 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoBridge: A Hierarchical Architecture Bridging Cognition and Execution for General Robotic Manipulation
May 03, 2025

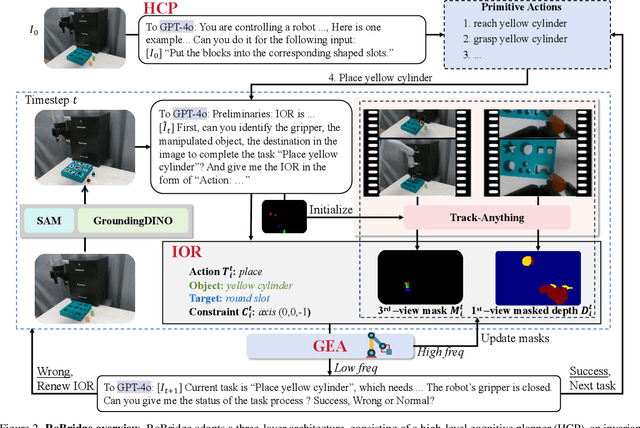

Operating robots in open-ended scenarios with diverse tasks is a crucial research and application direction in robotics. While recent progress in natural language processing and large multimodal models has enhanced robots' ability to understand complex instructions, robot manipulation still faces the procedural skill dilemma and the declarative skill dilemma in open environments. Existing methods often compromise cognitive and executive capabilities. To address these challenges, in this paper, we propose RoBridge, a hierarchical intelligent architecture for general robotic manipulation. It consists of a high-level cognitive planner (HCP) based on a large-scale pre-trained vision-language model (VLM), an invariant operable representation (IOR) serving as a symbolic bridge, and a generalist embodied agent (GEA). RoBridge maintains the declarative skill of VLM and unleashes the procedural skill of reinforcement learning, effectively bridging the gap between cognition and execution. RoBridge demonstrates significant performance improvements over existing baselines, achieving a 75% success rate on new tasks and an 83% average success rate in sim-to-real generalization using only five real-world data samples per task. This work represents a significant step towards integrating cognitive reasoning with physical execution in robotic systems, offering a new paradigm for general robotic manipulation.
InfiniteWorld: A Unified Scalable Simulation Framework for General Visual-Language Robot Interaction
Dec 08, 2024Realizing scaling laws in embodied AI has become a focus. However, previous work has been scattered across diverse simulation platforms, with assets and models lacking unified interfaces, which has led to inefficiencies in research. To address this, we introduce InfiniteWorld, a unified and scalable simulator for general vision-language robot interaction built on Nvidia Isaac Sim. InfiniteWorld encompasses a comprehensive set of physics asset construction methods and generalized free robot interaction benchmarks. Specifically, we first built a unified and scalable simulation framework for embodied learning that integrates a series of improvements in generation-driven 3D asset construction, Real2Sim, automated annotation framework, and unified 3D asset processing. This framework provides a unified and scalable platform for robot interaction and learning. In addition, to simulate realistic robot interaction, we build four new general benchmarks, including scene graph collaborative exploration and open-world social mobile manipulation. The former is often overlooked as an important task for robots to explore the environment and build scene knowledge, while the latter simulates robot interaction tasks with different levels of knowledge agents based on the former. They can more comprehensively evaluate the embodied agent's capabilities in environmental understanding, task planning and execution, and intelligent interaction. We hope that this work can provide the community with a systematic asset interface, alleviate the dilemma of the lack of high-quality assets, and provide a more comprehensive evaluation of robot interactions.
