 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne Flight Over the Gap: A Survey from Perspective to Panoramic Vision
Sep 04, 2025



Driven by the demand for spatial intelligence and holistic scene perception, omnidirectional images (ODIs), which provide a complete 360\textdegree{} field of view, are receiving growing attention across diverse applications such as virtual reality, autonomous driving, and embodied robotics. Despite their unique characteristics, ODIs exhibit remarkable differences from perspective images in geometric projection, spatial distribution, and boundary continuity, making it challenging for direct domain adaption from perspective methods. This survey reviews recent panoramic vision techniques with a particular emphasis on the perspective-to-panorama adaptation. We first revisit the panoramic imaging pipeline and projection methods to build the prior knowledge required for analyzing the structural disparities. Then, we summarize three challenges of domain adaptation: severe geometric distortions near the poles, non-uniform sampling in Equirectangular Projection (ERP), and periodic boundary continuity. Building on this, we cover 20+ representative tasks drawn from more than 300 research papers in two dimensions. On one hand, we present a cross-method analysis of representative strategies for addressing panoramic specific challenges across different tasks. On the other hand, we conduct a cross-task comparison and classify panoramic vision into four major categories: visual quality enhancement and assessment, visual understanding, multimodal understanding, and visual generation. In addition, we discuss open challenges and future directions in data, models, and applications that will drive the advancement of panoramic vision research. We hope that our work can provide new insight and forward looking perspectives to advance the development of panoramic vision technologies. Our project page is https://insta360-research-team.github.io/Survey-of-Panorama
A Systematic Investigation on Deep Learning-Based Omnidirectional Image and Video Super-Resolution
Jun 07, 2025Omnidirectional image and video super-resolution is a crucial research topic in low-level vision, playing an essential role in virtual reality and augmented reality applications. Its goal is to reconstruct high-resolution images or video frames from low-resolution inputs, thereby enhancing detail preservation and enabling more accurate scene analysis and interpretation. In recent years, numerous innovative and effective approaches have been proposed, predominantly based on deep learning techniques, involving diverse network architectures, loss functions, projection strategies, and training datasets. This paper presents a systematic review of recent progress in omnidirectional image and video super-resolution, focusing on deep learning-based methods. Given that existing datasets predominantly rely on synthetic degradation and fall short in capturing real-world distortions, we introduce a new dataset, 360Insta, that comprises authentically degraded omnidirectional images and videos collected under diverse conditions, including varying lighting, motion, and exposure settings. This dataset addresses a critical gap in current omnidirectional benchmarks and enables more robust evaluation of the generalization capabilities of omnidirectional super-resolution methods. We conduct comprehensive qualitative and quantitative evaluations of existing methods on both public datasets and our proposed dataset. Furthermore, we provide a systematic overview of the current status of research and discuss promising directions for future exploration. All datasets, methods, and evaluation metrics introduced in this work are publicly available and will be regularly updated. Project page: https://github.com/nqian1/Survey-on-ODISR-and-ODVSR.
Hierarchical Flow Diffusion for Efficient Frame Interpolation
Apr 01, 2025



Most recent diffusion-based methods still show a large gap compared to non-diffusion methods for video frame interpolation, in both accuracy and efficiency. Most of them formulate the problem as a denoising procedure in latent space directly, which is less effective caused by the large latent space. We propose to model bilateral optical flow explicitly by hierarchical diffusion models, which has much smaller search space in the denoising procedure. Based on the flow diffusion model, we then use a flow-guided images synthesizer to produce the final result. We train the flow diffusion model and the image synthesizer end to end. Our method achieves state of the art in accuracy, and 10+ times faster than other diffusion-based methods. The project page is at: https://hfd-interpolation.github.io.
