions
Mar 27, 2024



The capability to navigate safely in an unstructured environment is crucial when deploying robotic systems in real-world scenarios. Recently, control barrier function (CBF) based approaches have been highly effective in synthesizing safety-critical controllers. In this work, we propose a novel CBF-based local planner comprised of two components: Vessel and Mariner. The Vessel is a novel scaling factor based CBF formulation that synthesizes CBFs using only point cloud data. The Mariner is a CBF-based preview control framework that is used to mitigate getting stuck in spurious equilibria during navigation. To demonstrate the efficacy of our proposed approach, we first compare the proposed point cloud based CBF formulation with other point cloud based CBF formulations. Then, we demonstrate the performance of our proposed approach and its integration with global planners using experimental studies on the Unitree B1 and Unitree Go2 quadruped robots in various environments.
Differentiable Optimization Based Time-Varying Control Barrier Functions for Dynamic Obstacle Avoidance
Sep 29, 2023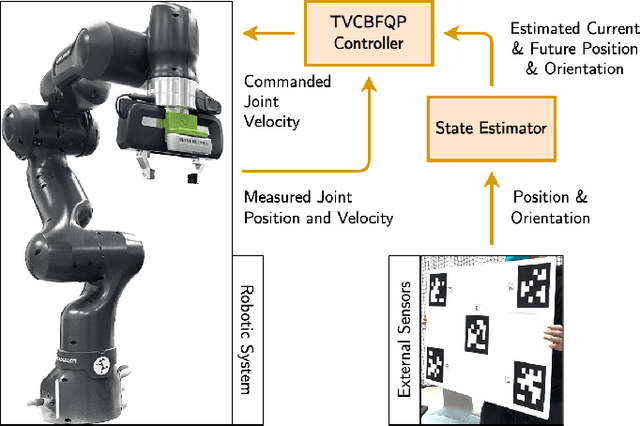

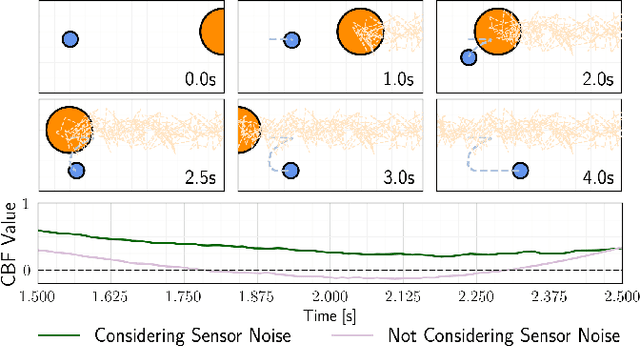
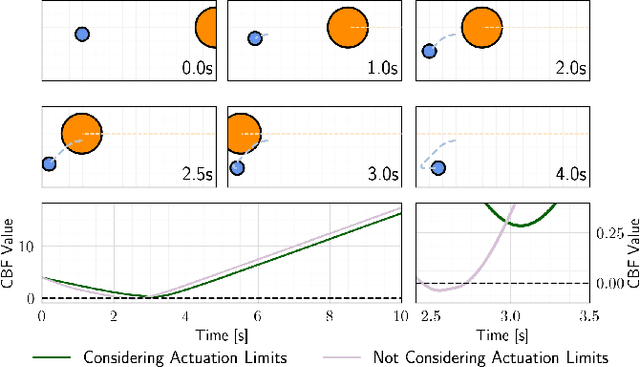
Control barrier functions (CBFs) provide a simple yet effective way for safe control synthesis. Recently, work has been done using differentiable optimization based methods to systematically construct CBFs for static obstacle avoidance tasks between geometric shapes. In this work, we extend the application of differentiable optimization based CBFs to perform dynamic obstacle avoidance tasks. We show that by using the time-varying CBF (TVCBF) formulation, we can perform obstacle avoidance for dynamic geometric obstacles. Additionally, we show how to alter the TVCBF constraint to consider measurement noise and actuation limits. To demonstrate the efficacy of our proposed approach, we first compare its performance with a model predictive control based method on a simulated dynamic obstacle avoidance task with non-ellipsoidal obstacles. Then, we demonstrate the performance of our proposed approach in experimental studies using a 7-degree-of-freedom Franka Research 3 robotic manipulator.