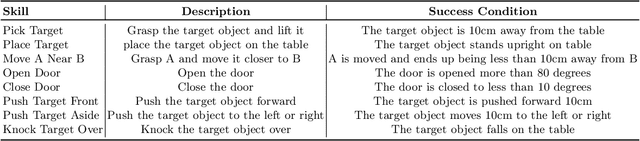
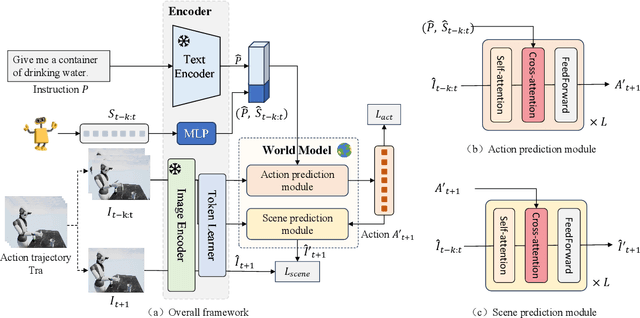
PIVOT-R: Primitive-Driven Waypoint-Aware World Model for Robotic Manipulation
Oct 14, 2024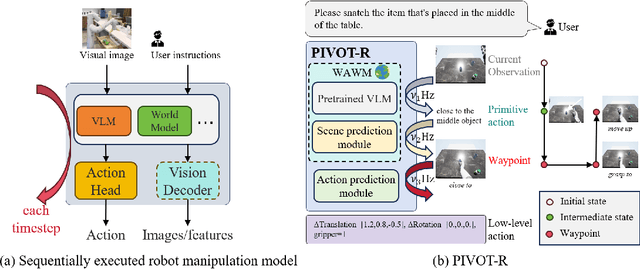
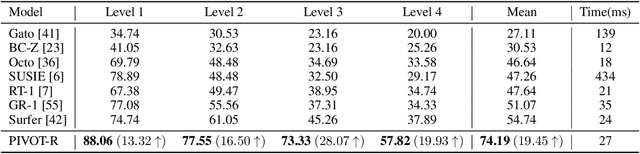
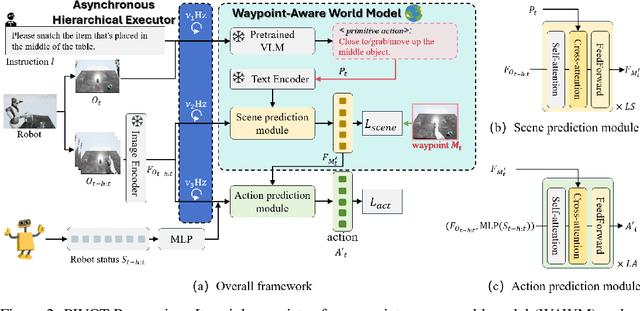
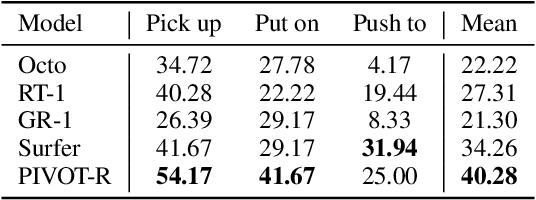
Language-guided robotic manipulation is a challenging task that requires an embodied agent to follow abstract user instructions to accomplish various complex manipulation tasks. Previous work trivially fitting the data without revealing the relation between instruction and low-level executable actions, these models are prone to memorizing the surficial pattern of the data instead of acquiring the transferable knowledge, and thus are fragile to dynamic environment changes. To address this issue, we propose a PrIrmitive-driVen waypOinT-aware world model for Robotic manipulation (PIVOT-R) that focuses solely on the prediction of task-relevant waypoints. Specifically, PIVOT-R consists of a Waypoint-aware World Model (WAWM) and a lightweight action prediction module. The former performs primitive action parsing and primitive-driven waypoint prediction, while the latter focuses on decoding low-level actions. Additionally, we also design an asynchronous hierarchical executor (AHE), which can use different execution frequencies for different modules of the model, thereby helping the model reduce computational redundancy and improve model execution efficiency. Our PIVOT-R outperforms state-of-the-art (SoTA) open-source models on the SeaWave benchmark, achieving an average relative improvement of 19.45% across four levels of instruction tasks. Moreover, compared to the synchronously executed PIVOT-R, the execution efficiency of PIVOT-R with AHE is increased by 28-fold, with only a 2.9% drop in performance. These results provide compelling evidence that our PIVOT-R can significantly improve both the performance and efficiency of robotic manipulation.