A2Perf: Real-World Autonomous Agents Benchmark
Mar 04, 2025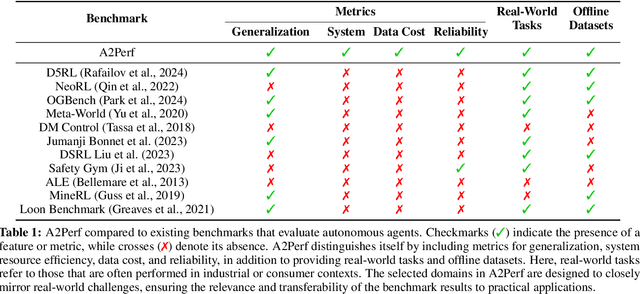
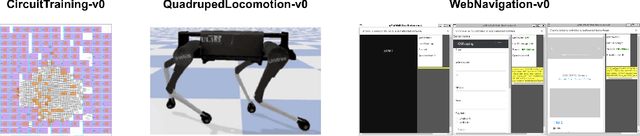
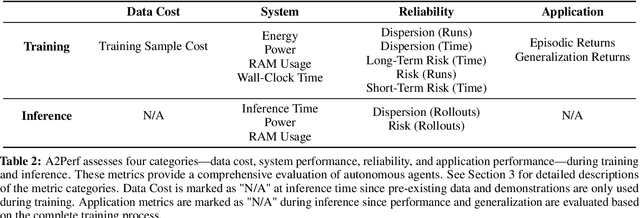
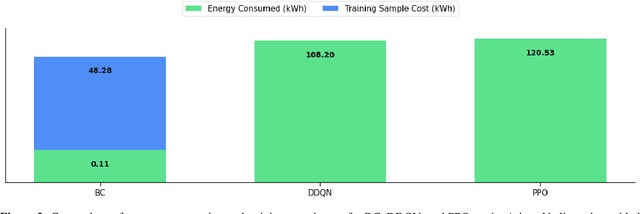
Autonomous agents and systems cover a number of application areas, from robotics and digital assistants to combinatorial optimization, all sharing common, unresolved research challenges. It is not sufficient for agents to merely solve a given task; they must generalize to out-of-distribution tasks, perform reliably, and use hardware resources efficiently during training and inference, among other requirements. Several methods, such as reinforcement learning and imitation learning, are commonly used to tackle these problems, each with different trade-offs. However, there is a lack of benchmarking suites that define the environments, datasets, and metrics which can be used to provide a meaningful way for the community to compare progress on applying these methods to real-world problems. We introduce A2Perf--a benchmark with three environments that closely resemble real-world domains: computer chip floorplanning, web navigation, and quadruped locomotion. A2Perf provides metrics that track task performance, generalization, system resource efficiency, and reliability, which are all critical to real-world applications. Using A2Perf, we demonstrate that web navigation agents can achieve latencies comparable to human reaction times on consumer hardware, reveal reliability trade-offs between algorithms for quadruped locomotion, and quantify the energy costs of different learning approaches for computer chip-design. In addition, we propose a data cost metric to account for the cost incurred acquiring offline data for imitation learning and hybrid algorithms, which allows us to better compare these approaches. A2Perf also contains several standard baselines, enabling apples-to-apples comparisons across methods and facilitating progress in real-world autonomy. As an open-source benchmark, A2Perf is designed to remain accessible, up-to-date, and useful to the research community over the long term.
DEFOM-Stereo: Depth Foundation Model Based Stereo Matching
Jan 16, 2025



Stereo matching is a key technique for metric depth estimation in computer vision and robotics. Real-world challenges like occlusion and non-texture hinder accurate disparity estimation from binocular matching cues. Recently, monocular relative depth estimation has shown remarkable generalization using vision foundation models. Thus, to facilitate robust stereo matching with monocular depth cues, we incorporate a robust monocular relative depth model into the recurrent stereo-matching framework, building a new framework for depth foundation model-based stereo-matching, DEFOM-Stereo. In the feature extraction stage, we construct the combined context and matching feature encoder by integrating features from conventional CNNs and DEFOM. In the update stage, we use the depth predicted by DEFOM to initialize the recurrent disparity and introduce a scale update module to refine the disparity at the correct scale. DEFOM-Stereo is verified to have comparable performance on the Scene Flow dataset with state-of-the-art (SOTA) methods and notably shows much stronger zero-shot generalization. Moreover, DEFOM-Stereo achieves SOTA performance on the KITTI 2012, KITTI 2015, Middlebury, and ETH3D benchmarks, ranking 1st on many metrics. In the joint evaluation under the robust vision challenge, our model simultaneously outperforms previous models on the individual benchmarks. Both results demonstrate the outstanding capabilities of the proposed model.
Probing many-body Bell correlation depth with superconducting qubits
Jun 25, 2024


Quantum nonlocality describes a stronger form of quantum correlation than that of entanglement. It refutes Einstein's belief of local realism and is among the most distinctive and enigmatic features of quantum mechanics. It is a crucial resource for achieving quantum advantages in a variety of practical applications, ranging from cryptography and certified random number generation via self-testing to machine learning. Nevertheless, the detection of nonlocality, especially in quantum many-body systems, is notoriously challenging. Here, we report an experimental certification of genuine multipartite Bell correlations, which signal nonlocality in quantum many-body systems, up to 24 qubits with a fully programmable superconducting quantum processor. In particular, we employ energy as a Bell correlation witness and variationally decrease the energy of a many-body system across a hierarchy of thresholds, below which an increasing Bell correlation depth can be certified from experimental data. As an illustrating example, we variationally prepare the low-energy state of a two-dimensional honeycomb model with 73 qubits and certify its Bell correlations by measuring an energy that surpasses the corresponding classical bound with up to 48 standard deviations. In addition, we variationally prepare a sequence of low-energy states and certify their genuine multipartite Bell correlations up to 24 qubits via energies measured efficiently by parity oscillation and multiple quantum coherence techniques. Our results establish a viable approach for preparing and certifying multipartite Bell correlations, which provide not only a finer benchmark beyond entanglement for quantum devices, but also a valuable guide towards exploiting multipartite Bell correlation in a wide spectrum of practical applications.
