 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeErgodic Imitation for Adaptive Exploration around Demonstrations
May 13, 2026In robotics, a common challenge in imitation learning is the mismatch between training and deployment conditions, caused, for example, by environmental changes or imperfect observation and control. When a robot follows a nominal trajectory under such mismatch, it may become stuck and fail to complete the task. This calls for adaptive online exploration strategies that remain grounded in demonstrations. To this end, we propose an adaptive ergodic imitation approach that constructs a target distribution from the geometry of the retrieved demonstrations and uses it to generate trajectories that adaptively interpolate between tracking and exploration. Our method extends ergodic control beyond its traditional role in area-coverage and search by incorporating demonstrations into a retrieval-based receding-horizon framework for adaptive imitation.
Cooperative Task Spaces for Multi-Arm Manipulation Control based on Similarity Transformations
Oct 30, 2025Many tasks in human environments require collaborative behavior between multiple kinematic chains, either to provide additional support for carrying big and bulky objects or to enable the dexterity that is required for in-hand manipulation. Since these complex systems often have a very high number of degrees of freedom coordinating their movements is notoriously difficult to model. In this article, we present the derivation of the theoretical foundations for cooperative task spaces of multi-arm robotic systems based on geometric primitives defined using conformal geometric algebra. Based on the similarity transformations of these cooperative geometric primitives, we derive an abstraction of complex robotic systems that enables representing these systems in a way that directly corresponds to single-arm systems. By deriving the associated analytic and geometric Jacobian matrices, we then show the straightforward integration of our approach into classical control techniques rooted in operational space control. We demonstrate this using bimanual manipulators, humanoids and multi-fingered hands in optimal control experiments for reaching desired geometric primitives and in teleoperation experiments using differential kinematics control. We then discuss how the geometric primitives naturally embed nullspace structures into the controllers that can be exploited for introducing secondary control objectives. This work, represents the theoretical foundations of this cooperative manipulation control framework, and thus the experiments are presented in an abstract way, while giving pointers towards potential future applications.
Diffusion-based Virtual Fixtures
Nov 04, 2024
Virtual fixtures assist human operators in teleoperation settings by constraining their actions. This extended abstract introduces a novel virtual fixture formulation \emph{on surfaces} for tactile robotics tasks. Unlike existing methods, our approach constrains the behavior based on the position on the surface and generalizes it over the surface by considering the distance (metric) on the surface. Our method works directly on possibly noisy and partial point clouds collected via a camera. Given a set of regions on the surface together with their desired behaviors, our method diffuses the behaviors across the entire surface by taking into account the surface geometry. We demonstrate our method's ability in two simulated experiments (i) to regulate contact force magnitude or tangential speed based on surface position and (ii) to guide the robot to targets while avoiding restricted regions defined on the surface. All source codes, experimental data, and videos are available as open access at https://sites.google.com/view/diffusion-virtual-fixtures
Tactile Ergodic Control Using Diffusion and Geometric Algebra
Feb 07, 2024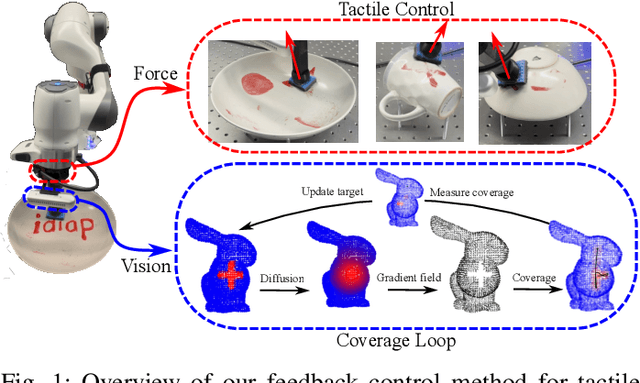

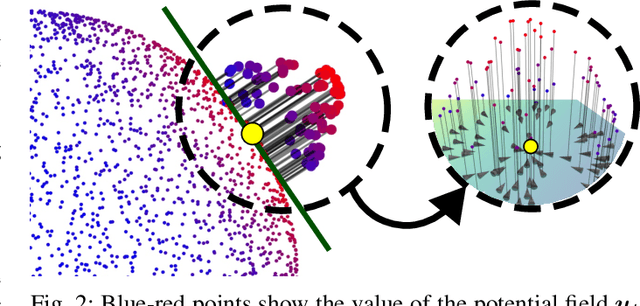
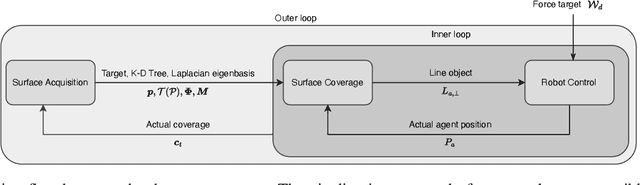
Continuous physical interaction between robots and their environment is a requirement in many industrial and household tasks, such as sanding and cleaning. Due to the complex tactile information, these tasks are notoriously difficult to model and to sense. In this article, we introduce a closed-loop control method that is constrained to surfaces. The applications that we target have in common that they can be represented by probability distributions on the surface that correlate to the time the robot should spend in a region. These surfaces can easily be captured jointly with the target distributions using coloured point clouds. We present the extension of an ergodic control approach that can be used with point clouds, based on heat equation-driven area coverage (HEDAC). Our method enables closed-loop exploration by measuring the actual coverage using vision. Unlike existing approaches, we approximate the potential field from non-stationary diffusion using spectral acceleration, which does not require complex preprocessing steps and achieves real-time closed-loop control frequencies. We exploit geometric algebra to stay in contact with the target surface by tracking a line while simultaneously exerting a desired force along that line. Our approach is suitable for fully autonomous and human-robot interaction settings where the robot can either directly measure the coverage of the target with its sensors or by being guided online by markings or annotations of a human expert. We tested the performance of the approach in kinematic simulation using point clouds, ranging from the Stanford bunny to a variety of kitchen utensils. Our real-world experiments demonstrate that the proposed approach can successfully be used to wash kitchenware with curved surfaces, by cleaning the dirt detected by vision in an online manner. Website: https://geometric-algebra.tobiloew.ch/tactile_ergodic_control
Whole-Body Exploration with a Manipulator Using Heat Equation
Jun 29, 2023



This paper presents a whole-body robot control method for exploring and probing a given region of interest. The ergodic control formalism behind such an exploration behavior consists of matching the time-averaged statistics of a robot trajectory with the spatial statistics of the target distribution. Most existing ergodic control approaches assume the robots/sensors as individual point agents moving in space. We introduce an approach exploiting multiple kinematically constrained agents on the whole-body of a robotic manipulator, where a consensus among the agents is found for generating control actions. To do so, we exploit an existing ergodic control formulation called heat equation-driven area coverage (HEDAC), combining local and global exploration on a potential field resulting from heat diffusion. Our approach extends HEDAC to applications where robots have multiple sensors on the whole-body (such as tactile skin) and use all sensors to optimally explore the given region. We show that our approach increases the exploration performance in terms of ergodicity and scales well to real-world problems using agents distributed on multiple robot links. We compare our method with HEDAC in kinematic simulation and demonstrate the applicability of an online exploration task with a 7-axis Franka Emika robot.