Minigrid & Miniworld: Modular & Customizable Reinforcement Learning Environments for Goal-Oriented Tasks
Jun 24, 2023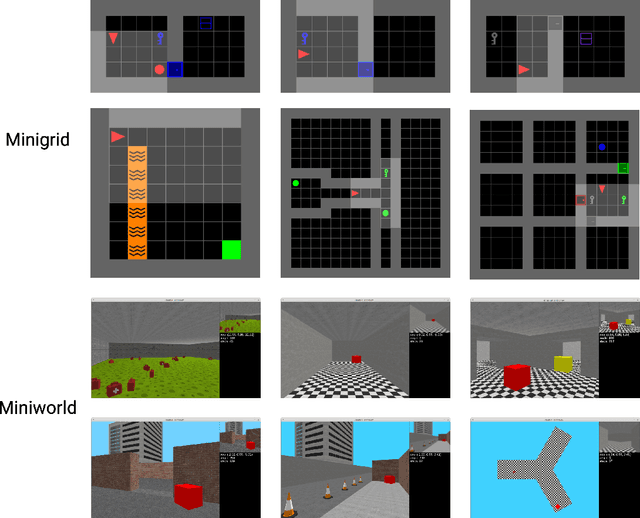


We present the Minigrid and Miniworld libraries which provide a suite of goal-oriented 2D and 3D environments. The libraries were explicitly created with a minimalistic design paradigm to allow users to rapidly develop new environments for a wide range of research-specific needs. As a result, both have received widescale adoption by the RL community, facilitating research in a wide range of areas. In this paper, we outline the design philosophy, environment details, and their world generation API. We also showcase the additional capabilities brought by the unified API between Minigrid and Miniworld through case studies on transfer learning (for both RL agents and humans) between the different observation spaces. The source code of Minigrid and Miniworld can be found at https://github.com/Farama-Foundation/{Minigrid, Miniworld} along with their documentation at https://{minigrid, miniworld}.farama.org/.
Safe Navigation and Obstacle Avoidance Using Differentiable Optimization Based Control Barrier Functions
Apr 17, 2023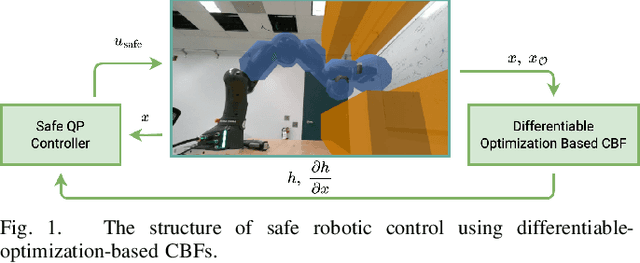

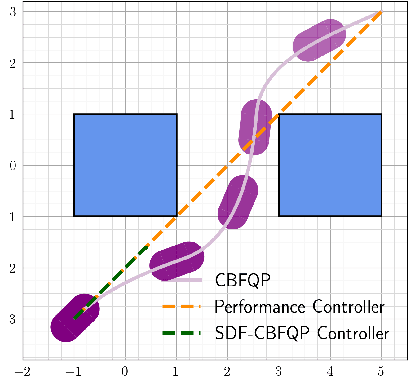

Control barrier functions (CBFs) have been widely applied to safety-critical robotic applications. However, the construction of control barrier functions for robotic systems remains a challenging task. Recently, collision detection using differentiable optimization has provided a way to compute the minimum uniform scaling factor that results in an intersection between two convex shapes and to also compute the Jacobian of the scaling factor. In this paper, we propose a framework that uses this scaling factor, with an offset, to systematically define a CBF for obstacle avoidance tasks. We provide a theoretical analysis that proves the continuity of the proposed CBF. Empirically, we show that the proposed CBF is continuously differentiable, and the resulting optimal control problem is computationally efficient, which makes it applicable for real-time robotic control. We validate our approach, first using a 2D mobile robot example, then on the Franka-Emika Research~3 (FR3) robot manipulator both in simulation and experiment.
