 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile Ergodic Control Using Diffusion and Geometric Algebra
Paper and Code
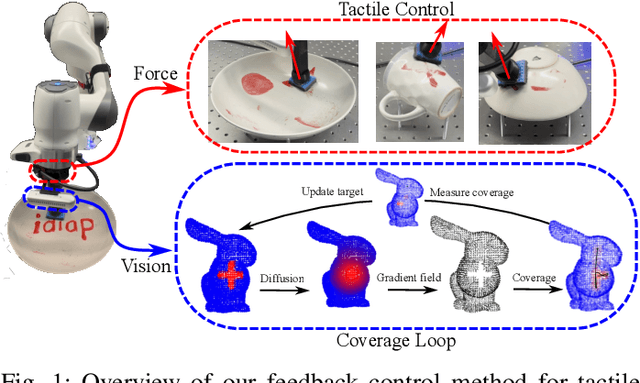

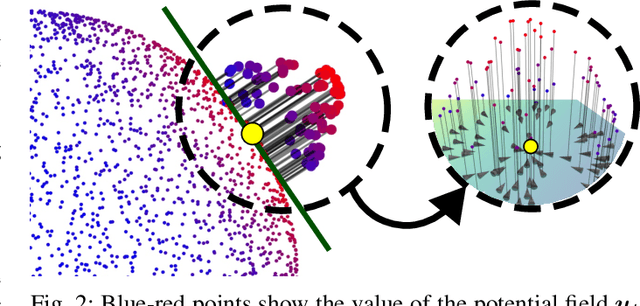
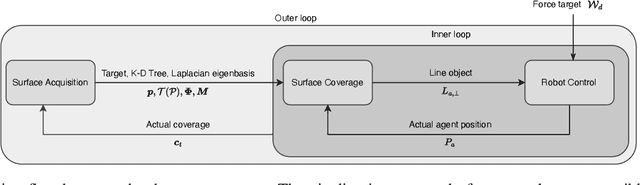
Continuous physical interaction between robots and their environment is a requirement in many industrial and household tasks, such as sanding and cleaning. Due to the complex tactile information, these tasks are notoriously difficult to model and to sense. In this article, we introduce a closed-loop control method that is constrained to surfaces. The applications that we target have in common that they can be represented by probability distributions on the surface that correlate to the time the robot should spend in a region. These surfaces can easily be captured jointly with the target distributions using coloured point clouds. We present the extension of an ergodic control approach that can be used with point clouds, based on heat equation-driven area coverage (HEDAC). Our method enables closed-loop exploration by measuring the actual coverage using vision. Unlike existing approaches, we approximate the potential field from non-stationary diffusion using spectral acceleration, which does not require complex preprocessing steps and achieves real-time closed-loop control frequencies. We exploit geometric algebra to stay in contact with the target surface by tracking a line while simultaneously exerting a desired force along that line. Our approach is suitable for fully autonomous and human-robot interaction settings where the robot can either directly measure the coverage of the target with its sensors or by being guided online by markings or annotations of a human expert. We tested the performance of the approach in kinematic simulation using point clouds, ranging from the Stanford bunny to a variety of kitchen utensils. Our real-world experiments demonstrate that the proposed approach can successfully be used to wash kitchenware with curved surfaces, by cleaning the dirt detected by vision in an online manner. Website: https://geometric-algebra.tobiloew.ch/tactile_ergodic_control