 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriveCode: Domain Specific Numerical Encoding for LLM-Based Autonomous Driving
Mar 01, 2026Large language models (LLMs) have shown great promise for autonomous driving. However, discretizing numbers into tokens limits precise numerical reasoning, fails to reflect the positional significance of digits in the training objective, and makes it difficult to achieve both decoding efficiency and numerical precision. These limitations affect both the processing of sensor measurements and the generation of precise control commands, creating a fundamental barrier for deploying LLM-based autonomous driving systems. In this paper, we introduce DriveCode, a novel numerical encoding method that represents numbers as dedicated embeddings rather than discrete text tokens. DriveCode employs a number projector to map numbers into the language model's hidden space, enabling seamless integration with visual and textual features in a unified multimodal sequence. Evaluated on OmniDrive, DriveGPT4, and DriveGPT4-V2 datasets, DriveCode demonstrates superior performance in trajectory prediction and control signal generation, confirming its effectiveness for LLM-based autonomous driving systems.
InVDriver: Intra-Instance Aware Vectorized Query-Based Autonomous Driving Transformer
Feb 25, 2025



End-to-end autonomous driving with its holistic optimization capabilities, has gained increasing traction in academia and industry. Vectorized representations, which preserve instance-level topological information while reducing computational overhead, have emerged as a promising paradigm. While existing vectorized query-based frameworks often overlook the inherent spatial correlations among intra-instance points, resulting in geometrically inconsistent outputs (e.g., fragmented HD map elements or oscillatory trajectories). To address these limitations, we propose InVDriver, a novel vectorized query-based system that systematically models intra-instance spatial dependencies through masked self-attention layers, thereby enhancing planning accuracy and trajectory smoothness. Across all core modules, i.e., perception, prediction, and planning, InVDriver incorporates masked self-attention mechanisms that restrict attention to intra-instance point interactions, enabling coordinated refinement of structural elements while suppressing irrelevant inter-instance noise. Experimental results on the nuScenes benchmark demonstrate that InVDriver achieves state-of-the-art performance, surpassing prior methods in both accuracy and safety, while maintaining high computational efficiency. Our work validates that explicit modeling of intra-instance geometric coherence is critical for advancing vectorized autonomous driving systems, bridging the gap between theoretical advantages of end-to-end frameworks and practical deployment requirements.
RGM: Reconstructing High-fidelity 3D Car Assets with Relightable 3D-GS Generative Model from a Single Image
Oct 10, 2024



The generation of high-quality 3D car assets is essential for various applications, including video games, autonomous driving, and virtual reality. Current 3D generation methods utilizing NeRF or 3D-GS as representations for 3D objects, generate a Lambertian object under fixed lighting and lack separated modelings for material and global illumination. As a result, the generated assets are unsuitable for relighting under varying lighting conditions, limiting their applicability in downstream tasks. To address this challenge, we propose a novel relightable 3D object generative framework that automates the creation of 3D car assets, enabling the swift and accurate reconstruction of a vehicle's geometry, texture, and material properties from a single input image. Our approach begins with introducing a large-scale synthetic car dataset comprising over 1,000 high-precision 3D vehicle models. We represent 3D objects using global illumination and relightable 3D Gaussian primitives integrating with BRDF parameters. Building on this representation, we introduce a feed-forward model that takes images as input and outputs both relightable 3D Gaussians and global illumination parameters. Experimental results demonstrate that our method produces photorealistic 3D car assets that can be seamlessly integrated into road scenes with different illuminations, which offers substantial practical benefits for industrial applications.
