 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeG-MAPP: GPU-accelerated Multi-Agent Planning and Perception for Reactive Motion Generation
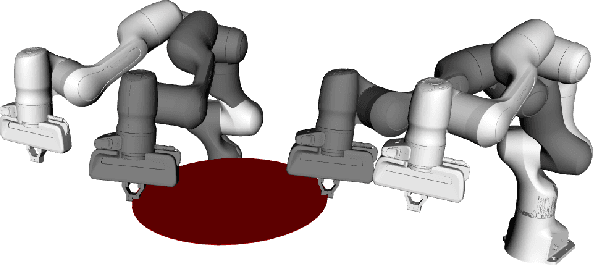
Jun 10, 2026Reactive motion generation in unstructured environments remains an open challenge in robotics. Due to the computational complexity of collision-free motion generation, existing methods either generate global trajectories for static scenarios, or employ models that make conservative assumptions about the environment. This paper identifies the primary bottleneck as the runtime performance demand of planning on high-fidelity environments, and the temporal integration between the perception and planning modules. Therefore, we propose a framework that does not compromise on runtime performance and world representations for perception and planning by accelerating world modeling and vector-field based planning using the GPU. This allows us to achieve faster parallel state exploration for quasi-global trajectory planning, and tighter coupling of the perception-action loop in real-time for dynamic cluttered environments with off-the-shelf depth sensors. We quantitatively evaluate the computation-time and success rate differences for the CPU and GPU versions of our planner, and perform qualitative evaluations of our coupled framework using real-world experiments on a 7-DoF Franka Emika robot. Experimental results demonstrate that our GPU-based framework achieves up to a 5x speedup over the CPU version and successfully avoids collisions across both trivial and challenging physical world scenarios.
* The implementation is available at: https://github.com/chart-research/g-mapp
Curve-Induced Dynamical Systems on Riemannian Manifolds and Lie Groups
Mar 05, 2026Deploying robots in household environments requires safe, adaptable, and interpretable behaviors that respect the geometric structure of tasks. Often represented on Lie groups and Riemannian manifolds, this includes poses on SE(3) or symmetric positive definite matrices encoding stiffness or damping matrices. In this context, dynamical system-based approaches offer a natural framework for generating such behavior, providing stability and convergence while remaining responsive to changes in the environment. We introduce Curve-induced Dynamical systems on Smooth Manifolds (CDSM), a real-time framework for constructing dynamical systems directly on Riemannian manifolds and Lie groups. The proposed approach constructs a nominal curve on the manifold, and generates a dynamical system which combines a tangential component that drives motion along the curve and a normal component that attracts the state toward the curve. We provide a stability analysis of the resulting dynamical system and validate the method quantitatively. On an S2 benchmark, CDSM demonstrates improved trajectory accuracy, reduced path deviation, and faster generation and query times compared to state-of-the-art methods. Finally, we demonstrate the practical applicability of the framework on both a robotic manipulator, where poses on SE(3) and damping matrices on SPD(n) are adapted online, and a mobile manipulator.
Cooperative Task Spaces for Multi-Arm Manipulation Control based on Similarity Transformations
Oct 30, 2025Many tasks in human environments require collaborative behavior between multiple kinematic chains, either to provide additional support for carrying big and bulky objects or to enable the dexterity that is required for in-hand manipulation. Since these complex systems often have a very high number of degrees of freedom coordinating their movements is notoriously difficult to model. In this article, we present the derivation of the theoretical foundations for cooperative task spaces of multi-arm robotic systems based on geometric primitives defined using conformal geometric algebra. Based on the similarity transformations of these cooperative geometric primitives, we derive an abstraction of complex robotic systems that enables representing these systems in a way that directly corresponds to single-arm systems. By deriving the associated analytic and geometric Jacobian matrices, we then show the straightforward integration of our approach into classical control techniques rooted in operational space control. We demonstrate this using bimanual manipulators, humanoids and multi-fingered hands in optimal control experiments for reaching desired geometric primitives and in teleoperation experiments using differential kinematics control. We then discuss how the geometric primitives naturally embed nullspace structures into the controllers that can be exploited for introducing secondary control objectives. This work, represents the theoretical foundations of this cooperative manipulation control framework, and thus the experiments are presented in an abstract way, while giving pointers towards potential future applications.