RomniStereo: Recurrent Omnidirectional Stereo Matching
Jan 26, 2024



Omnidirectional stereo matching (OSM) is an essential and reliable means for $360^{\circ}$ depth sensing. However, following earlier works on conventional stereo matching, prior state-of-the-art (SOTA) methods rely on a 3D encoder-decoder block to regularize the cost volume, causing the whole system complicated and sub-optimal results. Recently, the Recurrent All-pairs Field Transforms (RAFT) based approach employs the recurrent update in 2D and has efficiently improved image-matching tasks, ie, optical flow, and stereo matching. To bridge the gap between OSM and RAFT, we mainly propose an opposite adaptive weighting scheme to seamlessly transform the outputs of spherical sweeping of OSM into the required inputs for the recurrent update, thus creating a recurrent omnidirectional stereo matching (RomniStereo) algorithm. Furthermore, we introduce two techniques, ie, grid embedding and adaptive context feature generation, which also contribute to RomniStereo's performance. Our best model improves the average MAE metric by 40.7\% over the previous SOTA baseline across five datasets. When visualizing the results, our models demonstrate clear advantages on both synthetic and realistic examples. The code is available at \url{https://github.com/HalleyJiang/RomniStereo}.
"I am the follower, also the boss": Exploring Different Levels of Autonomy and Machine Forms of Guiding Robots for the Visually Impaired
Feb 07, 2023



Guiding robots, in the form of canes or cars, have recently been explored to assist blind and low vision (BLV) people. Such robots can provide full or partial autonomy when guiding. However, the pros and cons of different forms and autonomy for guiding robots remain unknown. We sought to fill this gap. We designed autonomy-switchable guiding robotic cane and car. We conducted a controlled lab-study (N=12) and a field study (N=9) on BLV. Results showed that full autonomy received better walking performance and subjective ratings in the controlled study, whereas participants used more partial autonomy in the natural environment as demanding more control. Besides, the car robot has demonstrated abilities to provide a higher sense of safety and navigation efficiency compared with the cane robot. Our findings offered empirical evidence about how the BLV community perceived different machine forms and autonomy, which can inform the design of assistive robots.
An Improved RaftStereo Trained with A Mixed Dataset for the Robust Vision Challenge 2022
Oct 23, 2022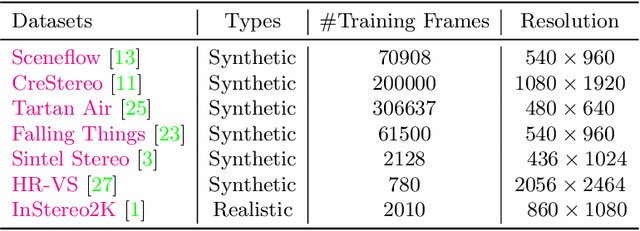
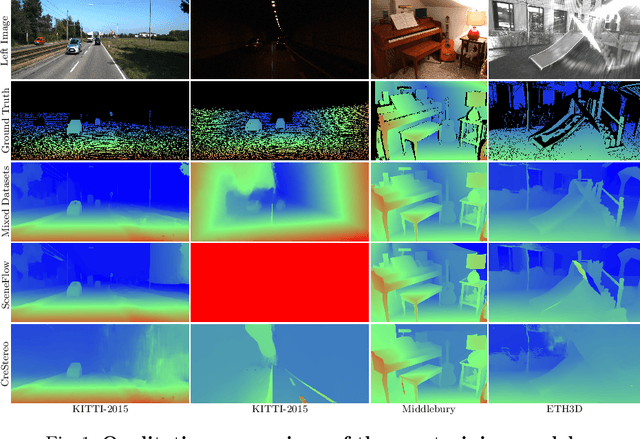
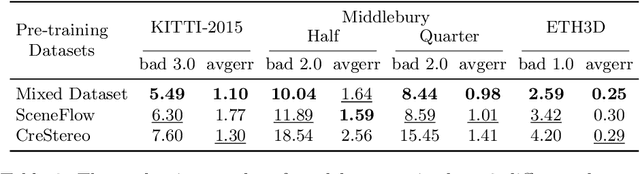
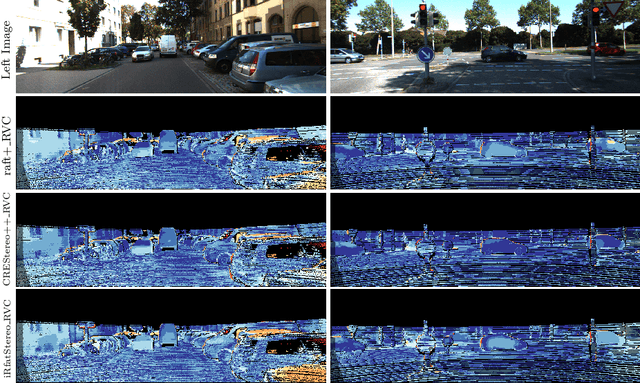
Stereo-matching is a fundamental problem in computer vision. Despite recent progress by deep learning, improving the robustness is ineluctable when deploying stereo-matching models to real-world applications. Different from the common practices, i.e., developing an elaborate model to achieve robustness, we argue that collecting multiple available datasets for training is a cheaper way to increase generalization ability. Specifically, this report presents an improved RaftStereo trained with a mixed dataset of seven public datasets for the robust vision challenge (denoted as iRaftStereo_RVC). When evaluated on the training sets of Middlebury, KITTI-2015, and ETH3D, the model outperforms its counterparts trained with only one dataset, such as the popular Sceneflow. After fine-tuning the pre-trained model on the three datasets of the challenge, it ranks at 2nd place on the stereo leaderboard, demonstrating the benefits of mixed dataset pre-training.