Policy Bifurcation in Safe Reinforcement Learning
Mar 28, 2024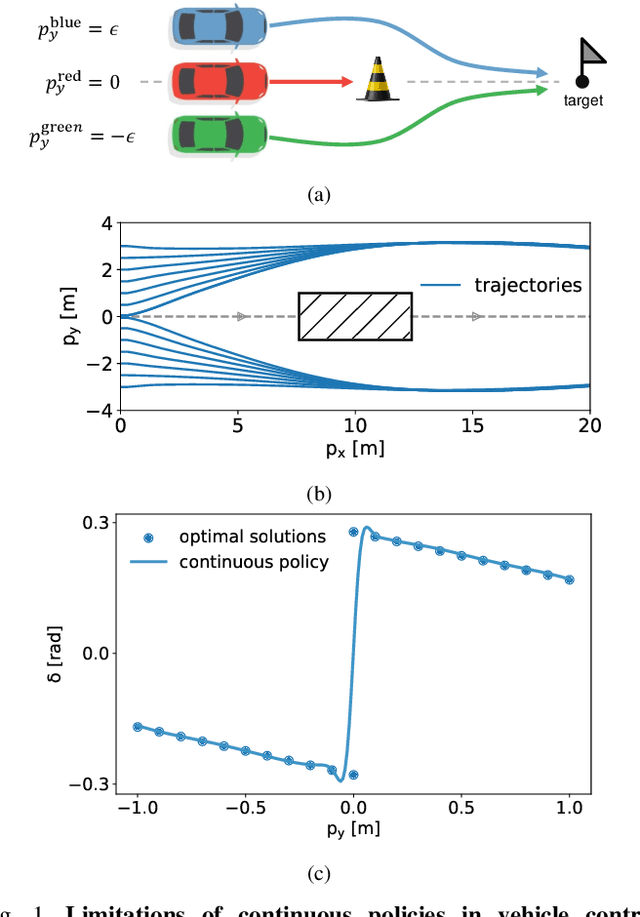
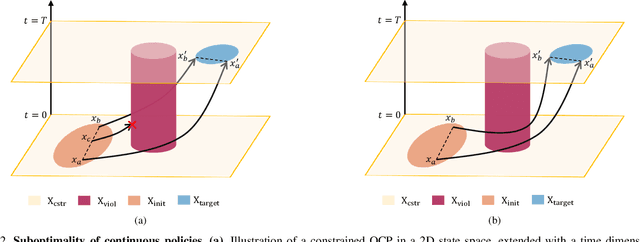
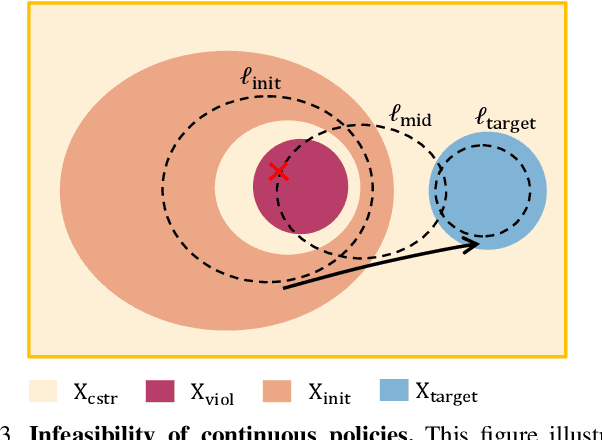
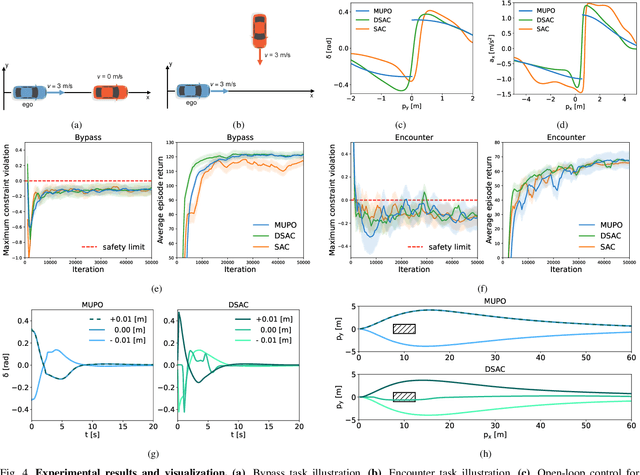
Safe reinforcement learning (RL) offers advanced solutions to constrained optimal control problems. Existing studies in safe RL implicitly assume continuity in policy functions, where policies map states to actions in a smooth, uninterrupted manner; however, our research finds that in some scenarios, the feasible policy should be discontinuous or multi-valued, interpolating between discontinuous local optima can inevitably lead to constraint violations. We are the first to identify the generating mechanism of such a phenomenon, and employ topological analysis to rigorously prove the existence of policy bifurcation in safe RL, which corresponds to the contractibility of the reachable tuple. Our theorem reveals that in scenarios where the obstacle-free state space is non-simply connected, a feasible policy is required to be bifurcated, meaning its output action needs to change abruptly in response to the varying state. To train such a bifurcated policy, we propose a safe RL algorithm called multimodal policy optimization (MUPO), which utilizes a Gaussian mixture distribution as the policy output. The bifurcated behavior can be achieved by selecting the Gaussian component with the highest mixing coefficient. Besides, MUPO also integrates spectral normalization and forward KL divergence to enhance the policy's capability of exploring different modes. Experiments with vehicle control tasks show that our algorithm successfully learns the bifurcated policy and ensures satisfying safety, while a continuous policy suffers from inevitable constraint violations.