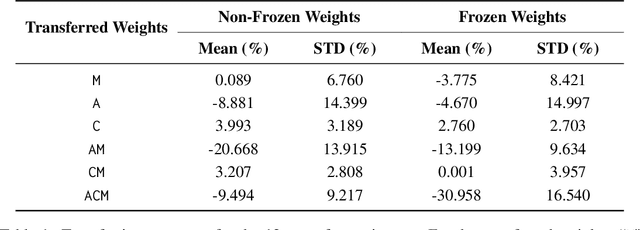
Learning a Better Control Barrier Function
May 11, 2022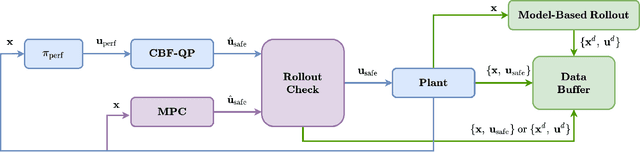
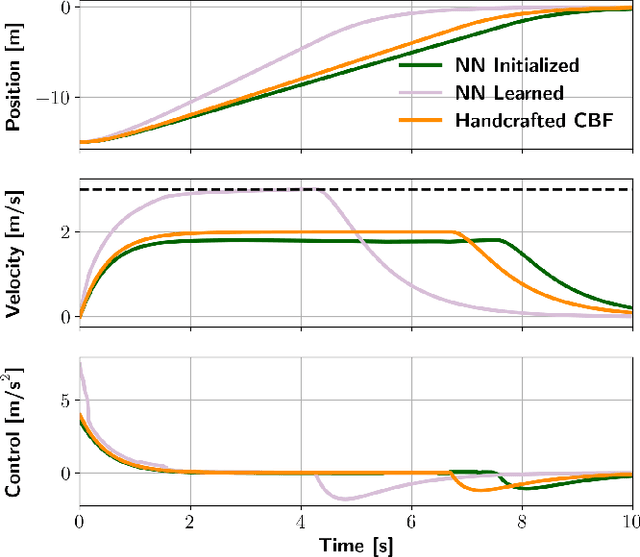
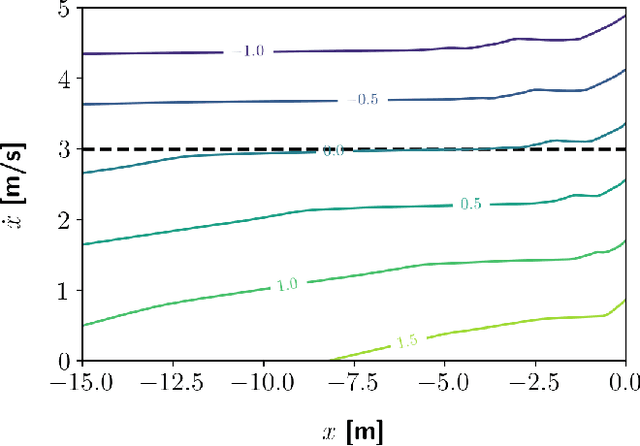
Control barrier functions (CBF) are widely used in safety-critical controllers. However, the construction of valid CBFs is well known to be challenging, especially for nonlinear or non-convex constraints and high relative degree systems. On the other hand, finding a conservative CBF that only recovers a portion of the true safe set is usually possible. In this work, starting from a "conservative" handcrafted control barrier function (HCBF), we develop a method to find a control barrier function that recovers a reasonably larger portion of the safe set. Using a different approach, by incorporating the hard constraints into an optimal control problem, e.g., MPC, we can safely generate solutions within the true safe set. Nevertheless, such an approach is usually computationally expensive and may not lend itself to real-time implementations. We propose to combine the two methods. During training, we utilize MPC to collect safe trajectory data. Thereafter, we train a neural network to estimate the difference between the HCBF and the CBF that recovers a closer solution to the true safe set. Using the proposed approach, we can generate a safe controller that is less conservative and computationally efficient. We validate our approach on three systems: a second-order integrator, ball-on-beam, and unicycle.