Efficient and Real-Time Motion Planning for Robotics Using Projection-Based Optimization
Jun 17, 2025Generating motions for robots interacting with objects of various shapes is a complex challenge, further complicated by the robot geometry and multiple desired behaviors. While current robot programming tools (such as inverse kinematics, collision avoidance, and manipulation planning) often treat these problems as constrained optimization, many existing solvers focus on specific problem domains or do not exploit geometric constraints effectively. We propose an efficient first-order method, Augmented Lagrangian Spectral Projected Gradient Descent (ALSPG), which leverages geometric projections via Euclidean projections, Minkowski sums, and basis functions. We show that by using geometric constraints rather than full constraints and gradients, ALSPG significantly improves real-time performance. Compared to second-order methods like iLQR, ALSPG remains competitive in the unconstrained case. We validate our method through toy examples and extensive simulations, and demonstrate its effectiveness on a 7-axis Franka robot, a 6-axis P-Rob robot and a 1:10 scale car in real-world experiments. Source codes, experimental data and videos are available on the project webpage: https://sites.google.com/view/alspg-oc
Diffusion-based Virtual Fixtures
Nov 04, 2024
Virtual fixtures assist human operators in teleoperation settings by constraining their actions. This extended abstract introduces a novel virtual fixture formulation \emph{on surfaces} for tactile robotics tasks. Unlike existing methods, our approach constrains the behavior based on the position on the surface and generalizes it over the surface by considering the distance (metric) on the surface. Our method works directly on possibly noisy and partial point clouds collected via a camera. Given a set of regions on the surface together with their desired behaviors, our method diffuses the behaviors across the entire surface by taking into account the surface geometry. We demonstrate our method's ability in two simulated experiments (i) to regulate contact force magnitude or tangential speed based on surface position and (ii) to guide the robot to targets while avoiding restricted regions defined on the surface. All source codes, experimental data, and videos are available as open access at https://sites.google.com/view/diffusion-virtual-fixtures
Tactile Ergodic Control Using Diffusion and Geometric Algebra
Feb 07, 2024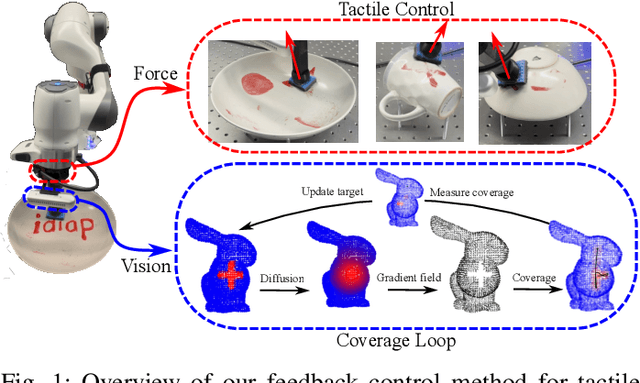

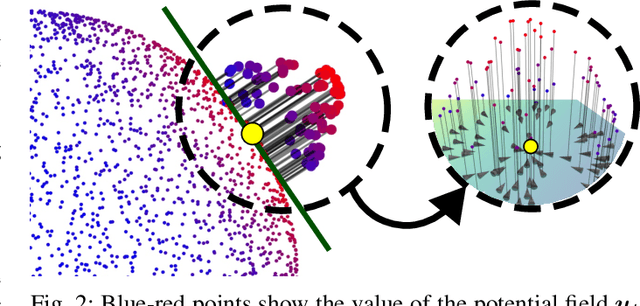
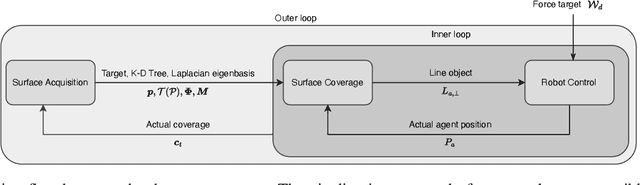
Continuous physical interaction between robots and their environment is a requirement in many industrial and household tasks, such as sanding and cleaning. Due to the complex tactile information, these tasks are notoriously difficult to model and to sense. In this article, we introduce a closed-loop control method that is constrained to surfaces. The applications that we target have in common that they can be represented by probability distributions on the surface that correlate to the time the robot should spend in a region. These surfaces can easily be captured jointly with the target distributions using coloured point clouds. We present the extension of an ergodic control approach that can be used with point clouds, based on heat equation-driven area coverage (HEDAC). Our method enables closed-loop exploration by measuring the actual coverage using vision. Unlike existing approaches, we approximate the potential field from non-stationary diffusion using spectral acceleration, which does not require complex preprocessing steps and achieves real-time closed-loop control frequencies. We exploit geometric algebra to stay in contact with the target surface by tracking a line while simultaneously exerting a desired force along that line. Our approach is suitable for fully autonomous and human-robot interaction settings where the robot can either directly measure the coverage of the target with its sensors or by being guided online by markings or annotations of a human expert. We tested the performance of the approach in kinematic simulation using point clouds, ranging from the Stanford bunny to a variety of kitchen utensils. Our real-world experiments demonstrate that the proposed approach can successfully be used to wash kitchenware with curved surfaces, by cleaning the dirt detected by vision in an online manner. Website: https://geometric-algebra.tobiloew.ch/tactile_ergodic_control
Extending the Cooperative Dual-Task Space in Conformal Geometric Algebra
Oct 29, 2023

In this work, we are presenting an extension of the cooperative dual-task space (CDTS) in conformal geometric algebra. The CDTS was first defined using dual quaternion algebra and is a well established framework for the simplified definition of tasks using two manipulators. By integrating conformal geometric algebra, we aim to further enhance the geometric expressiveness and thus simplify the modeling of various tasks. We show this formulation by first presenting the CDTS and then its extension that is based around a cooperative pointpair. This extension keeps all the benefits of the original formulation that is based on dual quaternions, but adds more tools for geometric modeling of the dual-arm tasks. We also present how this CGA-CDTS can be seamlessly integrated with an optimal control framework in geometric algebra that was derived in previous work. In the experiments, we demonstrate how to model different objectives and constraints using the CGA-CDTS. Using a setup of two Franka Emika robots we then show the effectiveness of our approach using model predictive control in real world experiments.
