Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNullspace Structure in Model Predictive Control
Paper and Code
May 23, 2019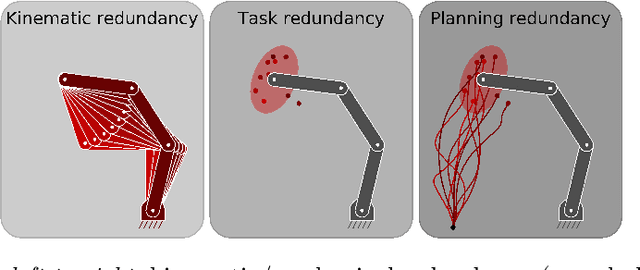
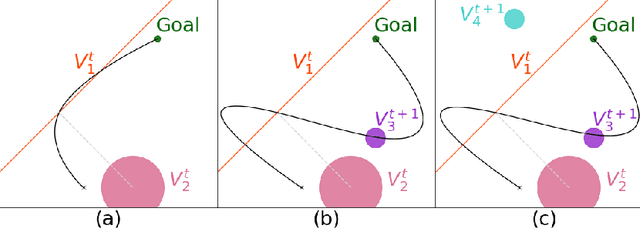
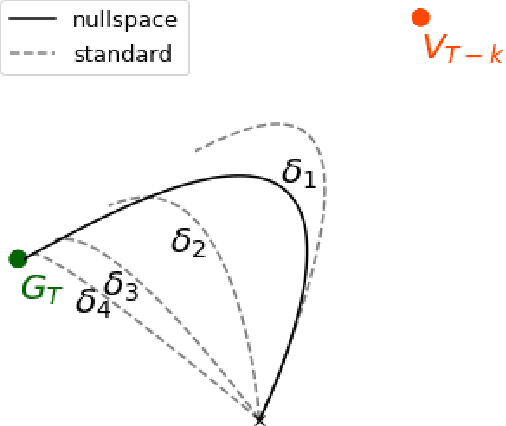
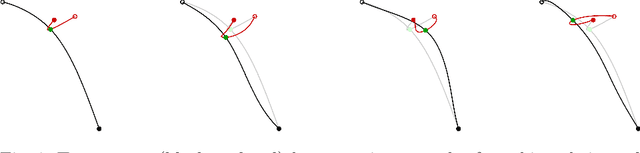
Robotic tasks can be accomplished by exploiting different forms of redundancies. This work focuses on planning redundancy within Model Predictive Control (MPC) in which several paths can be considered within the MPC time horizon. We present the nullspace structure in MPC with a quadratic approximation of the cost and a linearization of the dynamics. We exploit the low rank structure of the precision matrices used in MPC (encapsulating spatiotemporal information) to perform hierarchical task planning, and show how nullspace computation can be treated as a fusion problem (computed with a product of Gaussian experts). We illustrate the approach using proof-of-concept examples with point mass objects and simulated robotics applications.
View paper on