 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRACO: A Denoising-Reconstruction Autoencoder for Cryo-EM
Oct 15, 2024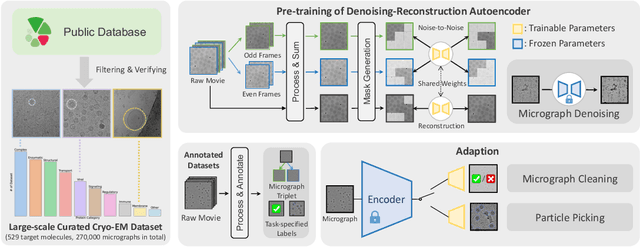
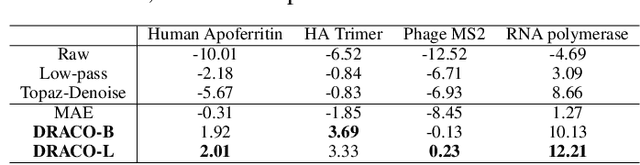
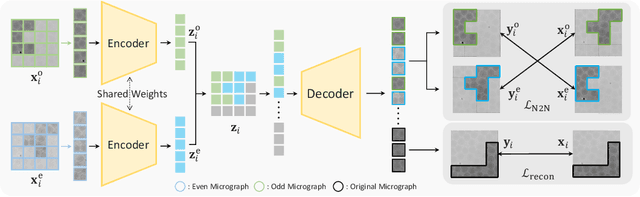

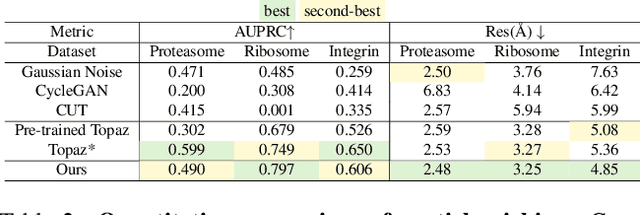
Foundation models in computer vision have demonstrated exceptional performance in zero-shot and few-shot tasks by extracting multi-purpose features from large-scale datasets through self-supervised pre-training methods. However, these models often overlook the severe corruption in cryogenic electron microscopy (cryo-EM) images by high-level noises. We introduce DRACO, a Denoising-Reconstruction Autoencoder for CryO-EM, inspired by the Noise2Noise (N2N) approach. By processing cryo-EM movies into odd and even images and treating them as independent noisy observations, we apply a denoising-reconstruction hybrid training scheme. We mask both images to create denoising and reconstruction tasks. For DRACO's pre-training, the quality of the dataset is essential, we hence build a high-quality, diverse dataset from an uncurated public database, including over 270,000 movies or micrographs. After pre-training, DRACO naturally serves as a generalizable cryo-EM image denoiser and a foundation model for various cryo-EM downstream tasks. DRACO demonstrates the best performance in denoising, micrograph curation, and particle picking tasks compared to state-of-the-art baselines. We will release the code, pre-trained models, and the curated dataset to stimulate further research.
GenEM: Physics-Informed Generative Cryo-Electron Microscopy
Dec 04, 2023


In the past decade, deep conditional generative models have revolutionized the generation of realistic images, extending their application from entertainment to scientific domains. Single-particle cryo-electron microscopy (cryo-EM) is crucial in resolving near-atomic resolution 3D structures of proteins, such as the SARS-COV-2 spike protein. To achieve high-resolution reconstruction, AI models for particle picking and pose estimation have been adopted. However, their performance is still limited as they lack high-quality annotated datasets. To address this, we introduce physics-informed generative cryo-electron microscopy (GenEM), which for the first time integrates physical-based cryo-EM simulation with a generative unpaired noise translation to generate physically correct synthetic cryo-EM datasets with realistic noises. Initially, GenEM simulates the cryo-EM imaging process based on a virtual specimen. To generate realistic noises, we leverage an unpaired noise translation via contrastive learning with a novel mask-guided sampling scheme. Extensive experiments show that GenEM is capable of generating realistic cryo-EM images. The generated dataset can further enhance particle picking and pose estimation models, eventually improving the reconstruction resolution. We will release our code and annotated synthetic datasets.
"I am the follower, also the boss": Exploring Different Levels of Autonomy and Machine Forms of Guiding Robots for the Visually Impaired
Feb 07, 2023



