 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Quadruped Navigation Robots be Used as Guide Dogs?
Paper and Code
Oct 18, 2022
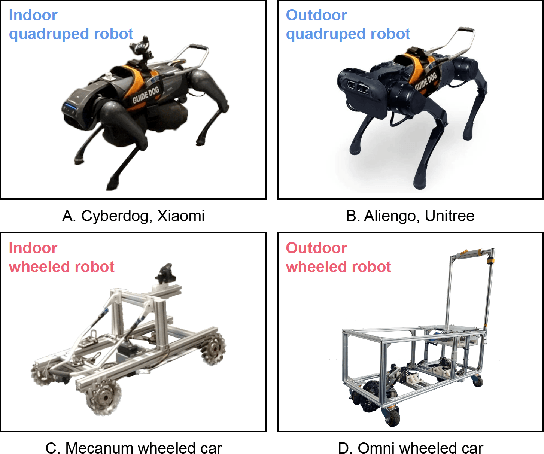
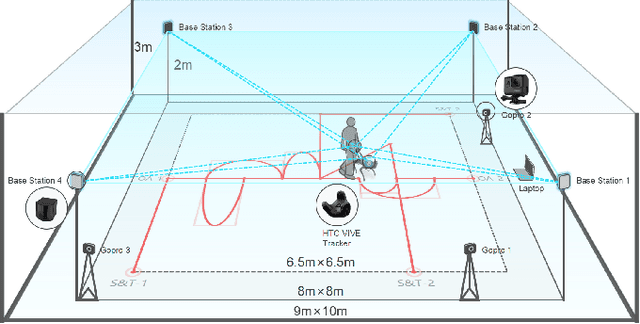
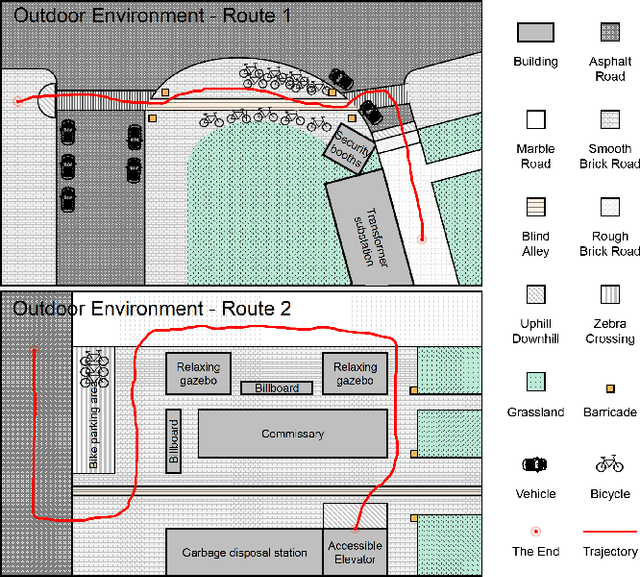
Bionic robots are generally considered to have strong flexibility, adaptability, and stability. Their bionic forms are more likely to interact emotionally with people, which means obvious advantages as socially assistive robots. However, it has not been widely concerned and verified in the blind and low-vision community. In this paper, we explored the guiding performance and experience of bionic quadruped robots compared to wheeled robots. We invited the visually impaired participants to complete a) the indoor straight & turn task and obstacle avoidance task in a laboratory environment; b) the outdoor real and complex environment. With the transition from indoor to outdoor, we found that the workload of the bionic quadruped robots changed to insignificant. Moreover, obvious temporal demand indoors changed to significant mental demand outdoors. Also, there was no significant advantage of quadruped robots in usability, trust, or satisfaction, which was amplified outdoors. We concluded that walking noise and the gait of quadruped robots would limit the guiding effect to a certain extent, and the empathetic effect of its zoomorphic form for visually impaired people could not be fully reflected. This paper provides evidence for the empirical research of bionic quadruped robots in the field of guiding VI people, pointing out their shortcomings in guiding performance and experience, and has good instructive value for the design of bionic guided robots in the future.