 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion-based Inverse Model of a Distributed Tactile Sensor for Object Pose Estimation
Jan 19, 2026Tactile sensing provides a promising sensing modality for object pose estimation in manipulation settings where visual information is limited due to occlusion or environmental effects. However, efficiently leveraging tactile data for estimation remains a challenge due to partial observability, with single observations corresponding to multiple possible contact configurations. This limits conventional estimation approaches largely tailored to vision. We propose to address these challenges by learning an inverse tactile sensor model using denoising diffusion. The model is conditioned on tactile observations from a distributed tactile sensor and trained in simulation using a geometric sensor model based on signed distance fields. Contact constraints are enforced during inference through single-step projection using distance and gradient information from the signed distance field. For online pose estimation, we integrate the inverse model with a particle filter through a proposal scheme that combines generated hypotheses with particles from the prior belief. Our approach is validated in simulated and real-world planar pose estimation settings, without access to visual data or tight initial pose priors. We further evaluate robustness to unmodeled contact and sensor dynamics for pose tracking in a box-pushing scenario. Compared to local sampling baselines, the inverse sensor model improves sampling efficiency and estimation accuracy while preserving multimodal beliefs across objects with varying tactile discriminability.
A Retrospective on the Robot Air Hockey Challenge: Benchmarking Robust, Reliable, and Safe Learning Techniques for Real-world Robotics
Nov 08, 2024Machine learning methods have a groundbreaking impact in many application domains, but their application on real robotic platforms is still limited. Despite the many challenges associated with combining machine learning technology with robotics, robot learning remains one of the most promising directions for enhancing the capabilities of robots. When deploying learning-based approaches on real robots, extra effort is required to address the challenges posed by various real-world factors. To investigate the key factors influencing real-world deployment and to encourage original solutions from different researchers, we organized the Robot Air Hockey Challenge at the NeurIPS 2023 conference. We selected the air hockey task as a benchmark, encompassing low-level robotics problems and high-level tactics. Different from other machine learning-centric benchmarks, participants need to tackle practical challenges in robotics, such as the sim-to-real gap, low-level control issues, safety problems, real-time requirements, and the limited availability of real-world data. Furthermore, we focus on a dynamic environment, removing the typical assumption of quasi-static motions of other real-world benchmarks. The competition's results show that solutions combining learning-based approaches with prior knowledge outperform those relying solely on data when real-world deployment is challenging. Our ablation study reveals which real-world factors may be overlooked when building a learning-based solution. The successful real-world air hockey deployment of best-performing agents sets the foundation for future competitions and follow-up research directions.
Energy-based Contact Planning under Uncertainty for Robot Air Hockey
Jul 04, 2024



Planning robot contact often requires reasoning over a horizon to anticipate outcomes, making such planning problems computationally expensive. In this letter, we propose a learning framework for efficient contact planning in real-time subject to uncertain contact dynamics. We implement our approach for the example task of robot air hockey. Based on a learned stochastic model of puck dynamics, we formulate contact planning for shooting actions as a stochastic optimal control problem with a chance constraint on hitting the goal. To achieve online re-planning capabilities, we propose to train an energy-based model to generate optimal shooting plans in real time. The performance of the trained policy is validated %in experiments both in simulation and on a real-robot setup. Furthermore, our approach was tested in a competitive setting as part of the NeurIPS 2023 Robot Air Hockey Challenge.
Planning for Robust Open-loop Pushing: Exploiting Quasi-static Belief Dynamics and Contact-informed Optimization
Apr 03, 2024Non-prehensile manipulation such as pushing is typically subject to uncertain, non-smooth dynamics. However, modeling the uncertainty of the dynamics typically results in intractable belief dynamics, making data-efficient planning under uncertainty difficult. This article focuses on the problem of efficiently generating robust open-loop pushing plans. First, we investigate how the belief over object configurations propagates through quasi-static contact dynamics. We exploit the simplified dynamics to predict the variance of the object configuration without sampling from a perturbation distribution. In a sampling-based trajectory optimization algorithm, the gain of the variance is constrained in order to enforce robustness of the plan. Second, we propose an informed trajectory sampling mechanism for drawing robot trajectories that are likely to make contact with the object. This sampling mechanism is shown to significantly improve chances of finding robust solutions, especially when making-and-breaking contacts is required. We demonstrate that the proposed approach is able to synthesize bi-manual pushing trajectories, resulting in successful long-horizon pushing maneuvers without exteroceptive feedback such as vision or tactile feedback.