Adaptive Identification of Legged Robotic Kinematic Structure
Jul 25, 2021Model-based control usually relies on an accurate model, which is often obtained from CAD and actuator models. The more accurate the model the better the control performance. However, in bipedal robots that demonstrate high agility actions, such as running and hopping, the robot hardware will suffer from impacts with the environment and deform in vulnerable parts, which invalidates the predefined model. Thus, it is desired to have an adaptable kinematic structure that takes deformation into consideration. To account for this we propose an approach that models all of the robotic joints as 6-DOF joints and develop an algorithm that can identify the kinematic structure from motion capture data. We evaluate the algorithm's performance both in simulation - a three link pendulum, and on a bipedal robot - ATRIAS. In the simulated case the algorithm produces a result that has a 3.6% error compared to the ground truth, and on the real life bipedal robot the algorithm's result confirms our prior assumption where the joint deforms on out-of-plane degrees of freedom. In addition our algorithm is able to predict torques and forces using the reconstructed joint mode.
Learning Locomotion Controllers for Walking Using Deep FBSDE
Jul 16, 2021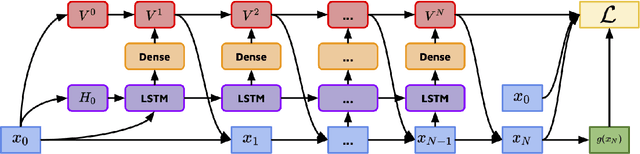
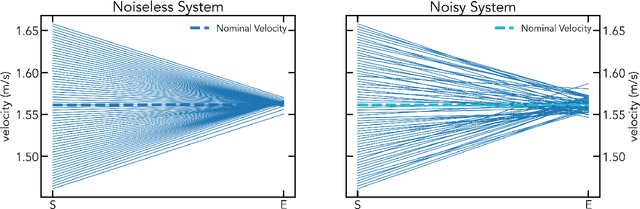

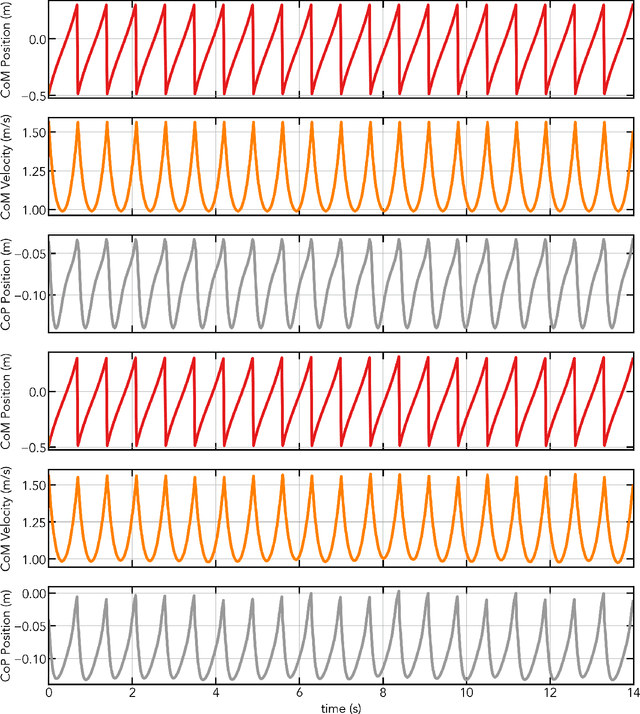
In this paper, we propose a deep forward-backward stochastic differential equation (FBSDE) based control algorithm for locomotion tasks. We also include state constraints in the FBSDE formulation to impose stable walking solutions or other constraints that one may want to consider (e.g., energy). Our approach utilizes a deep neural network (i.e., LSTM) to solve, in general, high-dimensional Hamilton-Jacobi-Bellman (HJB) equation resulting from the stated optimal control problem. As compared to traditional methods, our proposed method provides a higher computational efficiency in real-time; thus yielding higher frequency implementation of the closed-loop controllers. The efficacy of our approach is shown on a linear inverted pendulum model (LIPM) for walking. Even though we are deploying a simplified model of walking, the methodology is applicable to generalized and complex models for walking and other control/optimization tasks in robotic systems. Simulation studies have been provided to show the effectiveness of the proposed methodology.