OV-DINO: Unified Open-Vocabulary Detection with Language-Aware Selective Fusion
Jul 10, 2024



Open-vocabulary detection is a challenging task due to the requirement of detecting objects based on class names, including those not encountered during training. Existing methods have shown strong zero-shot detection capabilities through pre-training on diverse large-scale datasets. However, these approaches still face two primary challenges: (i) how to universally integrate diverse data sources for end-to-end training, and (ii) how to effectively leverage the language-aware capability for region-level cross-modality understanding. To address these challenges, we propose a novel unified open-vocabulary detection method called OV-DINO, which pre-trains on diverse large-scale datasets with language-aware selective fusion in a unified framework. Specifically, we introduce a Unified Data Integration (UniDI) pipeline to enable end-to-end training and eliminate noise from pseudo-label generation by unifying different data sources into detection-centric data. In addition, we propose a Language-Aware Selective Fusion (LASF) module to enable the language-aware ability of the model through a language-aware query selection and fusion process. We evaluate the performance of the proposed OV-DINO on popular open-vocabulary detection benchmark datasets, achieving state-of-the-art results with an AP of 50.6\% on the COCO dataset and 40.0\% on the LVIS dataset in a zero-shot manner, demonstrating its strong generalization ability. Furthermore, the fine-tuned OV-DINO on COCO achieves 58.4\% AP, outperforming many existing methods with the same backbone. The code for OV-DINO will be available at \href{https://github.com/wanghao9610/OV-DINO}{https://github.com/wanghao9610/OV-DINO}.
MixReorg: Cross-Modal Mixed Patch Reorganization is a Good Mask Learner for Open-World Semantic Segmentation
Aug 09, 2023



Recently, semantic segmentation models trained with image-level text supervision have shown promising results in challenging open-world scenarios. However, these models still face difficulties in learning fine-grained semantic alignment at the pixel level and predicting accurate object masks. To address this issue, we propose MixReorg, a novel and straightforward pre-training paradigm for semantic segmentation that enhances a model's ability to reorganize patches mixed across images, exploring both local visual relevance and global semantic coherence. Our approach involves generating fine-grained patch-text pairs data by mixing image patches while preserving the correspondence between patches and text. The model is then trained to minimize the segmentation loss of the mixed images and the two contrastive losses of the original and restored features. With MixReorg as a mask learner, conventional text-supervised semantic segmentation models can achieve highly generalizable pixel-semantic alignment ability, which is crucial for open-world segmentation. After training with large-scale image-text data, MixReorg models can be applied directly to segment visual objects of arbitrary categories, without the need for further fine-tuning. Our proposed framework demonstrates strong performance on popular zero-shot semantic segmentation benchmarks, outperforming GroupViT by significant margins of 5.0%, 6.2%, 2.5%, and 3.4% mIoU on PASCAL VOC2012, PASCAL Context, MS COCO, and ADE20K, respectively.
RM-PRT: Realistic Robotic Manipulation Simulator and Benchmark with Progressive Reasoning Tasks
Jun 21, 2023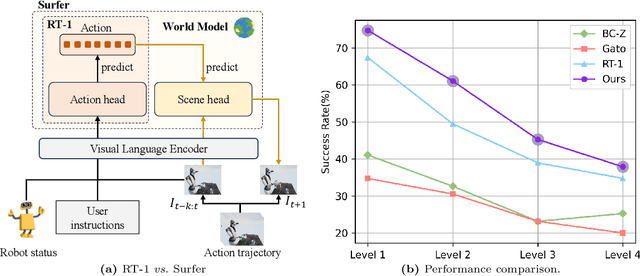
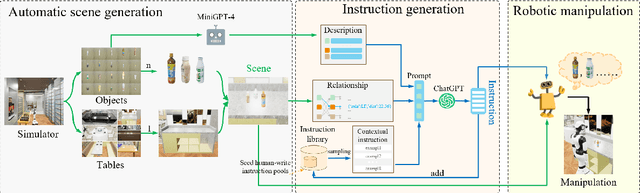
Recently, the advent of pre-trained large-scale language models (LLMs) like ChatGPT and GPT-4 have significantly advanced the machine's natural language understanding capabilities. This breakthrough has allowed us to seamlessly integrate these open-source LLMs into a unified robot simulator environment to help robots accurately understand and execute human natural language instructions. To this end, in this work, we introduce a realistic robotic manipulation simulator and build a Robotic Manipulation with Progressive Reasoning Tasks (RM-PRT) benchmark on this basis. Specifically, the RM-PRT benchmark builds a new high-fidelity digital twin scene based on Unreal Engine 5, which includes 782 categories, 2023 objects, and 15K natural language instructions generated by ChatGPT for a detailed evaluation of robot manipulation. We propose a general pipeline for the RM-PRT benchmark that takes as input multimodal prompts containing natural language instructions and automatically outputs actions containing the movement and position transitions. We set four natural language understanding tasks with progressive reasoning levels and evaluate the robot's ability to understand natural language instructions in two modes of adsorption and grasping. In addition, we also conduct a comprehensive analysis and comparison of the differences and advantages of 10 different LLMs in instruction understanding and generation quality. We hope the new simulator and benchmark will facilitate future research on language-guided robotic manipulation. Project website: https://necolizer.github.io/RM-PRT/ .