Guiding robots, in the form of canes or cars, have recently been explored to assist blind and low vision (BLV) people. Such robots can provide full or partial autonomy when guiding. However, the pros and cons of different forms and autonomy for guiding robots remain unknown. We sought to fill this gap. We designed autonomy-switchable guiding robotic cane and car. We conducted a controlled lab-study (N=12) and a field study (N=9) on BLV. Results showed that full autonomy received better walking performance and subjective ratings in the controlled study, whereas participants used more partial autonomy in the natural environment as demanding more control. Besides, the car robot has demonstrated abilities to provide a higher sense of safety and navigation efficiency compared with the cane robot. Our findings offered empirical evidence about how the BLV community perceived different machine forms and autonomy, which can inform the design of assistive robots.
Can Quadruped Navigation Robots be Used as Guide Dogs?
Oct 18, 2022
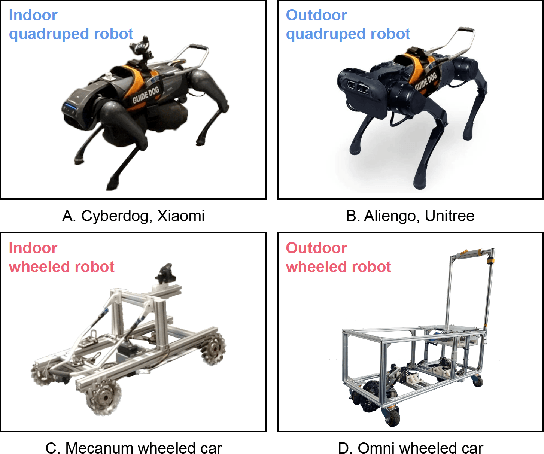
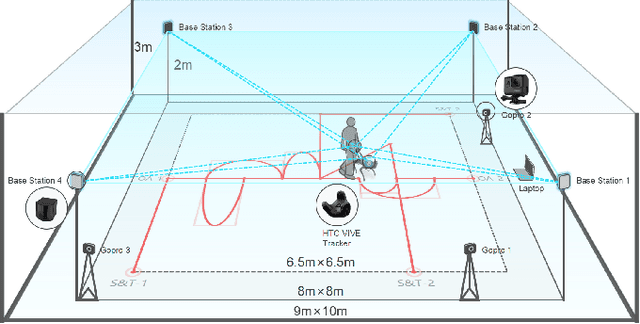
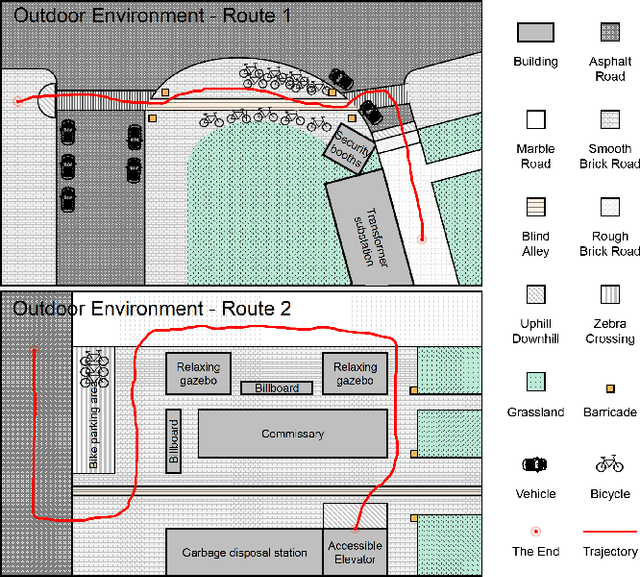
Bionic robots are generally considered to have strong flexibility, adaptability, and stability. Their bionic forms are more likely to interact emotionally with people, which means obvious advantages as socially assistive robots. However, it has not been widely concerned and verified in the blind and low-vision community. In this paper, we explored the guiding performance and experience of bionic quadruped robots compared to wheeled robots. We invited the visually impaired participants to complete a) the indoor straight & turn task and obstacle avoidance task in a laboratory environment; b) the outdoor real and complex environment. With the transition from indoor to outdoor, we found that the workload of the bionic quadruped robots changed to insignificant. Moreover, obvious temporal demand indoors changed to significant mental demand outdoors. Also, there was no significant advantage of quadruped robots in usability, trust, or satisfaction, which was amplified outdoors. We concluded that walking noise and the gait of quadruped robots would limit the guiding effect to a certain extent, and the empathetic effect of its zoomorphic form for visually impaired people could not be fully reflected. This paper provides evidence for the empirical research of bionic quadruped robots in the field of guiding VI people, pointing out their shortcomings in guiding performance and experience, and has good instructive value for the design of bionic guided robots in the future.