 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Locomotion Controllers for Walking Using Deep FBSDE
Jul 16, 2021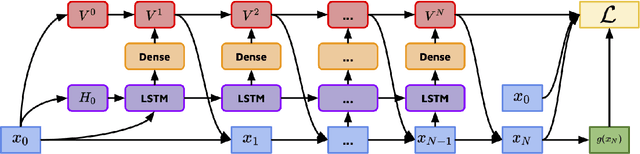
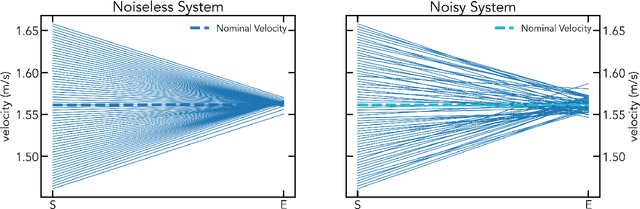

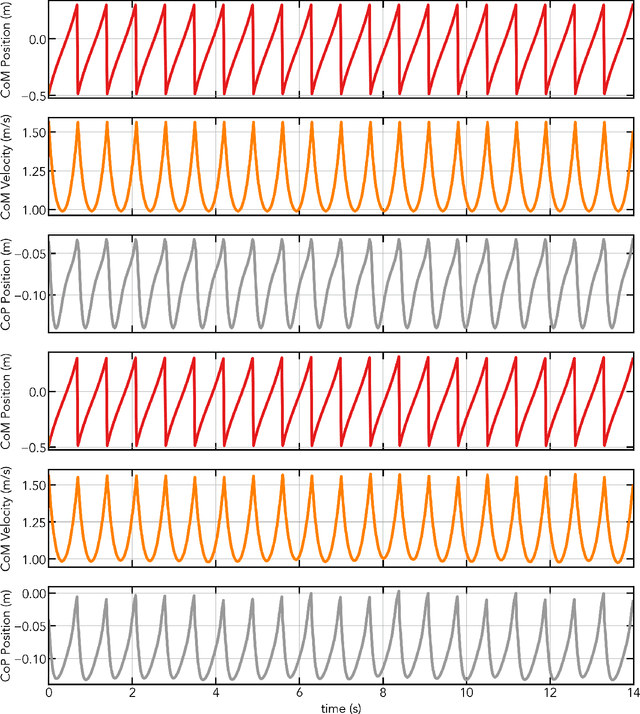
In this paper, we propose a deep forward-backward stochastic differential equation (FBSDE) based control algorithm for locomotion tasks. We also include state constraints in the FBSDE formulation to impose stable walking solutions or other constraints that one may want to consider (e.g., energy). Our approach utilizes a deep neural network (i.e., LSTM) to solve, in general, high-dimensional Hamilton-Jacobi-Bellman (HJB) equation resulting from the stated optimal control problem. As compared to traditional methods, our proposed method provides a higher computational efficiency in real-time; thus yielding higher frequency implementation of the closed-loop controllers. The efficacy of our approach is shown on a linear inverted pendulum model (LIPM) for walking. Even though we are deploying a simplified model of walking, the methodology is applicable to generalized and complex models for walking and other control/optimization tasks in robotic systems. Simulation studies have been provided to show the effectiveness of the proposed methodology.
Hardware Trojan Detection Using Controlled Circuit Aging
Apr 21, 2020



This paper reports a novel approach that uses transistor aging in an integrated circuit (IC) to detect hardware Trojans. When a transistor is aged, it results in delays along several paths of the IC. This increase in delay results in timing violations that reveal as timing errors at the output of the IC during its operation. We present experiments using aging-aware standard cell libraries to illustrate the usefulness of the technique in detecting hardware Trojans. Combining IC aging with over-clocking produces a pattern of bit errors at the IC output by the induced timing violations. We use machine learning to learn the bit error distribution at the output of a clean IC. We differentiate the divergence in the pattern of bit errors because of a Trojan in the IC from this baseline distribution. We simulate the golden IC and show robustness to IC-to-IC manufacturing variations. The approach is effective and can detect a Trojan even if we place it far off the critical paths. Results on benchmarks from the Trust-hub show a detection accuracy of $\geq$99%.