CapDet: Unifying Dense Captioning and Open-World Detection Pretraining
Mar 15, 2023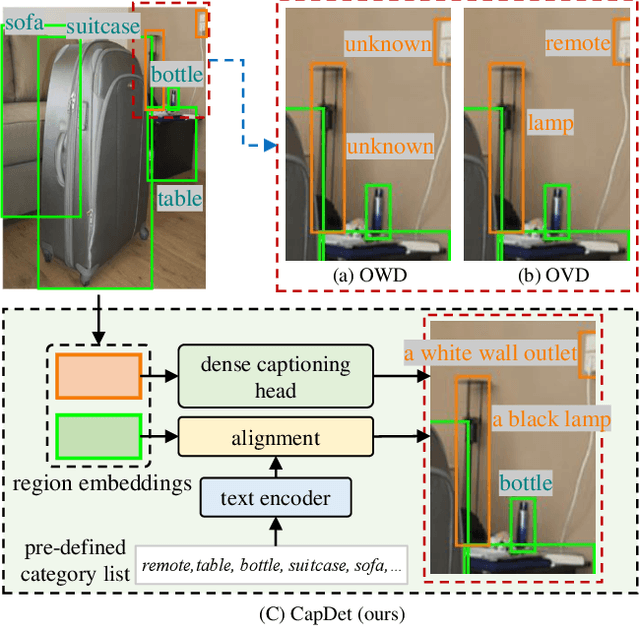

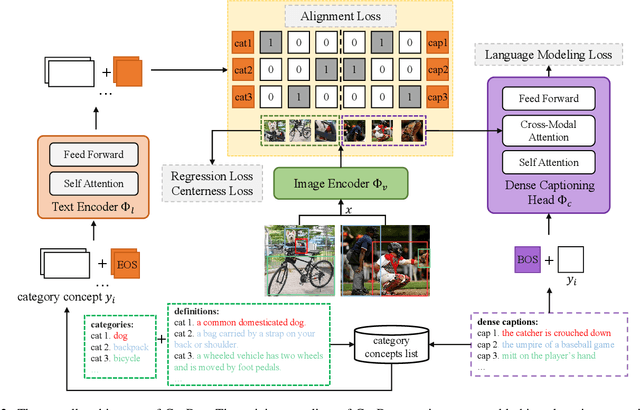

Benefiting from large-scale vision-language pre-training on image-text pairs, open-world detection methods have shown superior generalization ability under the zero-shot or few-shot detection settings. However, a pre-defined category space is still required during the inference stage of existing methods and only the objects belonging to that space will be predicted. To introduce a "real" open-world detector, in this paper, we propose a novel method named CapDet to either predict under a given category list or directly generate the category of predicted bounding boxes. Specifically, we unify the open-world detection and dense caption tasks into a single yet effective framework by introducing an additional dense captioning head to generate the region-grounded captions. Besides, adding the captioning task will in turn benefit the generalization of detection performance since the captioning dataset covers more concepts. Experiment results show that by unifying the dense caption task, our CapDet has obtained significant performance improvements (e.g., +2.1% mAP on LVIS rare classes) over the baseline method on LVIS (1203 classes). Besides, our CapDet also achieves state-of-the-art performance on dense captioning tasks, e.g., 15.44% mAP on VG V1.2 and 13.98% on the VG-COCO dataset.