Empowering LLM to use Smartphone for Intelligent Task Automation
Sep 09, 2023Mobile task automation is an attractive technique that aims to enable voice-based hands-free user interaction with smartphones. However, existing approaches suffer from poor scalability due to the limited language understanding ability and the non-trivial manual efforts required from developers or end-users. The recent advance of large language models (LLMs) in language understanding and reasoning inspires us to rethink the problem from a model-centric perspective, where task preparation, comprehension, and execution are handled by a unified language model. In this work, we introduce AutoDroid, a mobile task automation system that can handle arbitrary tasks on any Android application without manual efforts. The key insight is to combine the commonsense knowledge of LLMs and domain-specific knowledge of apps through automated dynamic analysis. The main components include a functionality-aware UI representation method that bridges the UI with the LLM, exploration-based memory injection techniques that augment the app-specific domain knowledge of LLM, and a multi-granularity query optimization module that reduces the cost of model inference. We integrate AutoDroid with off-the-shelf LLMs including online GPT-4/GPT-3.5 and on-device Vicuna, and evaluate its performance on a new benchmark for memory-augmented Android task automation with 158 common tasks. The results demonstrated that AutoDroid is able to precisely generate actions with an accuracy of 90.9%, and complete tasks with a success rate of 71.3%, outperforming the GPT-4-powered baselines by 36.4% and 39.7%. The demo, benchmark suites, and source code of AutoDroid will be released at url{https://autodroid-sys.github.io/}.
AIGC Empowering Telecom Sector White Paper_chinese
Jul 24, 2023In the global craze of GPT, people have deeply realized that AI, as a transformative technology and key force in economic and social development, will bring great leaps and breakthroughs to the global industry and profoundly influence the future world competition pattern. As the builder and operator of information and communication infrastructure, the telecom sector provides infrastructure support for the development of AI, and even takes the lead in the implementation of AI applications. How to enable the application of AIGC (GPT) and implement AIGC in the telecom sector are questions that telecom practitioners must ponder and answer. Through the study of GPT, a typical representative of AIGC, the authors have analyzed how GPT empowers the telecom sector in the form of scenarios, discussed the gap between the current GPT general model and telecom services, proposed for the first time a Telco Augmented Cognition capability system, provided answers to how to construct a telecom service GPT in the telecom sector, and carried out various practices. Our counterparts in the industry are expected to focus on collaborative innovation around telecom and AI, build an open and shared innovation ecosystem, promote the deep integration of AI and telecom sector, and accelerate the construction of next-generation information infrastructure, in an effort to facilitate the digital transformation of the economy and society.
6G Network Business Support System
Jul 19, 2023



6G is the next-generation intelligent and integrated digital information infrastructure, characterized by ubiquitous interconnection, native intelligence, multi-dimensional perception, global coverage, green and low-carbon, native network security, etc. 6G will realize the transition from serving people and people-things communication to supporting the efficient connection of intelligent agents, and comprehensively leading the digital, intelligent and green transformation of the economy and the society. As the core support system for mobile communication network, 6 6G BSS need to integrate with new business models brought about by the development of the next-generation Internet and IT, upgrade from "network-centric" to "business and service centric" and "customer-centric". 6G OSS and BSS systems need to strengthen their integration to improve the operational efficiency and benefits of customers by connecting the digital intelligence support capabilities on both sides of supply and demand. This paper provides a detailed introduction to the overall vision, potential key technologies, and functional architecture of 6G BSS systems. It also presents an evolutionary roadmap and technological prospects for the BSS systems from 5G to 6G.