CC-VPSTO: Chance-Constrained Via-Point-based Stochastic Trajectory Optimisation for Safe and Efficient Online Robot Motion Planning
Feb 06, 2024Safety in the face of uncertainty is a key challenge in robotics. We introduce a real-time capable framework to generate safe and task-efficient robot motions for stochastic control problems. We frame this as a chance-constrained optimisation problem constraining the probability of the controlled system to violate a safety constraint to be below a set threshold. To estimate this probability we propose a Monte--Carlo approximation. We suggest several ways to construct the problem given a fixed number of uncertainty samples, such that it is a reliable over-approximation of the original problem, i.e. any solution to the sample-based problem adheres to the original chance-constraint with high confidence. To solve the resulting problem, we integrate it into our motion planner VP-STO and name the enhanced framework Chance-Constrained (CC)-VPSTO. The strengths of our approach lie in i) its generality, without assumptions on the underlying uncertainty distribution, system dynamics, cost function, or the form of inequality constraints; and ii) its applicability to MPC-settings. We demonstrate the validity and efficiency of our approach on both simulation and real-world robot experiments.
AiRLIHockey: Highly Reactive Contact Control and Stochastic Optimal Shooting
Jan 26, 2024Air hockey is a highly reactive game which requires the player to quickly reason over stochastic puck and contact dynamics. We implement a hierarchical framework which combines stochastic optimal control for planning shooting angles and sampling-based model-predictive control for continuously generating constrained mallet trajectories. Our agent was deployed and evaluated in simulation and on a physical setup as part of the Robot Air-Hockey challenge competition at NeurIPS 2023.
VP-STO: Via-point-based Stochastic Trajectory Optimization for Reactive Robot Behavior
Oct 08, 2022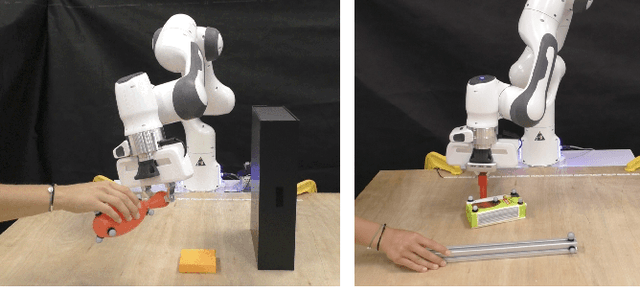
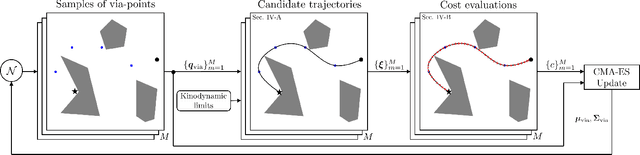
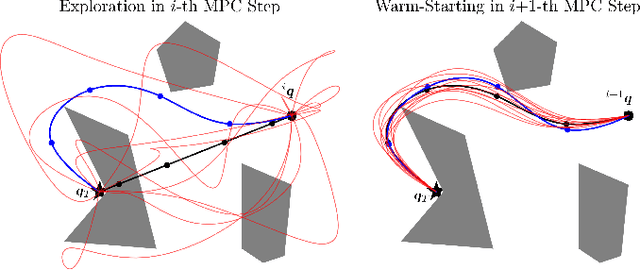
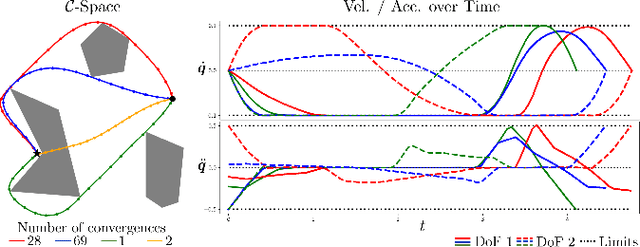
Achieving reactive robot behavior in complex dynamic environments is still challenging as it relies on being able to solve trajectory optimization problems quickly enough, such that we can replan the future motion at frequencies which are sufficiently high for the task at hand. We argue that current limitations in Model Predictive Control (MPC) for robot manipulators arise from inefficient, high-dimensional trajectory representations and the negligence of time-optimality in the trajectory optimization process. Therefore, we propose a motion optimization framework that optimizes jointly over space and time, generating smooth and timing-optimal robot trajectories in joint-space. While being task-agnostic, our formulation can incorporate additional task-specific requirements, such as collision avoidance, and yet maintain real-time control rates, demonstrated in simulation and real-world robot experiments on closed-loop manipulation.