Beyond Fixation: Dynamic Window Visual Transformer
Apr 08, 2022

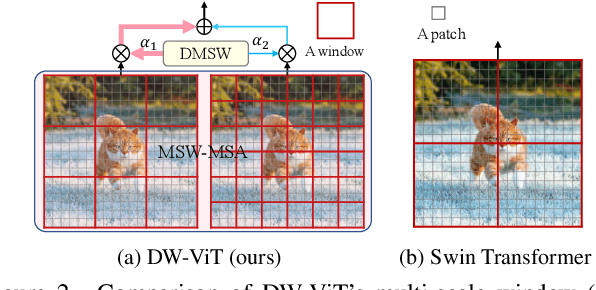

Recently, a surge of interest in visual transformers is to reduce the computational cost by limiting the calculation of self-attention to a local window. Most current work uses a fixed single-scale window for modeling by default, ignoring the impact of window size on model performance. However, this may limit the modeling potential of these window-based models for multi-scale information. In this paper, we propose a novel method, named Dynamic Window Vision Transformer (DW-ViT). The dynamic window strategy proposed by DW-ViT goes beyond the model that employs a fixed single window setting. To the best of our knowledge, we are the first to use dynamic multi-scale windows to explore the upper limit of the effect of window settings on model performance. In DW-ViT, multi-scale information is obtained by assigning windows of different sizes to different head groups of window multi-head self-attention. Then, the information is dynamically fused by assigning different weights to the multi-scale window branches. We conducted a detailed performance evaluation on three datasets, ImageNet-1K, ADE20K, and COCO. Compared with related state-of-the-art (SoTA) methods, DW-ViT obtains the best performance. Specifically, compared with the current SoTA Swin Transformers \cite{liu2021swin}, DW-ViT has achieved consistent and substantial improvements on all three datasets with similar parameters and computational costs. In addition, DW-ViT exhibits good scalability and can be easily inserted into any window-based visual transformers.
Person Search Challenges and Solutions: A Survey
May 01, 2021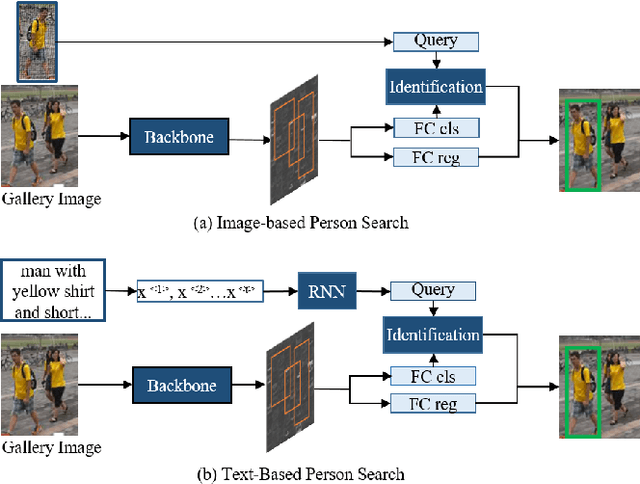
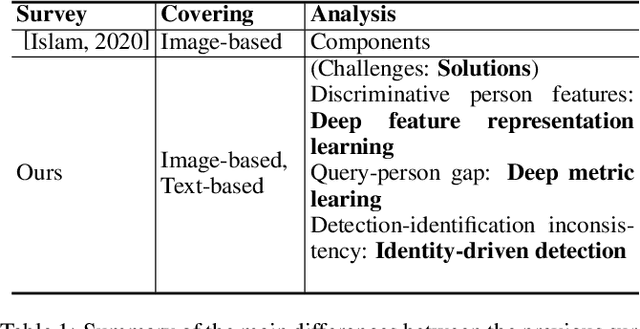

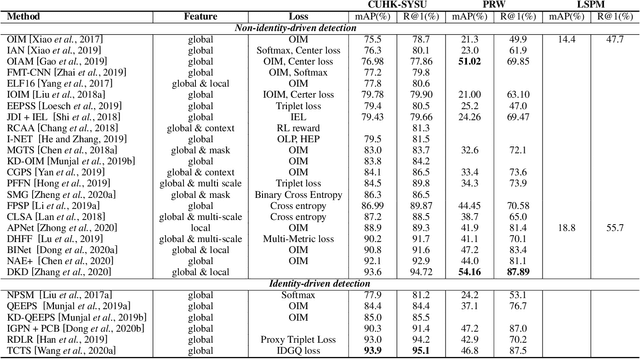
Person search has drawn increasing attention due to its real-world applications and research significance. Person search aims to find a probe person in a gallery of scene images with a wide range of applications, such as criminals search, multicamera tracking, missing person search, etc. Early person search works focused on image-based person search, which uses person image as the search query. Text-based person search is another major person search category that uses free-form natural language as the search query. Person search is challenging, and corresponding solutions are diverse and complex. Therefore, systematic surveys on this topic are essential. This paper surveyed the recent works on image-based and text-based person search from the perspective of challenges and solutions. Specifically, we provide a brief analysis of highly influential person search methods considering the three significant challenges: the discriminative person features, the query-person gap, and the detection-identification inconsistency. We summarise and compare evaluation results. Finally, we discuss open issues and some promising future research directions.