A High Fidelity Simulation Framework for Potential Safety Benefits Estimation of Cooperative Pedestrian Perception
Oct 18, 2022
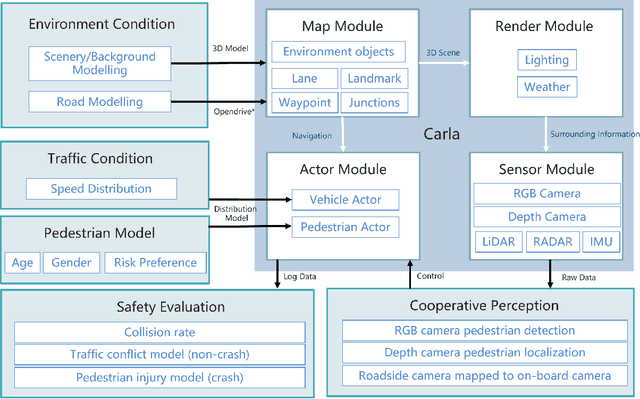
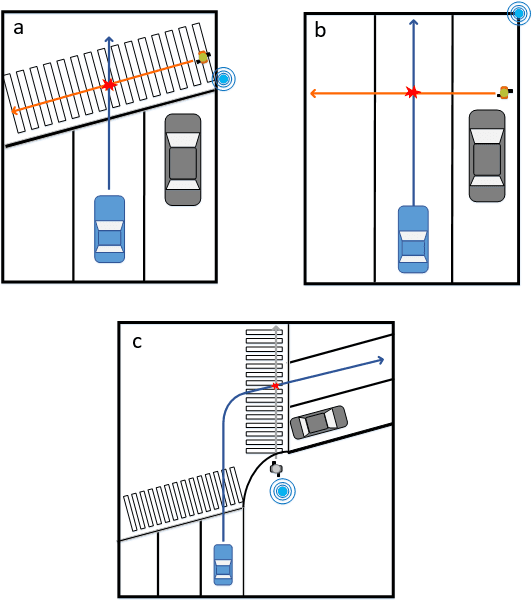
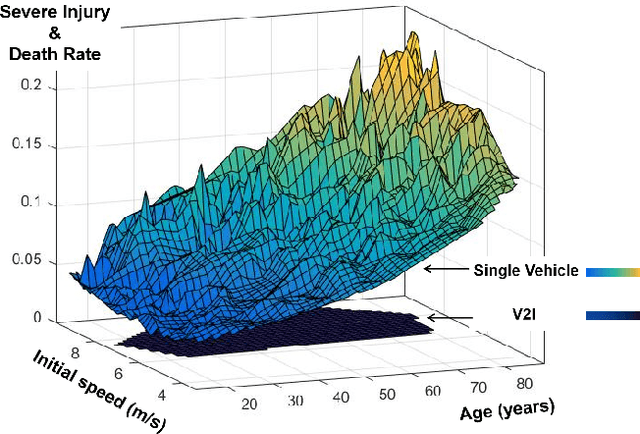
This paper proposes a high-fidelity simulation framework that can estimate the potential safety benefits of vehicle-to-infrastructure (V2I) pedestrian safety strategies. This simulator can support cooperative perception algorithms in the loop by simulating the environmental conditions, traffic conditions, and pedestrian characteristics at the same time. Besides, the benefit estimation model applied in our framework can systematically quantify both the risk conflict (non-crash condition) and the severity of the pedestrian's injuries (crash condition). An experiment was conducted in this paper that built a digital twin of a crowded urban intersection in China. The result shows that our framework is efficient for safety benefit estimation of V2I pedestrian safety strategies.