A High Fidelity Simulation Framework for Potential Safety Benefits Estimation of Cooperative Pedestrian Perception
Oct 18, 2022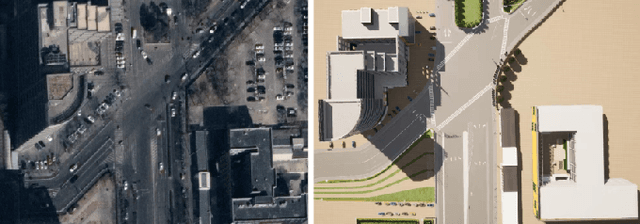
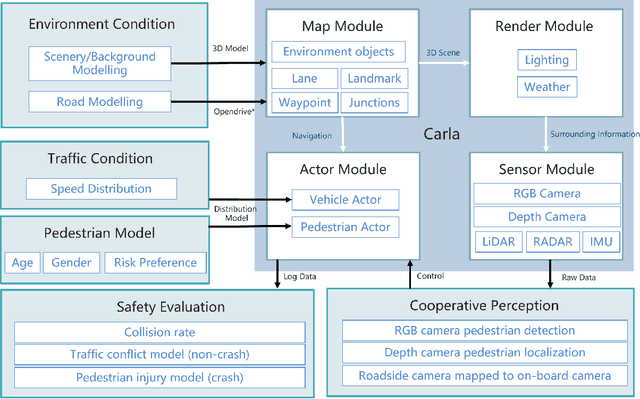
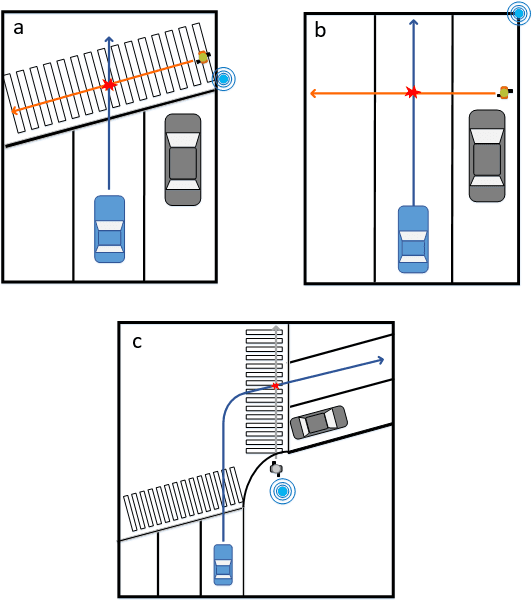
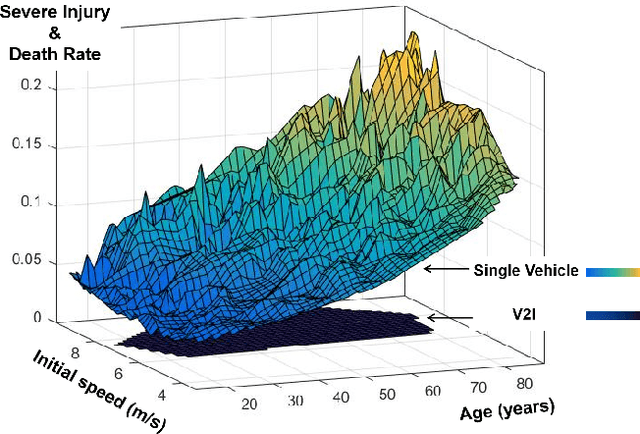
This paper proposes a high-fidelity simulation framework that can estimate the potential safety benefits of vehicle-to-infrastructure (V2I) pedestrian safety strategies. This simulator can support cooperative perception algorithms in the loop by simulating the environmental conditions, traffic conditions, and pedestrian characteristics at the same time. Besides, the benefit estimation model applied in our framework can systematically quantify both the risk conflict (non-crash condition) and the severity of the pedestrian's injuries (crash condition). An experiment was conducted in this paper that built a digital twin of a crowded urban intersection in China. The result shows that our framework is efficient for safety benefit estimation of V2I pedestrian safety strategies.