Scene Graphs: A Survey of Generations and Applications
Mar 17, 2021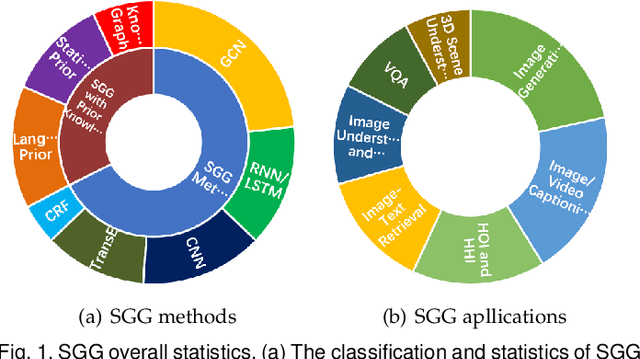

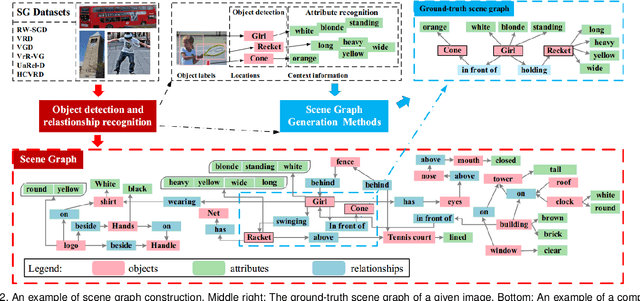
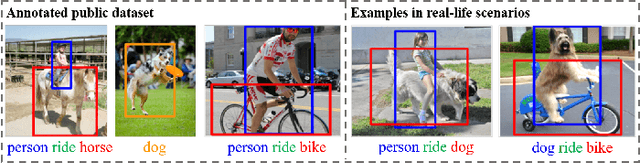
Scene graph is a structured representation of a scene that can clearly express the objects, attributes, and relationships between objects in the scene. As computer vision technology continues to develop, people are no longer satisfied with simply detecting and recognizing objects in images; instead, people look forward to a higher level of understanding and reasoning about visual scenes. For example, given an image, we want to not only detect and recognize objects in the image, but also know the relationship between objects (visual relationship detection), and generate a text description (image captioning) based on the image content. Alternatively, we might want the machine to tell us what the little girl in the image is doing (Visual Question Answering (VQA)), or even remove the dog from the image and find similar images (image editing and retrieval), etc. These tasks require a higher level of understanding and reasoning for image vision tasks. The scene graph is just such a powerful tool for scene understanding. Therefore, scene graphs have attracted the attention of a large number of researchers, and related research is often cross-modal, complex, and rapidly developing. However, no relatively systematic survey of scene graphs exists at present. To this end, this survey conducts a comprehensive investigation of the current scene graph research. More specifically, we first summarized the general definition of the scene graph, then conducted a comprehensive and systematic discussion on the generation method of the scene graph (SGG) and the SGG with the aid of prior knowledge. We then investigated the main applications of scene graphs and summarized the most commonly used datasets. Finally, we provide some insights into the future development of scene graphs. We believe this will be a very helpful foundation for future research on scene graphs.