gafro: Geometric Algebra for Robotics
Oct 29, 2023Geometry is a fundamental part of robotics and there have been various frameworks of representation over the years. Recently, geometric algebra has gained attention for its property of unifying many of those previous ideas into one algebra. While there are already efficient open-source implementations of geometric algebra available, none of them is targeted at robotics applications. We want to address this shortcoming with our library gafro. This article presents an overview of the implementation details as well as a tutorial of gafro, an efficient c++ library targeting robotics applications using geometric algebra. The library focuses on using conformal geometric algebra. Hence, various geometric primitives are available for computation as well as rigid body transformations. The modeling of robotic systems is also an important aspect of the library. It implements various algorithms for calculating the kinematics and dynamics of such systems as well as objectives for optimisation problems. The software stack is completed by python bindings in pygafro and a ROS interface in gafro_ros.
Geometric Projectors: Geometric Constraints based Optimization for Robot Behaviors
Sep 15, 2023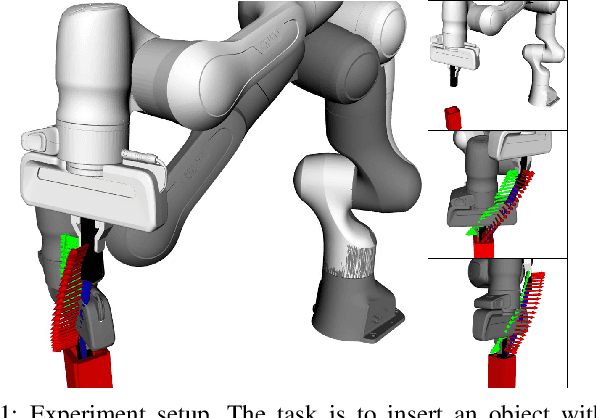



Generating motion for robots that interact with objects of various shapes is a complex challenge, further complicated when the robot's own geometry and multiple desired behaviors are considered. To address this issue, we introduce a new framework based on Geometric Projectors (GeoPro) for constrained optimization. This novel framework allows for the generation of task-agnostic behaviors that are compliant with geometric constraints. GeoPro streamlines the design of behaviors in both task and configuration spaces, offering diverse functionalities such as collision avoidance and goal-reaching, while maintaining high computational efficiency. We validate the efficacy of our work through simulations and Franka Emika robotic experiments, comparing its performance against state-of-the-art methodologies. This comprehensive evaluation highlights GeoPro's versatility in accommodating robots with varying dynamics and precise geometric shapes. For additional materials, please visit: https://www.xueminchi.com/publications/geopro
Projection-based first-order constrained optimization solver for robotics
Jun 30, 2023Robot programming tools ranging from inverse kinematics (IK) to model predictive control (MPC) are most often described as constrained optimization problems. Even though there are currently many commercially-available second-order solvers, robotics literature recently focused on efficient implementations and improvements over these solvers for real-time robotic applications. However, most often, these implementations stay problem-specific and are not easy to access or implement, or do not exploit the geometric aspect of the robotics problems. In this work, we propose to solve these problems using a fast, easy-to-implement first-order method that fully exploits the geometric constraints via Euclidean projections, called Augmented Lagrangian Spectral Projected Gradient Descent (ALSPG). We show that 1. using projections instead of full constraints and gradients improves the performance of the solver and 2. ALSPG stays competitive to the standard second-order methods such as iLQR in the unconstrained case. We showcase these results with IK and motion planning problems on simulated examples and with an MPC problem on a 7-axis manipulator experiment.