GRP Model for Sensorimotor Learning
Mar 01, 2019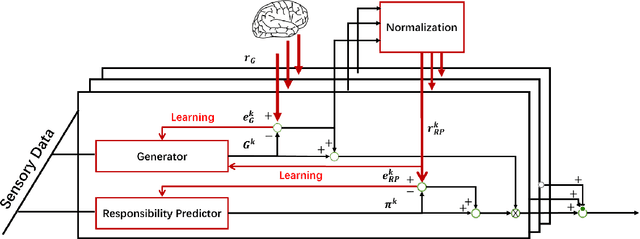
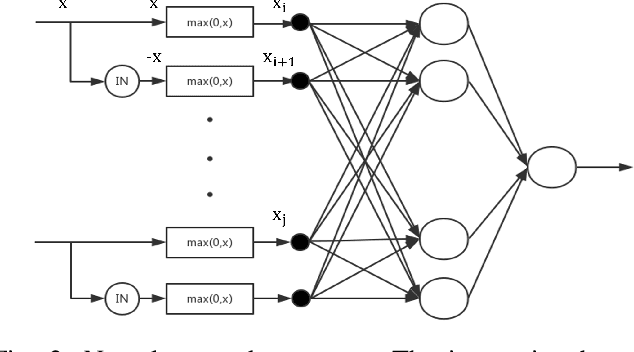
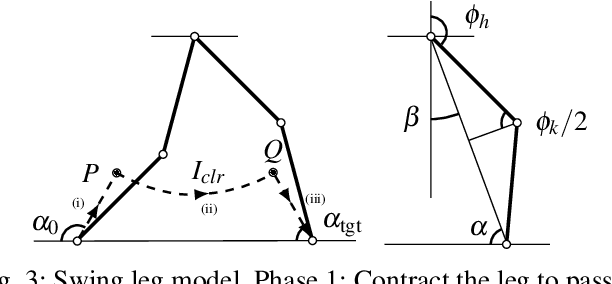
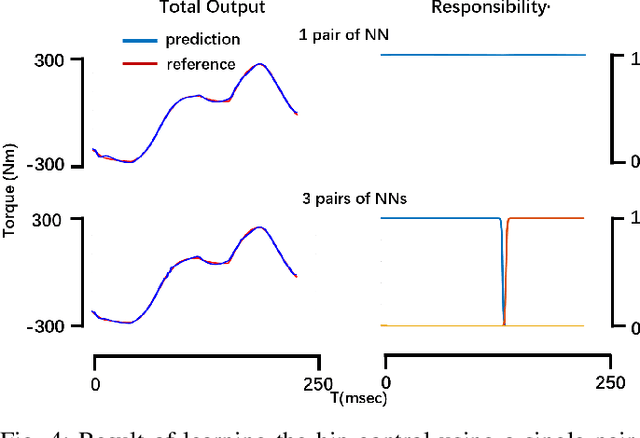
Learning from complex demonstrations is challenging, especially when the demonstration consists of different strategies. A popular approach is to use a deep neural network to perform imitation learning. However, the structure of that deep neural network has to be ``deep" enough to capture all possible scenarios. Besides the machine learning issue, how humans learn in the sense of physiology has rarely been addressed and relevant works on spinal cord learning are rarer. In this work, we develop a novel modular learning architecture, the Generator and Responsibility Predictor (GRP) model, which automatically learns the sub-task policies from an unsegmented controller demonstration and learns to switch between the policies. We also introduce a more physiological based neural network architecture. We implemented our GRP model and our proposed neural network to form a model the transfers the swing leg control from the brain to the spinal cord. Our result suggests that by using the GRP model the brain can successfully transfer the target swing leg control to the spinal cord and the resulting model can switch between sub-control policies automatically.