The QXS-SAROPT Dataset for Deep Learning in SAR-Optical Data Fusion
Mar 15, 2021Deep learning techniques have made an increasing impact on the field of remote sensing. However, deep neural networks based fusion of multimodal data from different remote sensors with heterogenous characteristics has not been fully explored, due to the lack of availability of big amounts of perfectly aligned multi-sensor image data with diverse scenes of high resolution, especially for synthetic aperture radar (SAR) data and optical imagery. In this paper, we publish the QXS-SAROPT dataset to foster deep learning research in SAR-optical data fusion. QXS-SAROPT comprises 20,000 pairs of corresponding image patches, collected from three port cities: San Diego, Shanghai and Qingdao acquired by the SAR satellite GaoFen-3 and optical satellites of Google Earth. Besides a detailed description of the dataset, we show exemplary results for two representative applications, namely SAR-optical image matching and SAR ship detection boosted by cross-modal information from optical images. Since QXS-SAROPT is a large open dataset with multiple scenes of the highest resolution of this kind, we believe it will support further developments in the field of deep learning based SAR-optical data fusion for remote sensing.
Boosting ship detection in SAR images with complementary pretraining techniques
Mar 15, 2021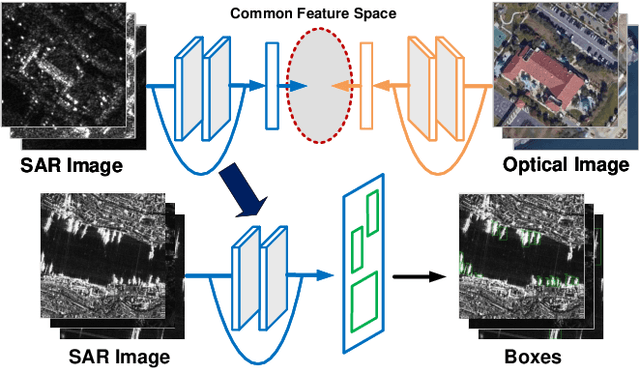
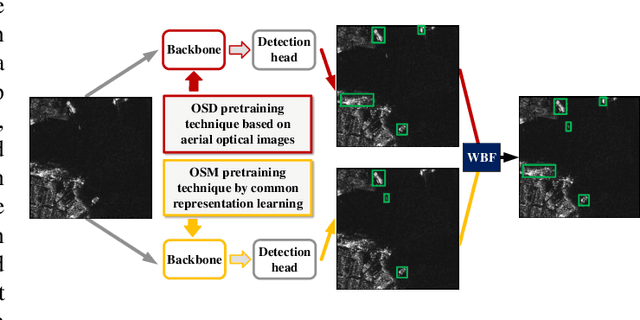
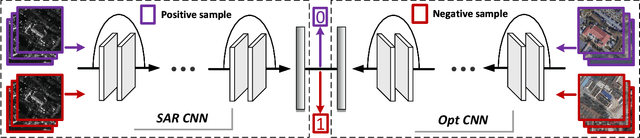
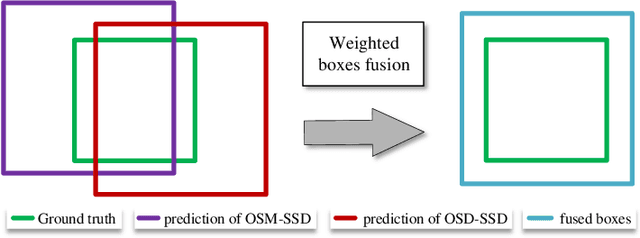
Deep learning methods have made significant progress in ship detection in synthetic aperture radar (SAR) images. The pretraining technique is usually adopted to support deep neural networks-based SAR ship detectors due to the scarce labeled SAR images. However, directly leveraging ImageNet pretraining is hardly to obtain a good ship detector because of different imaging perspective and geometry. In this paper, to resolve the problem of inconsistent imaging perspective between ImageNet and earth observations, we propose an optical ship detector (OSD) pretraining technique, which transfers the characteristics of ships in earth observations to SAR images from a large-scale aerial image dataset. On the other hand, to handle the problem of different imaging geometry between optical and SAR images, we propose an optical-SAR matching (OSM) pretraining technique, which transfers plentiful texture features from optical images to SAR images by common representation learning on the optical-SAR matching task. Finally, observing that the OSD pretraining based SAR ship detector has a better recall on sea area while the OSM pretraining based SAR ship detector can reduce false alarms on land area, we combine the predictions of the two detectors through weighted boxes fusion to further improve detection results. Extensive experiments on four SAR ship detection datasets and two representative CNN-based detection benchmarks are conducted to show the effectiveness and complementarity of the two proposed detectors, and the state-of-the-art performance of the combination of the two detectors. The proposed method won the sixth place of ship detection in SAR images in 2020 Gaofen challenge.