Reactive Anticipatory Robot Skills with Memory
Sep 23, 2022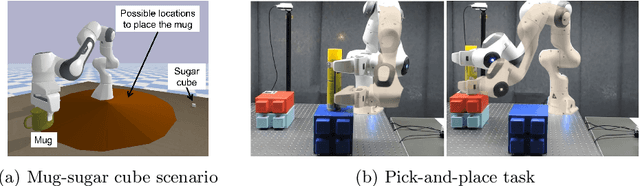
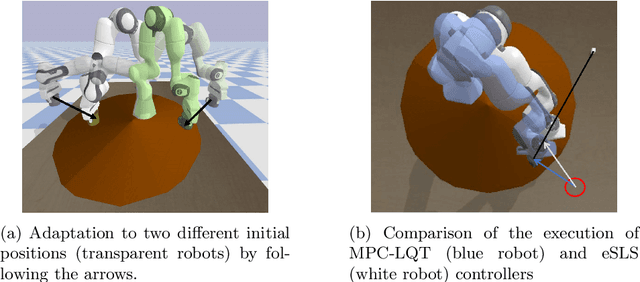
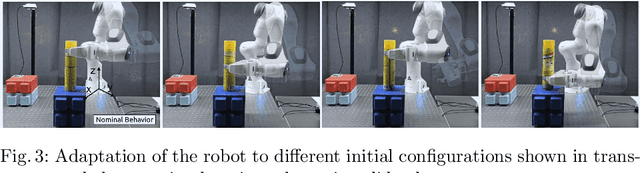
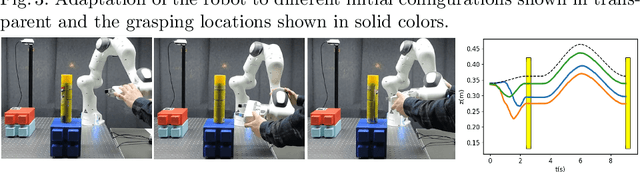
Optimal control in robotics has been increasingly popular in recent years and has been applied in many applications involving complex dynamical systems. Closed-loop optimal control strategies include model predictive control (MPC) and time-varying linear controllers optimized through iLQR. However, such feedback controllers rely on the information of the current state, limiting the range of robotic applications where the robot needs to remember what it has done before to act and plan accordingly. The recently proposed system level synthesis (SLS) framework circumvents this limitation via a richer controller structure with memory. In this work, we propose to optimally design reactive anticipatory robot skills with memory by extending SLS to tracking problems involving nonlinear systems and nonquadratic cost functions. We showcase our method with two scenarios exploiting task precisions and object affordances in pick-and-place tasks in a simulated and a real environment with a 7-axis Franka Emika robot.
Generative Adversarial Network to Learn Valid Distributions of Robot Configurations for Inverse Kinematics and Constrained Motion Planning
Nov 11, 2020
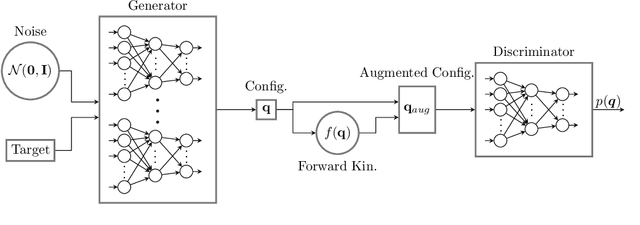
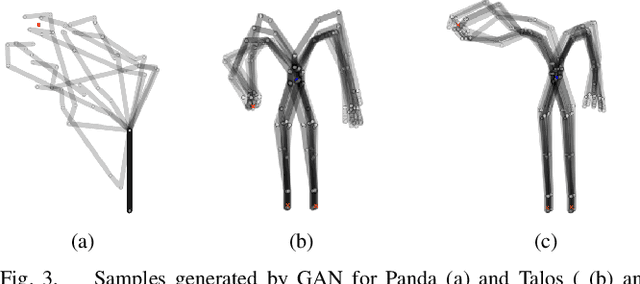

In high dimensional robotic system, the manifold of the valid configuration space often has complex shape, especially under constraints such as end-effector orientation, static stability, and obstacles. We propose a generative adversarial network approach to learn the distribution of valid robot configurations. It can generate configurations that are close to the constraint manifold. We present two applications of this method. First, by learning the conditional distribution with respect to the desired end-effector position, we can do fast inverse kinematics even for very high degrees-of-freedom (DoF) systems. Then, it can be used to generate samples in sampling based constrained motion planning algorithms to reduce the necessary projection steps, speeding up computation. We validate the approach in simulation using the 7-DoF Panda manipulator and the 28-DoF humanoid robot Talos.